
基于模糊控制的全局滑模在机器人系统中的应用
2015-02-20 07:27张丰
沈阳理工大学学报 2015年4期
张 丰
(绥化学院 信息工程学院,黑龙江 绥化 152061)
基于模糊控制的全局滑模在机器人系统中的应用
张 丰
(绥化学院 信息工程学院,黑龙江 绥化 152061)
由于全局滑模控制方法对控制过程具有全程鲁棒性,因此这种方法常用于消除摩擦迟滞现象。但在传统方法的控制函数中,用于补偿摩擦迟滞的增益只取了上界,这样容易使输入力矩产生抖振现象。通过模糊控制自适应调节切换增益的值,对于减小抖振现象有很好的效果。将此算法应用到机器人动力学模型中进行仿真验证,仿真结果证明了该方法的可行性。
全局滑模;模糊控制;抖振
由于机械传动过程中运动部件相互配合所造成的摩擦,或者机械加工、装备上的缺陷,必然存在摩擦现象,进而影响系统的品质,严重会使系统出现自激振荡或者发散现象[1]。因此降低摩擦因素的影响是很有必要的。很多专家学者对解决摩擦因素造成的影响提出了很多新思路、新方法。由于滑模变结构控制自身的特点,鲁棒性较好,被越来越广泛的应用于控制系统中。其中全局滑模控制方法对降低摩擦因素的影响有较好的效果。
传统的全局滑模在有其优点的同时也存在很大弊端,虽然能够过滤摩擦因素的影响,却增大了系统的抖振现象。本文在全局滑模的基础上进行改进,消除了滑模控制中的趋近阶段,并且通过模糊控制[2]器来确定切换增益,对抑制控制过程中的抖振现象具有明显的效果。
1 设计全局滑模变结构控制器
全局滑模控制器的优点在于,它能使系统不必经过趋近过程,直接处于滑动状态。设系统的状态向量是xd,系统的误差e=xd-x,切换函数形式为[3]
s(x,t)=e+ce-F(t),c>0
(1)
F(t)函数设计的目的是使全局滑动模态得以实现,F(t)=s(0)exp(-λt),λ>0。s(0)为初始时刻的s(t)。
(2)

稳定性[5]的证明:
Lyapunov函数定义为

(3)
将式(2)代入式(3)得


(4)
由此证明,该滑模控制器存在且稳定。
测量并记录两组患者HbAlc(糖化血红蛋白)、FPG(空腹血糖)、2 hPG(餐后 2 h 血糖)[3]。
在式(2)中,K(t)为误差上限,因此在控制过程中会造成抖振现象。在新控制器的设计中,将K(t)的取值通过模糊控制进行自适应调节。控制系统结构图如图1所示。
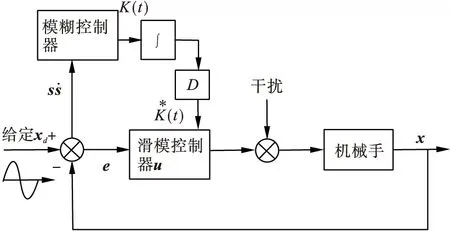
图1 控制系统结构图
对K(t)的最大值进行估计,取其积分:
(5)
则式(2)变为
(6)

N={NBNMZOPMPB}
(7)
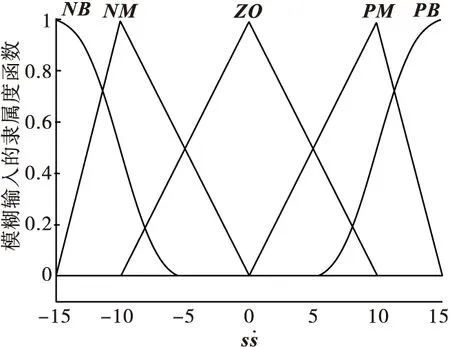
图2 模糊系统输入量的隶属函数
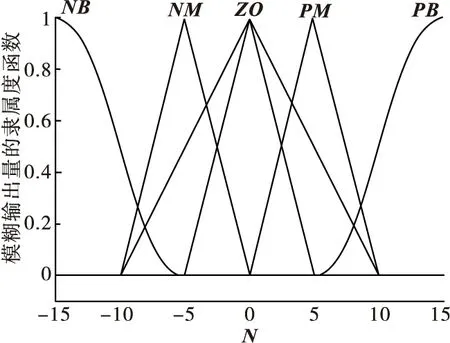
图3 模糊系统输出量的隶属函数
2 机器人摩擦模型的建立
LuGre摩擦模型:
(8)
式中:E(t)为摩擦迟滞;x是系统状态向量;σ0、σ1为动态摩擦因数;α为粘性摩擦系数;M1为库伦摩擦力;M2为静摩擦力;υ为切换速度。
根据文献[7],只考虑不确定因素影响时的机器人动力学模型:

(9)


式中:f(x1,x2,t)=(-0.03cos(x1)x2-mglcos(x1))0.1+0.06sin(x1);
g(x1,x2,t)=1/0.1+0.06sin(x1);

3 仿真结果及分析

图4a和图4b分别为采用传统方法和改进后的方法机械手对给定信号的跟踪曲线。
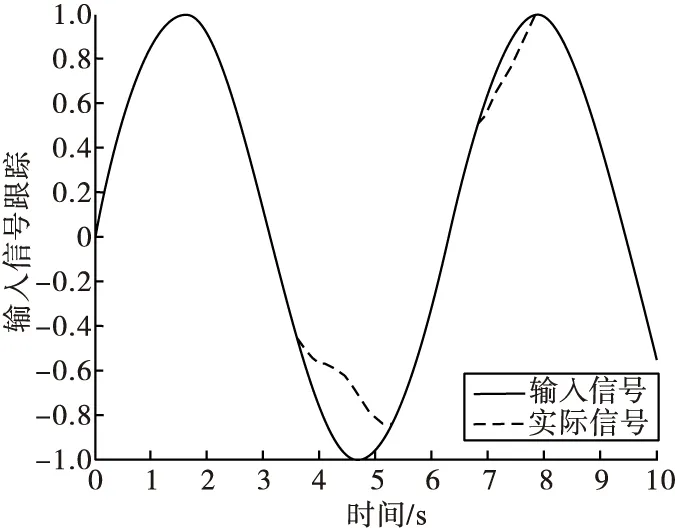
(a)采用传统全局滑模时
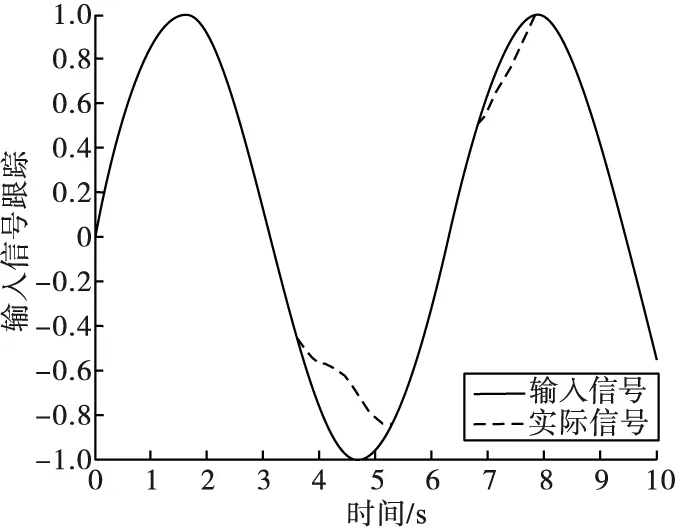
(b)采用改进后的全局滑模时

图5a和图5b分别为采用传统方法和改进后方法的控制律u(即驱动力矩τ)的运动曲线。
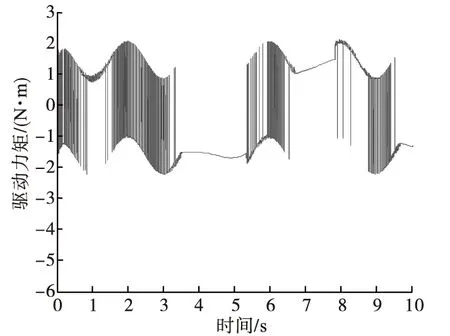
(a)采用传统全局滑模时
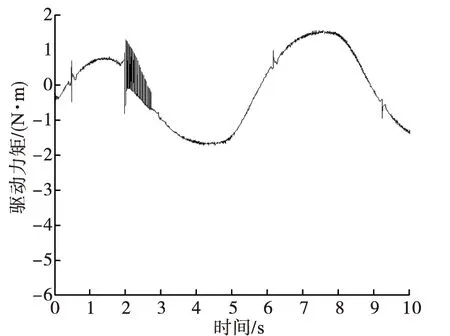
(b)采用改进后的全局滑模时
在图5a中,滑模面参数c=31,λ=10。由于摩擦迟滞的存在,系统的控制律信号具有明显抖动现象。在图5b中,比例系数D=700,c=150,λ=10。从图中可以看出新的控制器设计对摩擦因素具有很好的过滤效果,抖振现象得到控制,但没有完全消除。效果优于传统全局滑模控制。
图6中切换函数s曲线可以看出,全局滑模控制器全程鲁棒性的特点,由于控制系统没有趋近过程,调节时间很短,在0.2s时就进入了控制器的控制阶段。
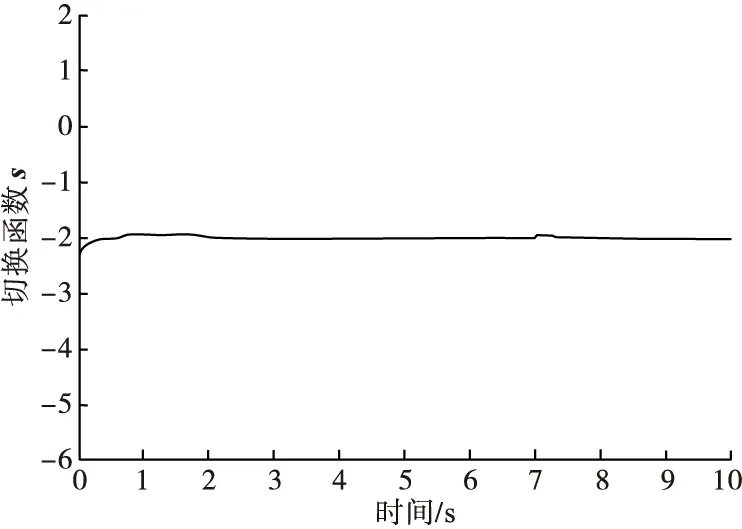
图6 切换函数s
4 结束语
采用模糊控制方法改变了切换增益的值,对摩擦迟滞现象仍然具有过滤作用的同时,减小了机器人摩擦系统中控制信号的抖振现象,对信号跟踪稳定。虽然抖振现象明显减小,但并没有完全消除,仍需进一步研究。
[1]李春涛,谭永红.迟滞非线性系统的建模与控制[J].桂林电子工业学院学报,2005,24(1):12-24.
[2]张昌凡.滑模变结构的智能控制理论与应用研究[M].北京:科学教育出版社,2004.
[3]Lu Y S,Chen J S.Design of a global sliding-mode controller for a motor drive withbounded control[J].International Journal of Control,1995,62(5):1001-1019.
[4]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.
[5]王丰尧.滑模变结构控制[M].北京:机械工业出版社,2001.
[6]Jeong Ju Choi,Seong Ik Han,Jong Shik Kim.Development of a novel dynamic friction model and precise tracking control using adaptive back-stepping sliding modecontroller[J].Mechatronics,2006,62(5):97-104.
[7]熊有伦.机器人学[M].北京:机械工业出版社,1993:1-4,139-143.
[8]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
(责任编辑:马金发)
The Application of Global Sliding Mode Control Based on the Fuzzy Controller in Robot System
ZHANG Feng
(Suihua College,Suihua 152061,China)
The Global Sliding mode has Robust Features in the whole control process,so it is used to eliminate the friction.But the gain in the controller just takes the upper limit,so it can cause the chattering.A new method based on fuzzy controllor is applied to reduce the chattering.Simulation and experimental results in the Robot’s friction system show that the proposed method can reduce chattering effectively.
global sliding;fuzzy controllor;chattering
2015-03-05
张丰(1982—),女,助教,研究方向:控制理论及其应用,计算机控制系统.
1003-1251(2015)04-0071-04
TP273
A
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
金桥(2018年4期)2018-09-26
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
