
海战潜艇兵力作战任务聚合、解聚与重构实现*
2015-02-22 05:48刘剑薛昌友孙珠峰
火力与指挥控制 2015年1期
刘剑,薛昌友,孙珠峰
(海军潜艇学院,山东青岛266071)
海战潜艇兵力作战任务聚合、解聚与重构实现*
刘剑,薛昌友,孙珠峰
(海军潜艇学院,山东青岛266071)
根据海战仿真对潜艇作战仿真的多分辨率需求,采用聚合与解聚的方法对潜艇智能兵力作战行为模型进行层次划分和结构化设计,利用J2EE/EJB组件建模技术构建了潜艇智能兵力作战行为仿真组件模型,通过行为决策模型构建和多分辨率接口设计,对兵力作战任务进行解聚和聚合,仿真不同分辨率下的作战任务行为和作战指标,并通过任务行为决策控制参数调整实现兵力作战行为重构,满足了系统对智能兵力作战行为多分辨率建模和战法战术验证的功能需求,并有效提高了模型利用效率和可重用性。
聚合与解聚,多分辨率,潜艇,仿真,组件
0 引言
高技术海战中潜艇兵力的作战任务和样式正从以往的单一化和简单化向多样化和复杂化的方向发展,由此对潜艇作战行为仿真提出了新需求:仿真应具有不同分辨率,满足战术或战役仿真推演需要;行为模型可重用,满足仿真系统可扩展性需要。以往仿真系统中对潜艇智能兵力作战任务的固定硬编码的方法已经难以满足要求,而近期一些研究利用MSM和多分辨率建模技术的作战仿真研究取得了一定进展[1-2],但是仍然存在几个问题,一是在模型仿真工程化研究上还不足;二是专注于聚合级实体的多分辨率建模,对兵力任务行为多分辨率建模研究相对较少;三是潜艇兵力作战任务仿真的领域特殊性增加了兵力任务多分辨率建模的难度。对此,采用组件化建模方法对潜艇智能兵力作战行为模型进行了合理划分和设计,构建了兵力作战行为的组件化模型,实现了潜艇智能兵力作战任务的有效聚合、解聚与重构。
1 兵力作战行为仿真聚合、解聚与重构的概念
海战仿真通常包括战术仿真和战役仿真两个层级,潜艇战和反潜战通常以战术仿真层级表现兵力作战行为,其仿真粒度细分辨率高;而潜艇、舰艇等多兵力联合作战战役仿真的仿真粒度和分辨率相对较低,也可以根据具体仿真任务需求动态调整。因此,对海战潜艇作战行为进行多分辨率建模,以响应系统不同仿真分辨率需求。目前多分辨率仿真建模的方法有优化选择法、视点选择法、聚合解聚法、多重表示建模法、IHVR法、替代子模型法等几种[3]。聚合解聚法(Aggregation-Disaggregation)由于其思路直观,易于理解,比较符合军事人员的思维方式的特点,可用于潜艇兵力作战行为仿真的多分辨率建模。
兵力层次的聚合是把若干个体综合成能表示这些个体总和的综合体,解聚是通过计算相对应原子实体的初始状态来把聚合实体变成原子实体的过程[4];而对于潜艇智能兵力作战行为任务的聚合与解聚,聚合指从兵力最底层不可再分的任务行为出发,如机动、武器发射、传感器探测等任务行为,构建成更高一层的阶段性任务行为,如鱼雷攻击、导弹攻击等,而在此基础上还可以进一步将兵力任务行为聚合成更高一层的使命层行为,如搜索攻击某编队目标,布雷,输送特种作战人员等。与之相对应,任务解聚就是根据从兵力的顶层使命出发,在仿真周期执行时,将其分解成更为底层,粒度更细的下一层任务行为;而兵力任务的重构,则是指在兵力各种底层和阶段行为基础上,通过对行为决策运行参数的动态调整,有针对性地行为对兵力行为组合与重组,并重构出能满足未来作战任务形式发展和各种不同仿真需求的高层次任务行为,如图1所示。
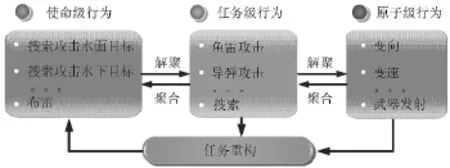
图1 潜艇智能兵力作战行为聚合、解聚与重构说明
2 兵力任务层次化设计与组件模型
2.1 潜艇智能兵力作战任务行为层次划分
兵力的作战任务是对军事活动的一种描述,由于上级或高层给出的往往是宏观概要任务。如果要模拟,必须对宏观的任务进行具体地分解,直到有模拟实体可执行的程度,这就是兵力任务解聚的过程[5]。因此,兵力作战任务层次划分和分解对于聚合作战模型特别重要。
按照任务聚合与解聚的思想,潜艇智能兵力作战任务行为模型按照军事作战和工程仿真实际可以划分为使命级行为、任务级行为和原子级行为三种。使命级行为指的是兵力受领的上级任务,这种任务通常针对军事作战实际,是一种宏观层面任务;任务级行为指的是使命级行为按照军事作战实际执行,可以划分成的阶段性任务行为;原子级行为指的是任务级行为下相对独立不可再分的动作行为,往往具有不可再分的粒度,智能兵力依据上层行为决策所确定的调度依序执行各种底层原子级行为,进而实现智能兵力的复杂作战行为仿真。
潜艇智能兵力作战行为的层次化模型结构划分,便于对兵力任务行为进行模块化的优化设计,完成智能兵力作战行为的聚合和解聚,并且通过各种行为模型和决策模型的接口设计,进一步完成对智能兵力作战行为的重构,这实际上就是一种组件化建模的思想。由于组件技术EJB(Enterprise Java Beans)软件设计模式所提出的模块化建模的思想,使得复杂的多层应用系统开发变得容易[6]。
2.2 潜艇智能兵力任务行为组件结构及其接口设计
根据潜艇智能兵力任务行为的层次化结构,可以将各层级行为设计为EJB中的会话Bean形式。其中智能兵力的任务级行为和使命级行为设计为EJB中的有状态会话Bean的形式,从而可以将任务行为的各种属性和特点能在服务器端长久保持状态,保存仿真过程中的各类历史数据供本组件或其他组件引用,并根据所保持的有状态对下一仿真步长时的组件状态进行递推;原子级行为大多设计为EJB中的无状态会话Bean的形式,可以为海战仿真中的潜艇作战仿真模型组件提供无状态的业务逻辑服务,这些服务在仿真调用过程中不需要保存任何数据状态,EJB容器可根据仿真对象提出的调用请求动态生成和注销可重用的无状态会话组件,从而能够有效减小系统资源。
EJB技术的一个重要特点是EJB组件可以通过接口的重新组合来表现新的业务属性[7],这一特点确保了海战仿真模型组件能够依靠组件内部不同接口的组合使行为组件模型表现不同作战行为。
下页图2中潜艇智能兵力要想完成赋予任务,除了任务行为模型组件外,还需要一些底层模型的支持,例如平台运动模型、传感器探测模型等等,底层模型根据原子级行为的输入控制参数,在数据库支持下,根据兵力战场环境特性和平台武器物理特性完成兵力的平台运动、传感器探测、武器和对抗器材弹道仿真,从而表现兵力的物理和环境模型的仿真细节。由于底层支持模型包含了多个组件模型,通常以包的形式表示为多个组件的组合,而大气环境和水声环境模型根据在数据库输入数据,仿真实现兵力作战的环境特性,计算包括水声传播损失、电磁环境因子等数据,表现出兵力的环境模型特性。在潜艇智能兵力作战行为模型组件设计中,组件从左至右、从顶层行为组件到底层行为组件解聚的过程,也正是兵力作战从信息流到能量流的传递过程。
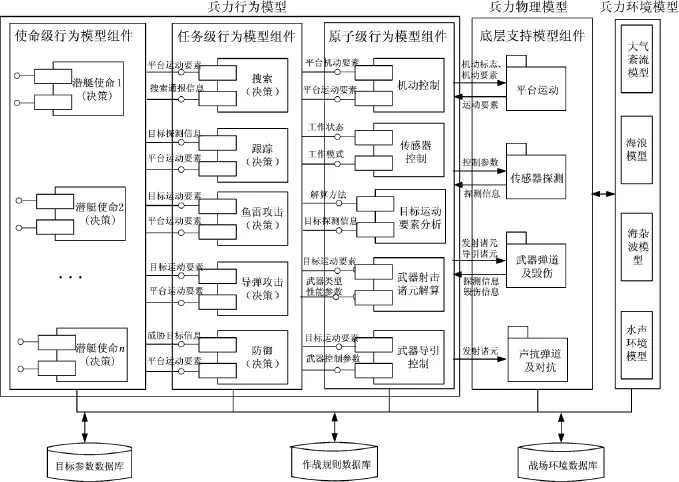
图2 潜艇智能兵力行为模型组件结构级接口关系图
根据海战仿真的战术和战役仿真推演需要,潜艇智能兵力应能灵活动态地表现出兵力不同粒度的行为,既兵力作战行为应具有不同分辨率。因此,兵力行为模型组件能响应不同仿真分辨率的需求,动态表现出不同粒度的兵力复杂作战行为,这一点在兵力使命级行为模型组件中得到体现。
2.2.1 使命级行为模型组件
2.2.1.1 功能
使命级行为模型组件功能任务是在低分辨率下根据战场态势和所计算的预期武备发射类型和数量,计算潜艇使用搜索发现概率、武器对目标的毁伤概率以及各任务所需期望时间等各型指标;而在高分辨率下组件对兵力使命级任务行为解聚,进行战术级海战潜艇作战仿真推演,展现潜艇兵力的细粒度作战行为,例如潜艇战和反潜战。
2.2.1.2 多分辨率接口设计
使命级行为模型组件是兵力各层级行为模型组件中唯一具有不同分辨率接口的组件,这是因为在低分辨率情况下,战役级海战仿真推演对于单艘潜艇兵力的仿真需求,通常表现为兵力提供对目标的毁伤概率、对目标毁伤达成时间、防御成功概率等粒度相对较粗的数据,而不需要细粒度行为仿真。这些关键数据需要依据完整的作战态势信息才能计算,将其放入使命级行为组件中,不仅能够方便数据输入,同时能有效地减少通信负载,降低资源损耗和程序复杂度,如图3所示:
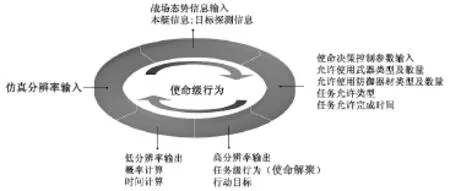
图3 使命级行为模型组件接口图
战场态势信息输入接口:该信息为包含了本艇信息和目标探测信息的复杂数据结构,用于使命级行为组件任务解析和指标计算。
仿真分辨率输入接口:分辨率分为高分辨率和低分辨率两种,组件根据输入的分辨率驱动模型组件执行不同粒度的作战任务行为。
使命决策控制参数输入接口:该信息包含了该使命下兵力允许使用武备及任务执行信息的复杂数据,兵力正式通过决策控制参数的改变和调整,进而完成兵力使命级行为的重构,即兵力能够表现出不同类型、可控甚至新型的使命级行为。
低分辨率行为输出接口:使命级行为组件根据输入信息计算各种任务执行指标,包括任务的各种概率和时间等指标。
高分辨率行为输出接口:使命级行为组件根据输入信息进行任务行为分解,输出当前仿真时刻下兵力应执行的任务级行为,以及该任务级行为下的行动目标批号,完成使命级行为的解聚。
2.2.1.3 多分辨率表示冲突
(1)并发交互冲突解决
由于使命级行为组件具有不同分辨率的接口,需要考虑当组件两种接口对外输出信息时是否会存在冲突的问题,这一类的冲突问题也称之为“并发交互冲突”[8-9]。使命级行为模型组件采用面向对象的建模方法和组件化建模技术,在高分辨率仿真下组件行为决策模型将使命级行为解聚为任务级行为,并在该分辨率下触发对下一层任务级行为组件调用,两种层次行为模型的业务逻辑一致、不冲突且是一种上下包含的关系;在低分辨率仿真下,使命级行为模型组件依据战场信息进行任务指标计算,而与具体的行为细节无关,这样的一种模型设计可以使高分辨率模型和低分辨率模型在同一个指挥协调机制下运行,并在保持一定自主性条件下服从使命级行为决策的统一调度,避免了两种分辨率接口输出内容的重叠和交互冲突的出现。但是需要考虑的是,高分辨率仿真运行中下一层行为模型组件调用所导致的战场态势变化对低分辨率输出任务行为指标的影响,例如高分辨率仿真运行中,兵力在执行鱼雷攻击任务级行为时发射鱼雷武器,如果此时仿真分辨率转换为低分辨率,则在低分辨率运行下兵力鱼雷攻击任务指标计算的影响。
2.2.1.4 低分别率任务指标输出
任务指标输出信息为潜艇当前任务的关键指标信息,例如潜艇执行鱼雷攻击任务时,任务指标输出信息包含潜艇鱼雷攻击任务的命中概率和攻击时间指标,用于战场效能评估计算和指挥员干预操作。指标计算来源依据解析计算或者仿真数据,例如潜艇采用直航鱼雷射击时,其对目标的命中概率可以解析计算得出[10],根据该指标在仿真时可进一步抽样判断攻击目标的毁伤状态,为战役仿真推演在线统计和效能评估提供依据。
2.2.1.5 高分辨率决策输出
决策输出信息为当前作战态势下的兵力作战任务信息,其过程是使命级行为组件根据输入信息和行为决策知识,按照一定时序解聚该使命,输出使命下的任务级行为以及相应目标信息。例如潜艇当前为搜索攻击敌水面舰艇使命级行为时,其决策输出包括使命下所解聚的时序变化的搜索、跟踪或鱼雷攻击等任务行为信息,从而不断适应战场态势的变化,表现出兵力自主作战行为的智能性和细粒度。
2.2.2 任务级行为模型组件
任务级行为模型组件采用EJB中的会话Bean形式,仅在高分辨率下仿真运行,不具有低分辨率接口。该级行为模型组件可以被兵力不同的使命级行为组件所复用,是智能兵力行为模型组件中重要的组成部分,其主要功能是:接收使命级行为组件输出的使命任务解聚出的任务信息,按照该任务级行为的决策知识,根据时间或战术知识依序将本级任务级行为解聚为不同的原子级行为,表现该作战任务级行为的全过程。任务级行为模型组件的接口包括:任务执行输入接口(任务级行为的名称,行为针对的目标对象)。
任务决策控制参数输入接口:该信息包含了该任务下兵力使用武备、任务执行样式等任务执行信息的复杂数据,可以通过决策控制参数的改变和调整完成任务级行为的重构,例如对于搜索任务级行为设置输入不同的搜索方式,表现不同的搜索机动样式;或者设置传感器及武器的使用方式,控制兵力攻击性的任务级行为执行。
战场态势信息输入接口:本艇信息、目标信息、环境信息,用于任务行为决策计算。
行为输出接口:根据输入信息对本任务级行为分解,输出当前仿真时刻下兵力应执行的原子级任务行为以及该原子行为针对的目标信息,完成本任务级行为的解聚。
2.2.3 原子级行为模型组件
由于智能兵力复杂作战行为的构成实质上就是原子级任务行为的不同时序组合,因此,原子级任务行为组件是兵力作战各层级行为组件的基础。原子级任务行为组件中,兵力的机动控制、传感器控制其模型相对简单,例如机动控制组件主要完成兵力机动控制要素的计算,并将控制要素传送给底层的平台机动模型组件,其通常为EJB无状态会话Bean的形式,用于资源复用,提高系统运行效率;而兵力的目标运动要素解算,武器射击诸元解算原子级行为组件其模型相对复杂,但是功能相对单一,不需要再分解成更细粒度的行为组件,因此,仍然设计为独立的原子级行为组件,并且这些组件由于需要保持过程数据,通常采用EJB有状态会话Bean形式。
2.3 兵力行为底层支撑组件
潜艇兵力作战行为的智能性依赖于兵力各层级任务行为组件设计,而兵力作战行为的有效性和复杂度却取决于智能兵力行为仿真的底层支持组件,这些组件与兵力行为组件设计上虽然相对独立,但却是兵力任务行为组件的有利支撑和重要补充,例如对于平台运动组件,该组件功能是对潜艇智能兵力可能的作战样式和作战过程进行动态仿真描述,全面分析潜艇作战过程的机动方法,并针对各种机动方法进行平台物理特性的描述,以实现相应的运动仿真功能。主要包括对潜艇匀速运动功能、变速运动功能(速度矢量方向、速度大小)、潜浮运动功能、受损后运动状态的改变、模拟兵力在各种海洋环境下(不同流向、流速、风浪影响)的航行姿态(横摇、纵摇、纵倾等),为系统提供视景仿真所需要的相关数据。对于传感器探测组件、武器弹道及毁伤组件、水声对抗器材弹道及对抗组件的功能,是对传感器探测、武器弹道与对抗过程以及水声对抗器材弹道与对抗过程进行仿真实现,受篇幅所限,不再进行赘述。
3 兵力作战任务决策模型的可重构设计
潜艇智能兵力的使命级行为与任务级行为的解聚依靠组件中作战任务决策模型完成,因此,智能兵力的作战任务决策模型包含了使命级和任务级行为决策模型两种,其功能是对本层级作战行为进行分解与规划,并根据战场信息进行态势评估、任务评估和任务再规划,最终将本层级作战行为解聚成下一层级的作战任务行为。作战任务决策模型的工作过程包含了正向和反向信息反馈的环节,即通过任务决策控制参数的调整,有意识地控制兵力使用的武器类型、作战样式、作战时间,重构兵力的本层级作战任务行为,这是正反馈过程;而解聚输出下一层的作战行为的任务执行信息,又作为本层级作战行为进行任务再规划的反向反馈过程,从而使得兵力能够不断适应战场态势的变化调整作战行为,表现出兵力决策的智能性,如图4所示:
兵力的使命级行为任务决策模型和任务级行为决策模型输入的都是本层级的任务行为信息,输出的是解聚而成的下一层作战任务行为,任务信息包括分配给战术层的任务信息、协调动作信息和数据综合处理信息。因此,两种模型具有相似的构成和工作过程,所不同的是使命级行为决策的知识是全局的任务决策知识,控制下一层任务级行为的转换,而任务级行为决策的知识是本任务的决策知识,控制下一层原子级行为的转换,从而能够有效减少决策知识的搜索匹配量,而不需要每周期通过全局的决策知识匹配同时控制不同层级的作战行为,有效提高了决策的知识效率。这样的匹配控制通过任务决策的任务解聚匹配器实现,因此,任务的解聚匹配成为作战任务决策模型的核心和关键。匹配通过模板匹配的方法,匹配规则实现采用了Lua脚本语言,这是因为Lua是一种易于扩展的语言,也是一种易整合语言,与C++语言互补,特别适合组件建模思想,可以将一些已经存在的高级组件模块化整合在一起实现一个应用软件[11]。
4 兵力聚合、解聚和重构仿真流程与实现
海战仿真中采用Netbeans7.0仿真平台和glassfish3.0的j2ee服务器,构建了海战中潜艇智能兵力作战行为仿真模型组件及其他支撑组件。glassfish作为一个良好的j2ee服务器为系统仿真提供远程注册服务和组件生命周期管理等公共服务,而系统开发的仿真管理组件则从业务逻辑上按照作战流程对系统交战实体和时间推进进行有效管理。当启动仿真系统后,用户可以灵活部署配置潜艇兵力单元,并设置兵力行为决策控制参数和武器装备参数。仿真开始后,潜艇兵力组件接收任务和决策控制输入信息,根据输入的分辨率向客户端反馈高分辨率下的兵力状态、目标和任务执行信息或者低分辨率下的任务指标信息,并可在仿真运行过程中通过控制决策参数调整改变兵力任务执行,对兵力作战行为进行干预控制。
如图5所示,仿真开始前,启动glassfish服务器,打开客户端应用程序,建立与服务器的链接,在客户端应用程序完成兵力配置和任务编辑后,发送兵力初始化消息命令,调用服务器中的相关组件实例,使命级行为组件接收配置的使命任务和任务决策控制参数,对兵力使命级行为解聚或者计算任务指标,任务级行为组件接收使命级行为组件解聚输出的任务级行为信息和任务级行为决策控制参数,将当前任务级行为解聚成原子级行为,生成原子级行为组件实例,原子级行为组件执行输出对兵力的平台、传感器、武器和对抗器材的控制信息,这些控制信息传送给底层支撑组件,底层支撑组件在仿真管理组件的时间步进协调下完成仿真的推演,依序进行仿真推进,从而仿真实现兵力的复杂作战行为。
需要说明的是,系统服务器端部署有前文所述的兵力不同层级的作战行为模型组件、武器和传感器等底层支撑模型组件,作战行为模型和支撑模型组件读取兵力武器装备参数和作战规则知识,实现仿真数据(主要是仿真参数)与仿真模型的分离,从而实现数据的共享[9],并满足仿真用户的查询和调用。
5 结束语
对潜艇智能兵力作战行为进行合理的层次化优化结构设计,采用聚合与解聚的方法,利用j2ee体系结构和组件技术构建了潜艇智能兵力作战行为仿真模型,不仅能够灵活部署兵力仿真单元的各型配置参数,对兵力的作战任务行为进行解聚和聚合,输出不同仿真分辨率下的作战行为和作战指标,响应海战仿真不同仿真分辨率的需求,而且能通过对兵力任务行为决策控制参数的调整,实现兵力作战行为模型和重构,加载军事领域专家设定的不同作战对象战法知识,完成兵力现有和新型战法战术的验证,提高了系统作战仿真多分辨率建模与模型资源可重用性的需求。
[1]华玉光,徐浩军.多分辨率建模航空武器装备体系对抗效能评估[J].火力与指挥控制,2009,34(1):8-10.
[2]王杏林,郭齐胜,丁士拥.任务空间概念模型及其形式化描述[J].系统仿真学报,2003,15(10):30-32.
[3]Liu B H,Huang K D.The Concept and Some Design Issues about Multi-Resolution Modeling in HLA[C]//Shanghai,China:ICSC 2002,2002.
[4]杨立功,郭齐胜.聚合级实体仿真中的若干关键问题分析[J].系统仿真学报,2006,18(2):373-375.
[5]刘宝宏.多分辨率建模的理论与关键技术研究[D].长沙:国防科技大学,2003.
[6]谭铭坚.基于组件技术的快速成型软件系统开发[D].西安:西安科技大学,2007,01.
[7]Inverardi P,Proving S U.Deadlock Freedom Component-Based Porgr Aming[C]//Fundamental Approaches to SoftwareEngieneering,4thInternaitonalConeference,FASE2001.SPirnger-verlag Berlin Heidelbegr,2001.
[8]Ntrajan A.Consistency Maintenance in Concurrent Representation[D].Doctor Dissertation of University of Virginia,2000.
[9]刘宝宏,黄柯棣.分布交互式仿真中的多分辨率模型并发运行问题研究[J].系统仿真学报,2007,19(5): 1038-1041.
[10]李长军,王顺意.一种潜艇直航鱼雷攻击低速水面舰艇的方法[J].鱼雷技术,2011,19(5):10-13.
[11]黄震宇,杨任农,白娟,等.空战训练中虚实兵力对抗系统设计[J].计算机工程与科学,2011,36(5):41-44.
Research of Submarine CGF Behavior Aggregation Disaggregation and Reconstruction in Sea Battle
LIU Jian,XUE Chang-you,SUN Zhu-feng
(Navy Submarine College,Qingdao 266071,China)
According to the need of different simulation scale,the hierarchy design of submarine computer generated force behavior it given by the method of aggregation and disaggregation,then the behavior model of the submarine force using J2EE/EJB component is constructed.Moreover the simulation of submarine force operation could be aggregated or disaggregated,and the behavior of different simulation scale and operation index could be obtained by the design of decision making model and interface as the behavior could also be reconstructed through the adjustment of the parameter of decision making.So it meats the need of different scale for sea battle simulation and the validity for tactics and improve the efficiency and reusability of the model.
aggregation/disaggregation,different scale,submarine,simulation,component
E927
A
1002-0640(2015)01-0131-06
2013-10-15
2014-02-07
军队重点基金资助项目(2009SY3301002)
刘剑(1980-),男,湖北黄石人,博士。研究方向:潜艇作战仿真与模拟。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
小哥白尼(军事科学)(2022年1期)2022-04-26
小哥白尼(军事科学)(2021年6期)2021-11-02
小哥白尼(军事科学)(2021年12期)2021-03-29
小哥白尼(军事科学)(2021年11期)2021-02-28
西部论丛(2018年12期)2018-11-28
家庭影院技术(2018年9期)2018-11-02
兵器装备工程学报(2018年1期)2018-03-01
指挥与控制学报(2017年1期)2018-01-18
军事运筹与系统工程(2016年4期)2016-07-10
