基于多容惯性标准传递函数的锅炉内胆水温PID控制
2015-02-23 08:41韦晓儒王志萍
上海电力大学学报 2015年3期
韦晓儒,王志萍
(上海电力学院自动化工程学院,上海 200090)
基于多容惯性标准传递函数的锅炉内胆水温PID控制
韦晓儒,王志萍
(上海电力学院自动化工程学院,上海 200090)
提出了一种PID控制器的多容惯性标准传递函数设计方法,并采用Matlab中的Simulink平台,构建了典型串联校正型PID控制系统的仿真试验系统.仿真结果显示,基于多容惯性标准传递函数的PID控制具有无超调、鲁棒性强等优点,有效提高了系统的控制效果.
多容惯性;锅炉内胆水温;PID控制
常规的PID控制器是线性的,适用于小惯性、小滞后的过程,将其直接应用于非线性、大滞后系统,很难获得理想的控制效果.因此,近年来有很多学者将PID控制与其他方法结合起来,通过在线调整PID参数来处理各种不确定性、非线性以及大滞后问题,如模糊PID控制,[1]PSO-PID,[2]PLC-PID[3]等.这些改进的PID控制都不同程度地改善了系统的控制品质,但实现过程较为复杂.
本文尝试采用基于多容惯性(Multiple Capacity Process,MCP)标准传递函数[4]的方法,对PID控制器的参数进行整定,实现过程比较简单.通过与传统PID控制方法的比较可知,基于多容惯性标准传递函数法设计的PID控制方法可以实现系统超调小、鲁棒性强等特点.
1 锅炉内胆水温控制系统
实验系统是一个以DDC为核心的锅炉内胆水温控制系统,能在一定范围内采集和检测水温,具有快速的数字显示和历史图型曲线等显示功能.系统受控对象为单相2.5 kW电加热锅炉,由不锈钢锅炉内胆加温筒和封闭式外循环不锈钢冷却锅炉夹套组成.在实验过程中,将温度变送器所测量到的温度信号与给定锅炉内胆水温度值的偏差作为控制器的输入,控制器按照一定规律(PID控制规律)进行运算,得出控制量的改变值并输出到调压模块.因此,控制器可以通过控制三相调压模块的输出电压,改变电加热器的加热功率,以实现对锅炉内胆水温的控制.
锅炉内胆水温控制系统结构如图1所示.

图1 锅炉内胆水温控制系统结构示意
实验过程以锅炉夹套循环水带走多余热量作为锅炉内胆水温过程自平衡的条件,温度的特性方程可用滞后加一阶惯性环节来描述,其传递函数为:

式中:K——放大系数;
T——时间常数;
τ——滞后时间.
2 基于MCP标准传递函数法的PID控制器设计
多容惯性过程系统是由多个惯性单元串联而成的,其M型次的n阶多容惯性标准传递函数表达式为:

式中:n——系统阶数.
标准传递函数控制器本质上属于线性控制器,其设计方法是基于线性模型的.因此,在对含有滞后环节e-τs的非线性被控过程进行标准传递函数控制器设计时,必须先进行线性化处理,获取等效线性模型.
串联校正型控制系统是典型的PID控制系统,如图2所示.
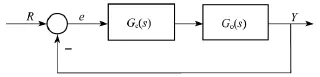
图2 串联校正型控制系统示意
被控过程Go(s)为锅炉内胆水温的等效线性结构,控制器Gc(s)采用的典型PID控制器,其表达式为:

由此可推导出PID控制系统传递函数为:

整理后可得出首一多项式形式的闭环控制系统特征式为:

多容惯性标准传递函数特征式系数如表1所示.闭环控制系统特征式系数如表2所示.

表1 多容惯性标准传递函数中的系数
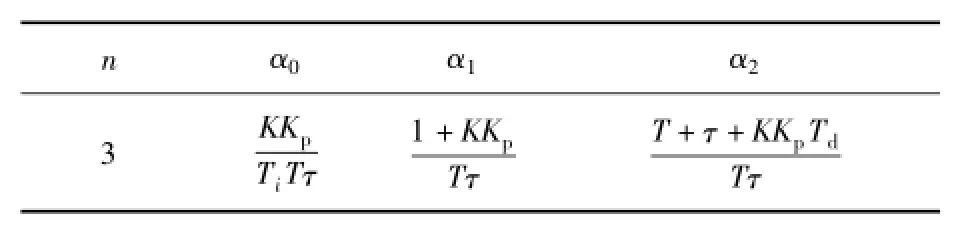
表2 闭环控制系统特征多项式系数
由上述两种系数的对应关系,可导出被控过程描述为二阶有自平衡特性时的PID参数整定公式,其系数如表3所示.

表3 有自平衡二阶系统PID参数整定公式系数
表1和表3中的参数Tβ表示系统的惯性时间,该参数与系统的调整时间ts的关系可表示为:

式中:Kn——表示Tβ,n,ts三者关系的系数,[4]实验得出在二阶系统时Kn=2.38.
式(6)可变换为:

这样,将求惯性时间Tβ的问题转化为确定调整时间的问题,而参数调整时间ts的物理意义明确,更容易确定.此时,ts为期望的调整时间,它可以根据被控过程的过渡时间或用常规PID控制的调整时间来确定.
3 锅炉内胆水温控制器的设计和仿真
3.1 锅炉对象模型的建立
通过锅炉内胆水温的动态特性实验对系统进行建模,如图3所示.其中,系统的输入为调压模块给定的加热电流值,锅炉内胆水温为被控制量,输出为锅炉内胆的水温.
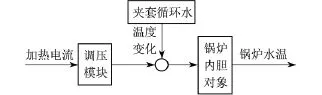
图3 锅炉对象特性实验模型
根据采集的实验数据,按照滞后加一阶惯性环节的特性,利用最小二乘法对该系统进行辨识,得出锅炉内胆水温控制系统对象的传递函数为:

3.2 锅炉水温过程的线性化
为了进行标准传递函数控制器的设计,需要对含有迟延环节的G(s)进行线性化处理.多容惯性模型公式为:

取x=1,利用式(8)和式(9)可将模型G(s)变换为Gx(s):

因此,锅炉内胆水温控制系统对象的传递函数可近似为:

3.3 实验仿真和比较
3.3.1 传统PID和MCP法的PID比较
本文采用经典PID算法中的Z-N算法与MCP标准传递函数的PID算法进行比较分析,模型见图4.由表3及式(7)可知,对于不同的调整时间ts,经MCP整定出的PID参数也不相同,对于系统的控制性能也可能有不同的效果.实验比较了3组不同ts下的PID参数,结果见图5.
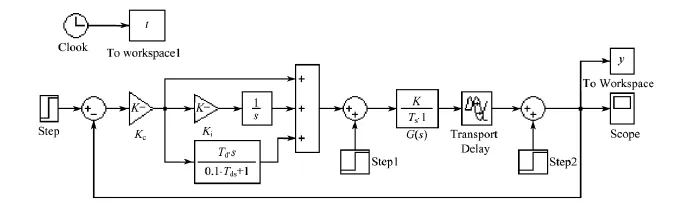
图4 Simulink系统仿真模型结构
当ts=255 s时,系统的响应时间较快,超调量较小;当ts较小时(<255 s),系统响应快,但震荡剧烈,很难达到稳定;当ts过大时(>255 s),系统响应时间较长,超调量较大.3组实验数据如下:
(1)ts=190 s时,KpMCP1=0.993 2,TiMCP1= 117.759 4,TdMCP=17.361 8;
(2)ts=255 s时,KpMCP2=0.544 1,TiMCP2= 155.958 6,TdMCP2=12.820 6;
(3)ts=320 s时,KpMCP3=0.339 5,TiMCP3= 192.329 0,TdMCP3=2.589 6.
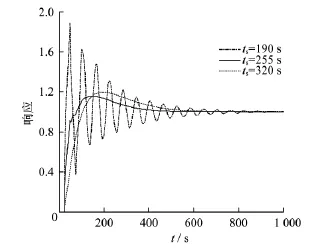
图5 不同ts下的PID控制效果
根据实验可得,在理想调整时间ts=255 s条件下,基于多容惯性标准传递函数方法整定出的PID参数为:KpMCP=0.544 1,TiMCP=155.958 6,TdMCP=12.820 6;而根据Z-N整定方法[5-6]整定出的PID参数为:KPzn=1.149 1,Tizn=43.304 8,Tdzn=11.826 2.将两组控制器参数进行实验仿真比较,结果如图6所示.与Z-N方法相比,基于多容惯性标准传递函数方法整定的PID参数对系统的控制效果更好,主要表现为系统震荡幅度小,且超调量小.
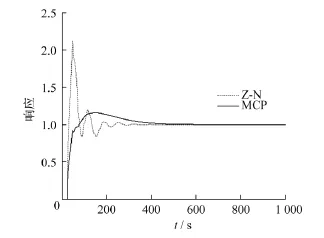
图6 Z-N和MCP两种方法的仿真结果
3.3.2 系统抗干扰能力比较
当系统稳定时,在系统的输出加入一个阶跃扰动,采用图4所示的模型进行仿真.对比Z-N和MCP两种PID控制方法的抗干扰能力,其结果如图7所示.由图7可以看出,在相同的干扰下,MCP法PID控制的系统输出抗干扰能力要强于Z-N法.
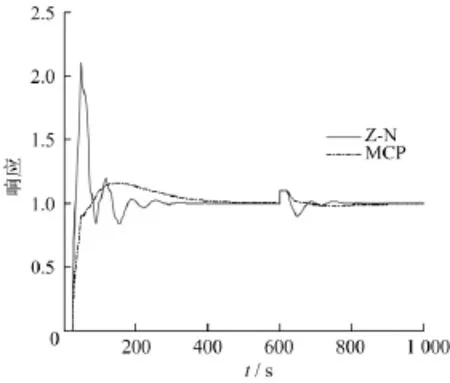
图7 系统输出扰动仿真结果
3.3.3 系统鲁棒性能比较
用Z-N和MCP标准传递函数两种方法整定出的PID参数对系统进行控制,适当调整对象特性传递函数G(s)中K和T的值,观察响应曲线的变化情况.
图8为系统T值波动-20%时的响应曲线.通过对比可以看出,采用Z-N法且T值变化-20%时,系统出现大幅震荡,响应效果偏差很大.而采用MCP法时,系统响应效果偏差较小,系统稳定性较好.

图8 T值波动-20%的响应效果
4 结语
锅炉内胆水温控制系统具有大惯性、大滞后、非线性等特点,常规PID控制效果较差,难以满足系统的控制要求.本文提出了一种PID控制器的多容惯性标准传递函数设计方法,并在系统抗干扰性、鲁棒性等方面与传统Z-N公式法整定的PID控制方法进行比较.仿真结果显示,基于多容惯性标准传递函数的PID控制较传统Z-N公式法整定的PID参数控制效果更好,具有无超调、抗干扰性强、鲁棒性强等优点,有效提高了系统的控制性能.
[1]吴文进.锅炉温度控制系统的设计与仿真研究[J].常熟理工学院学报,2013(4):91-94.
[2]李玉娜.基于遗传算法的锅炉水温PID控制寻优[J].工业控制计算机,2010(9):59-60.
[3]张亚闽,王福明.基于PLC-PID参数整定的锅炉水温控制系统[J].技术与应用,2011(6):22-25.
[4]杨平.多容惯性标准传递函数控制器:设计理论及应用知识[M].北京:中国电力出版社,2013:1-49.
[5]杨平,翁思义,郭平.自动控制原理:理论篇[M].北京:中国电力出版社,2009:133-136.
[6]杨平,余洁.自动控制原理:实验与实践篇[M].北京:中国电力出版社,2011:87-99.
(编辑 白林雪)
PID Control of the Boiler Inner Water-temperature Based on the Multiple Capacity Process Transfer Function Standard Form
WEI Xiaoru,WANG Zhiping
(School of Automation Engineering,Shanghai University of Electric Power,Shanghai200090,China)
A design method of a multiple capacity process transfer function standard form of the PID controller is put forward.The Simulink platform in Matlab is employed to build the simulation test system for a typical type series correction PID control system.The simulation results show that PID control method based on the multiple capacity process transfer function standard form owns noovershoot and strong robustness to original PID control,and it efficiently improves the control effect of the system.
multiple capacity process;boiler inner water-temperature;PID control
TK323
A
1006-4729(2015)03-0288-05
10.3969/j.issn.1006-4729.2015.03.020
2015-03-13
韦晓儒(1991-),女,在读硕士,广西河池人.主要研究方向为火电厂单元机组协调控制策略.E-mail:xiaoru91@163.com.
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
粉末冶金技术(2021年3期)2021-07-28
紫禁城(2020年9期)2020-10-27
测控技术(2018年7期)2018-12-09
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
光学精密工程(2016年4期)2016-11-07
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
电测与仪表(2014年11期)2014-04-04
中学生数理化·八年级物理人教版(2014年2期)2014-04-02