蛇形机动目标视线角滤波算法研究
2015-02-18 03:56张晓宇陈营营李英兰
应用科技 2015年6期
张晓宇,陈营营,李英兰
哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001
蛇形机动目标视线角滤波算法研究
张晓宇,陈营营,李英兰
哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001
摘要:当目标做匀速直线运动时,实现对目标拦截所需的过载较小,此时对视线角的测量精度要求不高;当目标做蛇形(正弦)机动时,为了实现对目标的拦截,需要较大的过载,此时视线角的测量精度对脱靶量的影响很大。为了实现精确制导的要求,需要对视线角信息进行滤波,从而降低噪声的干扰。文中分别采用了α-β滤波和卡尔曼滤波算法实现对视线角信息的滤波,并与无滤波的情况进行了对比,结果表明在参数选择合适的情况下α-β滤波比卡尔曼滤波具有更好的降噪效果,但是在近距离内两者的滤波效果均变差,使得两者在减小脱靶量方面的效果几乎一致。
关键词:蛇形机动;视线角;噪声;α-β滤波;卡尔曼滤波

张晓宇(1971-), 男, 博士生导师.
随着现代化武器的高速发展,目标机动方式越来越复杂多样,蛇形机动[1-3]方式的出现使得对目标的拦截难度大大提升。当前阶段,在导弹拦截的末制导段,主要通过导引头获取弹目之间的相对速率、视线角及视线角速率信息对导弹进行制导,实现对目标的精确打击。视线角速率通常都很小,但是通过导引头所测得的视线角速率信息通常都含有一定的噪声,在目标匀速运动的情况下,噪声对拦截精度通常影响不大,但是当目标做蛇形机动时,噪声的影响会大大降低拦截的精度,这就需要对视线角及视线角速率信息进行滤波,降低噪声的干扰,提高拦截的精度。
在对蛇形机动目标进行拦截时视线角速率的变化率很小,在工程上通常近似认为视线角速率的变化率为零,并将目标机动引起的视线角速率的变化看成一种干扰。现有的滤波算法种类很多,如α-β滤波[4-6]、α-β-γ滤波、卡尔曼滤波[7-9]、扩展卡尔曼滤波、无迹卡尔曼滤波、两步滤波、粒子滤波等。针对视线角速率近似不变的情况,可以采用α-β滤波和卡尔曼滤波算法对视线角信息进行滤波。
1视线角数学模型

(1)
其中

观测方程为

(2)
其中,
2α-β滤波

预测方程为
增益矩阵为
量测新息为

状态估计
式中:T为采样周期,令
(3)
式中:σw为过程噪声标准差;σv为测量噪声标准差;λ被称为目标机动指数。参数α和β是由目标机动参数λ决定的,其关系如下
(4)
在实际系统中,过程噪声标准差通常是未知的,故不能通过式(3)、(4)计算出滤波器的增益参数α和β,Kalata在文献[4]中证明α和β存在如下最优关系式
如果确定了参数α,那么也就确定了参数β的最优值。
3卡尔曼滤波


给定初始条件:

状态一步预测

(5)
状态误差协方差一步预测
(6)
滤波增益
(7)
状态更新


(8)
状态误差协方差更新

(9)
式(5)~(9)即为卡尔曼滤波基本方程。
4仿真结果及分析
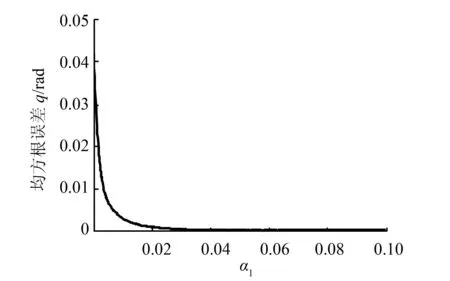
图1 qε估计的均方根误差随参数α1的变化曲线

图2 qβ估计的均方根误差随参数α2的变化曲线
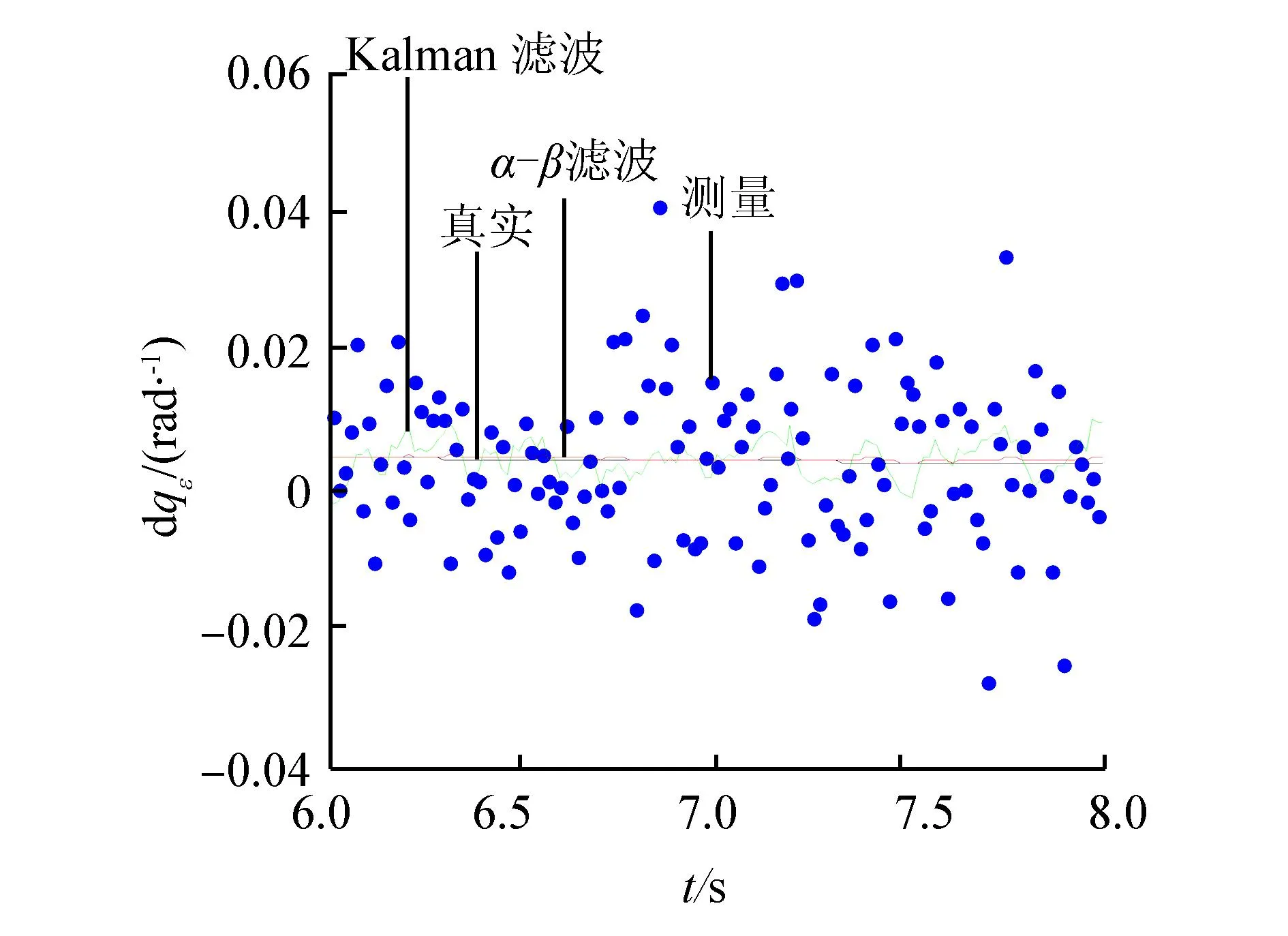
选取一组估计误差较小的参数为α1=0.05,α2=0.06。以视线角信息实际值作为比例导引律输入,分别采用α-β滤波算法与KF算法进行滤波, 仿真结果如图3~7。图4~7为滤波结果在第6~8 s的放大图,可以看出,视线角信息的直接测量结果误差比较大,采用滤波算法后能大大减小测量误差,且α-β滤波算法的估计误差比KF算法的估计误差更小。采用无滤波、α-β滤波和卡尔曼滤波方式对视线角信息进行处理,进行500次蒙特卡洛仿真,对脱靶量及拦截时间进行统计如表1。
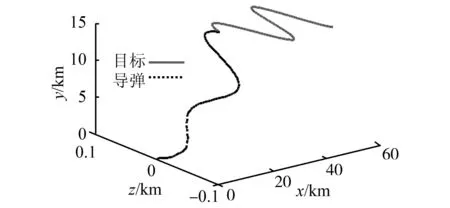
图3 拦截弹和目标的运动轨迹
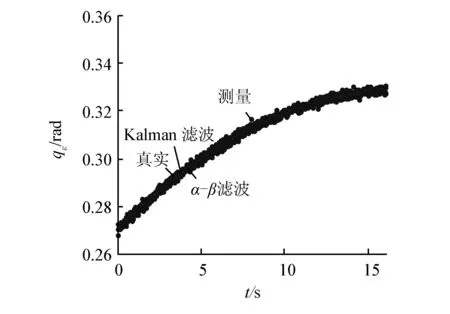
(a)视线倾角滤波曲线
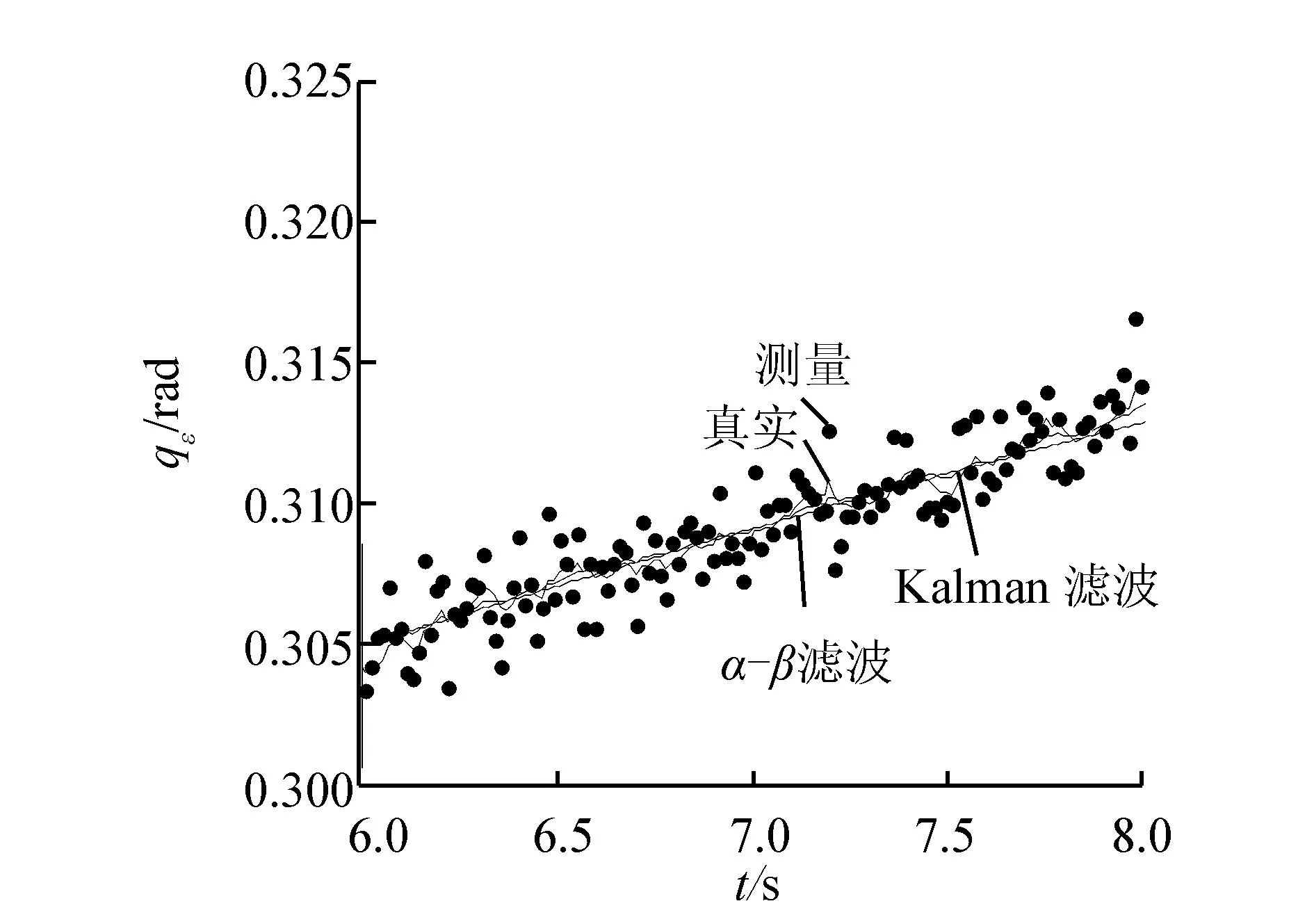
(b) 视线倾角滤波曲线6~8 s放大图图4 视线倾角滤波曲线

(a)视线偏角滤波曲线

(b) 视线偏角滤波曲线6~8 s放大图图5 视线偏角滤波曲线

(a)视线倾角速率变化曲线

(b) 视线倾角速率变化曲线6~8 s放大图图6 视线倾角速率变化曲线
由表1可知,在无滤波情况下脱靶量较大;在采用α-β滤波和卡尔曼滤波进行处理后,脱靶量明显减小,且两者脱靶量相差不大,这主要是因为在弹目相对距离比较小时,卡尔曼滤波效果比α-β滤波好。

(a)视线偏角速率变化曲线
(b)视线偏角速率变化曲线6~8 s放大图 图7 视线偏角速率变化曲线
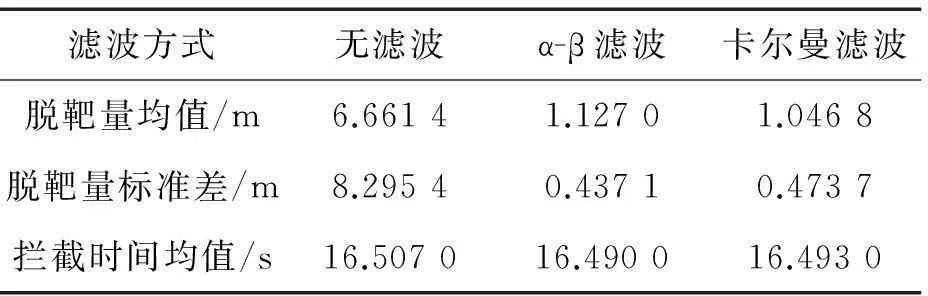
滤波方式无滤波α-β滤波卡尔曼滤波脱靶量均值/m6.66141.12701.0468脱靶量标准差/m8.29540.43710.4737拦截时间均值/s16.507016.490016.4930
5结束语
以比例导引律下拦截蛇形机动目标为例,对α-β滤波算法参数进行选择,然后对比了α-β滤波和卡尔曼滤波估计效果,结果表明在选择了合适参数后,α-β滤波效果比卡尔曼滤波效果好,但采用两者算法对视线角滤波后,均能减小脱靶量并缩短拦截时间,两者脱靶量和拦截时间相差不大。α-β滤波参数是通过多次仿真对数据分析后得到的,如何提高参数的自适应设计、根据α-β滤波器的参数对卡尔曼滤波噪声参数进行设计,有待进一步研究。
参考文献:
[1]OHLMEYER E J. Root-mean-square miss distance of proportional navigation missile against sinusoidal target[J].
Journal of Guidance, Control, and Dynamics, 1996, 19(3): 563-568.
[2]张亮亮, 周峰, 徐彤. 新的“S-蛇形”机动目标模型及跟踪方法研究[J]. 电光与控制, 2012, 19(9): 13-16, 22.
[3]王晓天, 贾宇, 陈方斌. 一种用于“蛇形”机动目标的跟踪方法研究[J]. 应用光学, 2009, 30(1): 65-68.
[4]KALATA P R. The tracking index: a generalized parameter for α-β and α-β-γ target trackers[J]. IEEE Transactions on Aerospace and Electronic Systems, 1984, 20(2): 174-182.
[5]朱薇, 夏传浩. 一种改进的α-β目标跟踪滤波算法[J]. 计算机应用, 2007, 27(8): 2053-2055, 2080.
[6]王豪, 吴向东, 魏明英. 基于α-β滤波算法的目标运动信息滤波与估计[J]. 现代防御技术, 2009, 37(3): 49-51, 63.
[7]KALMAN R E. A new approach to linear filtering and prediction problems[J]. Journal of Basic Engineering, 1960, 82(1): 35-45.
[8]严浙平, 黄宇峰. 基于卡尔曼滤波的动目标预测[J]. 应用科技, 2008, 35(10): 28-32.
[9]刘胜, 张红梅. 最优估计理论[M]. 北京: 科学出版社, 2011.
[10]李新国, 方群. 有翼导弹飞行动力学[M]. 西安: 西北工业大学出版社, 2005: 25-28.
网络出版地址:http://www.cnki.net/kcms/detail/23.1191.U.20151206.1020.020.html
Study of LOS angle filtering algorithm for sinusoidally maneuvering targets
ZHANG Xiaoyu, CHEN Yingying, LI Yinglan
College of Automation, Harbin Engineering University, Harbin 150001, China
Abstract:A small overload is required to intercept a target when it moves in a constant velocity, and the requirement of measuring accuracy is not high. When the target maneuvers sinusoidally, a high overload is required, and the measuring accuracy of line of sight (LOS) angle has a great influence on the miss distance. In order to achieve the precise guidance requirements, filtering of LOS angle information is needed to reduce the measurement noise interference. This paper uses α-β filter and Kalman filter algorithms for LOS angle information filtering, and compares them with the situation with no filtering. It indicates that α-β filter has a better effect than Kalman filter under a preferred group of parameters, but the effect of both filters becomes worse in a close range. It makes the effect of both filters in reducing miss distance almost the same.
Keywords:sinusoidal maneuver; line of sight angle; noise;α-β filter; Kalman filter
通信作者:陈营营, E-mail:chenyingjn@163.com.
作者简介:陈营营(1990-), 女, 硕士研究生;
收稿日期:2015-03-27.网络出版日期:2015-12-06.
中图分类号:U666.1
文献标志码:A
文章编号:1009-671X(2015)06-036-04
doi:10.11991/yykj.201503029
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
劳动保护(2019年3期)2019-05-16
电子制作(2019年23期)2019-02-23
电子制作(2018年16期)2018-09-26
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
噪声与振动控制(2015年4期)2015-01-01