1200m半潜式钻井平台运动响应研究
2015-02-22 09:43覃刚李亚男唐文献张建丁浩张宗政
机械制造与自动化 2015年2期
覃刚,李亚男,唐文献,张建,丁浩,张宗政
(1. 武汉船用机械有限责任公司 湖北 武汉 430084 2. 江苏科技大学 机械工程学院,江苏 镇江 212003)


1200m半潜式钻井平台运动响应研究
覃刚1,李亚男2,唐文献2,张建2,丁浩2,张宗政2
(1. 武汉船用机械有限责任公司 湖北 武汉 430084 2. 江苏科技大学 机械工程学院,江苏 镇江 212003)
摘要:采用中国船级社《海上移动平台入级与建造规范》的设计要求,对工作水深为1200m的深水半潜式钻井平台进行了结构设计,分析了目标平台所受海洋环境载荷的组成及分类,在风、浪、流的联合作用下对平台进行了时域耦合分析,研究规则波与非规则波下的平台运动响应;对比分析了系泊缆预紧力对平台运动的影响,结果表明,带有预紧力的系泊缆能明显抑制平台的运动,即可以通过人为的增加平台阻尼来限制半潜式平台的定位精度,对深水半潜式海洋钻井平台的耐波性设计具有指导意义。
关键词:深水半潜式平台;时域耦合;运动响应;预紧力;耐波性
0引言
随着海洋油气开采逐步由浅水大陆架海区向深水领域迈进,各种新型深水海洋平台相继应运而生,深水半潜式钻井平台在我国海域的应用越来越广泛。
国外对于浮式平台的研究起步较早,1950年John[1]等学者对浮式平台的运动响应进行了研究;Wu[2]等学者对规则波下半潜式平台的浮体和锚泊系统的作用力进行了数值计算;近年来,随着半潜式平台的广泛使用,国内学者关于半潜式平台的研究也日渐增多,2007年,孙金丽[3]等人在时域内数值模拟了波浪作用下锚泊系统的动力响应;2010年周素莲[4]等人研究了不同的系泊方式对锚泊系统的运动影响;2011年,翟钢军[5]等人对风浪联合作用下深水半潜式平台运动响应模型进行了研究分析。海洋环境复杂多变,只考虑波浪或者风浪的影响会导致分析结果的片面性,在风、浪、流联合作用下锚泊系统运动响应的大小决定了结构物的安全稳定和工作性能,因此有必要研究风、浪、流联合作用下深水半潜式平台的动力响应,本文对深水半潜式平台在考虑非线性影响下采用时域计算方法进行时域耦合分析、定位及安全性能分析。
采用中国船级社《海上移动平台入级与建造规范》的设计要求,对平台进行结构设计,选取合适的系泊缆,建立目标平台受风、浪、流的共同作下的水动力模型;分析目标平台所承受海洋环境载荷的组成及分类,研究深水半潜式海洋平台的动力特性。
1半潜式平台水动力模型
建立深海半潜式钻井平台在1200 m工作水深的水动力模型,包括用来模拟水面以下平台形状的湿表面模型和模拟平台质量的质量模型。动力湿表面模型如图1(a)所示,表1为目标平台的主要设计参数;利用频域计算的结果,对半潜平台及其系泊系统进行非线性时域耦合分析。图1(b)系泊缆布锚方式及风、浪、流载荷施加方向,系泊系统采用8条缆对称的布锚方式,钢丝绳模拟系泊缆,系泊缆长1290m,直径924mm,轴向刚度EA7.846×108,最小破断力8.396×106N,湿质量35.3kg/m。
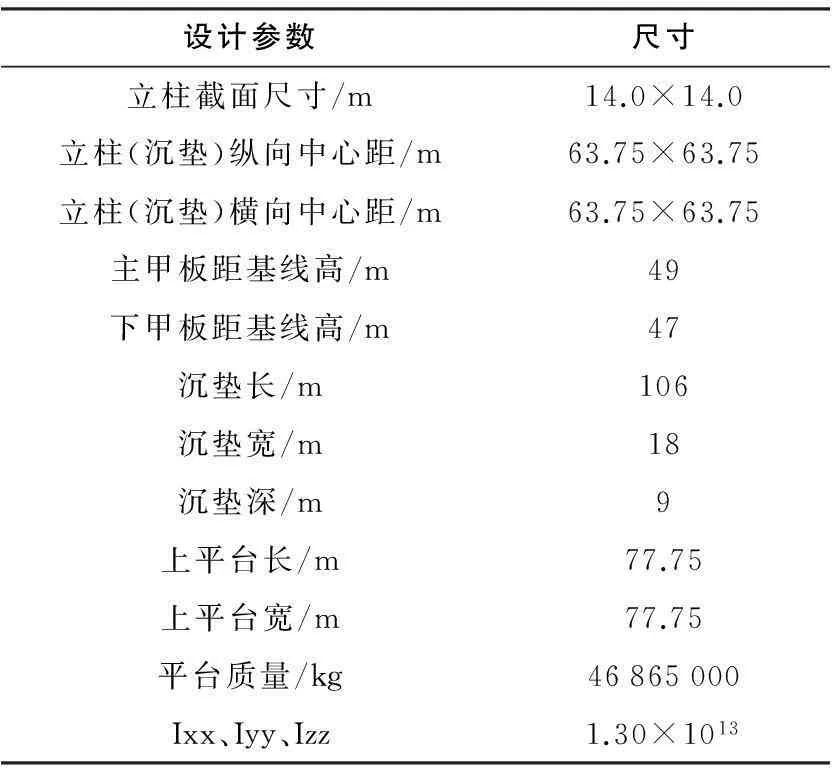
表1 目标平台的主要设计参数
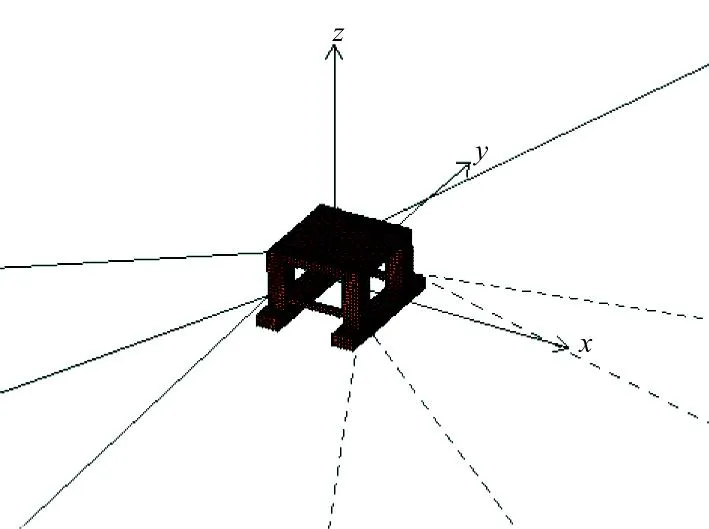
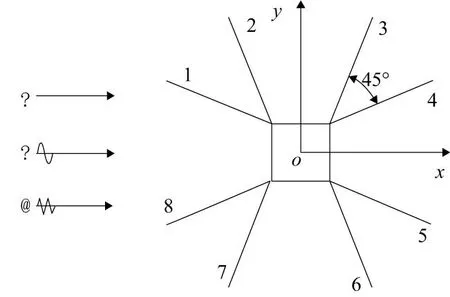
图1 平台模型及系泊缆布置示意图
2数值计算理论
平台运动响应的数值计算采用AQWA软件,其计算理论主要基于经验公式Morison法和三维势能理论。Morison法主要考虑波浪对结构物的粘滞效应和附加质量效应,对于尺度大于0.2的海工结构物,波浪对结构物的作用主要是附加质量效应和绕射效应,主要采用三维势流理论计算波浪对结构物的作用力。对于半潜式平台的浮体和立柱采用势流理论计算波浪力,对于横撑和系泊缆则采用Morison方程计算,由Morison方程计算得到的粘性阻尼增加到由势流理论得到的阻尼项中,得到更加精确合理的结果,以下为Morison方程的计算公式(即作用在长度为DZ的垂直刚性圆柱切片上的水平力):

(1)
式中:力的正方向为波浪的传播方向;ρ0为水的密度;D为圆柱直径;u和a1分别为切片中未受扰动流体的水平流速和加速度;CM和CD为质量系数和阻力系数。
3环境载荷
3.1 风、流载荷的计算
作用于平台的风载荷由风力FW和力矩Mw组成,其一般表达式为:

(2)
(3)
式中:Cw为风力系数,由于本半潜式平台船体属于大结构物,本计算取值为1;ρ0为20°时的空气密度,取1.224×10-3Kn·S2·m-4;A为平台在迎风方向的投影面积;L为风力作用点到平台重心的距离。
流载荷的计算方法跟风载荷类似,其一般表达式为:
(4)
(5)
式中:Cc为流体的阻力系数,由于本半潜式平台船体属于大结构物,本计算取值为1;ρc为海水密度;A为平台在流速方向的投影面积;L为流力作用点到平台重心的距离。
3.2 环境载荷的施加
自存工况采用中国船级社《海上移动平台入级与建造规范》的设计载荷进行模拟分析,设计水深1200m,综合考虑系泊缆动力学和风、浪、流的共同作用,取波浪(规则波和不规则波)幅值均4.16m,周期均为10s;风速取自存状态51.5m/s;流速取1.5m/s。本文针对风、浪、流同向(沿x轴正向)的海况进行研究,均按迎浪方向考虑,仿真时间为5000s。
4计算结果及比较分析
4.1 规则波与不规则波对平台(系泊缆无预紧力)的影响研究
在相同的风、流作用下,研究半潜式平台规则波与不规则波(相同波高和频率)作用下的运动响应,以下从平台的垂荡、纵荡、纵摇三个方面来进行分析。由图2(a)规则波下平台的垂荡运动平均幅值在1.4m,以简谐波的形式变化。与图2(b) 不规则波下的运动响应比较可得,不规则波下的垂荡运动平均位移为-3m,幅值相对规则波的幅值稍小,平稳后最大幅值为0.9m,但是变化不均匀;规则波下的纵荡位移和不规则波下的纵荡位移都在20m左右,但是不规则波下的纵荡运动幅值较大,稳定性差;规则波作用下的平台纵摇角度最后稳定在-2.6°左右,而不规则波下的纵摇角度在-4.7°-0.1°之间以简谐波的形式变化。
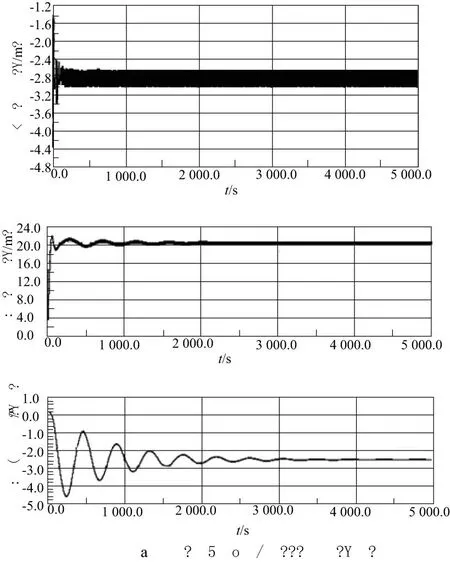

图2 不同波浪下的平台运动响应时程曲线
4.2 规则波与不规则波对平台(系泊缆有预紧力)的影响研究
对每根系泊缆施加5.5×106N的预紧力,相同的风、浪作用下平台对规则波和不规则波的响应如图3(a)、图3(b)所示。规则波下带有施加预紧力的系泊缆的平台的垂荡平均幅值在0.5m左右,不规则波下带有加预紧力的系泊缆的平台的垂荡位移在-4.1m左右,但是运动幅值变化相对较大;规则波下的纵荡位移在7.7m左右,不规则波下的纵荡位移在8m左右,不规则波下的纵荡运动幅值较大,稳定性差;规则波作用下的平台纵摇角度最后稳定在-2.3°左右,而不规则波下的纵摇角度在-4.6°~0.1°之间以简谐波的形式变化。


图3 不同波浪下的平台运动响应时程曲线
4.3 带预紧力的系泊缆对平台的影响研究
由图2(a)规则波下的平台运动响应时程曲线和图3(a)规则波下的平台运动响应(系泊缆预张紧)时程曲线比较可得,带有预张紧系泊缆平台的垂荡平均幅值较小,纵荡位移和纵摇都较小;图2(b)规则波下的平台运动响应时程曲线和图3(b)不规则波下的平台运动响应(系泊缆预张紧)时程曲线比较与规则波相似,由此可得,带有预紧力的系泊缆对平台的稳定性影响更大,尤其是在限制平台的纵荡运动方面尤为突出。
5结果分析与讨论
建立1200m水深锚泊系统水动力模型,采用中国船级社《海上移动平台入级与建造规范》的设计载荷进行设计与分析,综合风、浪、流的联合作用对半潜式海洋钻井平台进行锚泊系统时域耦合分析。分析中考虑了在相同的风、浪、流以及系泊缆预紧力的影响因素,得到以下结论:
1) 三维水动力时域耦合分析能够充分考虑系泊缆和浮体之间的相互影响,实时分析浮体在风、浪、流联合作用下所承受的弯矩、剪力和扭矩,实时反映平台的运动响应。
2) 在同等波高、频率的规则波和不规则波下,半潜式平台的运动响应均满足设计及规范要求,并且在规则波作用下运动相对平稳,符合运动趋势。
3) 在相同的风、浪、流联合作用下,通过对平台(系泊缆有无预紧力)对比分析,带有预紧力的系泊缆能明显抑制平台的运动,尤其是半潜式平台的纵荡响应,即可以通过人为的增加平台阻尼来限制半潜式平台的定位精度,对深水半潜式海洋钻井平台的耐波性设计具有指导意义。
参考文献:
[1] John F.On the motions of floating bodies:II[J].Comm. Pure Appl.Math,1950,3:45-101.
[2] Wu S.The motions and internal force8 of a moored semi-sub-mersible in regular waves[J].Ocean Engineering,1997,24(7):593-603.
[3] 孙金丽,张慧池,汤小霞,等. 波浪作用下锚泊系统动力响应的数值模拟[C]. //中国造船工程学会近海工程学术委员会2007年度海洋工程学术会议论文集. 2007:343-351.
[4] 周素莲,聂武,白勇,等. 深水半潜式平台系泊系统设计研究[J]. 船舶力学,2010,14(5):495-502. DOI:10.3969/j.issn.1007-7294.2010.05.007.
[5] 翟钢军,唐东洋,刘琨,等. 风浪联合作用下深水半潜式平台运动响应模型试验研究[J]. 中国海洋平台,2011,26(6):43-48.DOI:10.3969/j.issn.1001-4500.2011.06.010.
[6] 郝春玲,滕斌. 不均匀可拉伸单锚链系统的静力分析[J]. 中国海洋平台,2003,04:18-21.
[7] Ractliffe A.F.The validity of quasi-static and approximate figuree in the context of cable and flexible riser dynamics.BOSS,1985.
[8] Korkut M D and Hebert E J.Some notes on static anchor chin curves[C]. OTC,1160,1970,4.

Motion Response Research on 1200 m-deepwater Semi-submersible Drilling Platform
QIN Gang1,LI Ya-nan2,TANG Wen-xian2, ZHANG Jian2, DING Hao2,ZHANG Zong-zheng2
(1. Wuhan Marine Machinery Co., Ltd., Wuhan 430084, China;
2. School of mechanical engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
Abstract:Based on the design requirements of the China Classification Society“maritime mobile platform classification and construction specifications”,the structure of the 1200m-deepwater semi-submersible drilling platform is designed. The load classification of the marine environment of the target platform is analyzed. Considering the combined effects from wind, wave and flow, the time-domain coupled analysis on the mooring system of the semi-submersible platform is carried out. The motion response of the platform under regular wave and irregular wave is studied. The influence of mooring-line pretension force on platform motion is analyzed. The results show that the mooring-line with pretension force can obviously inhibit the platform motion, that is, the positioning accuracy of the semi-submersible platform can be controlled by artificially increasing platform damping. It provides a significant guidance for the seakeeping design of deepwater semi-submersible drilling platform.
Keywords:deepwater semi-submersible drilling platform; time domain coupled; motion response; pretension force; seakeeping
中图分类号:P75
文献标志码:A
文章编号:1671-5276(2015)02-0086-04
作者简介:覃刚(1963-),男,湖北宜昌人,高级工程师,博士,研究方向为数字化设计。
基金项目:2013年江苏省研究生培养创新工程(CXLX13702)
收稿日期:2014-11-04 2014-11-01