电磁-空气弹簧混合隔振器的设计与仿真
2015-02-16 05:59张锦光宋春生
武汉理工大学学报(信息与管理工程版) 2015年5期
张锦光,陈 娟,周 佳,宋春生
(武汉理工大学 机电工程学院,湖北 武汉 430070)
电磁-空气弹簧混合隔振器的设计与仿真
张锦光,陈 娟,周 佳,宋春生
(武汉理工大学 机电工程学院,湖北 武汉 430070)
针对舰船减振降噪问题,提出了一种由电磁作动器和空气弹簧集成的电磁-空气弹簧混合隔振器,对电磁作动器和空气弹簧进行了参数设计,利用Workbench分析了电磁作动器的作动力,并用ABAQUS分析了空气弹簧承载力;建立了隔振系统控制模型,采用LQR最优控制仿真分析其力传递率,表明电磁作动器有效抑制了空气弹簧的低频共振,空气弹簧有效隔离了高频振动,该混合隔振器融合了两者的优点,并避免了各自的不足。
电磁作动器;空气弹簧;混合隔振器
采用主被动混合隔振技术能有效控制舰船设备传递到基座上的能量[1-3],电磁作动器具有无接触、刚度和阻尼随控制参数的变化可控可调的特点[4-5],是一种较理想的主动隔振器,但单独使用时能耗大。空气弹簧结构尺寸小、固有频率低、承载能力强[6],可应用于舰船,但作为被动隔振器会放大其固有频率的振动。因此研究融合两者优点,同时避免两者缺点的混合隔振技术具有理论价值和工程实际意义。KIM等[7-8]将电磁铁与永磁铁组成的混合作动器集成到空气弹簧内部,不适用于振动较大的隔振应用。DALEY等[9]将由钢弹簧与电磁作动器并联的智能弹簧应用于船舶隔振,但电磁力与电流和气隙呈非线性关系,难以精确控制。何琳等[10]将电磁作动器与空气弹簧并联集成,但不便于主动控制部分的调整及维修。笔者研制了一种电磁-空气弹簧混合隔振器,该隔振器将电磁作动器集成到空气弹簧隔振器内部,具有结构紧凑、承载能力强等特点,能兼顾低频和高频振动隔离,可用于舰船领域的减振降噪。对所设计的隔振器中的电磁作动器和空气弹簧分别进行了参数设计,并对两者垂直方向上的承载能力进行了解析式推导及有限元分析,通过对该隔振器进行控制仿真,获得了较好的隔振效果,为电磁-空气弹簧的进一步研究奠定了基础。
1 电磁-空气弹簧混合隔振器结构设计
电磁-空气弹簧混合隔振器的结构原理如图1所示,其由空气弹簧隔振器和电磁作动器并联组成,结构紧凑,占用空间小。
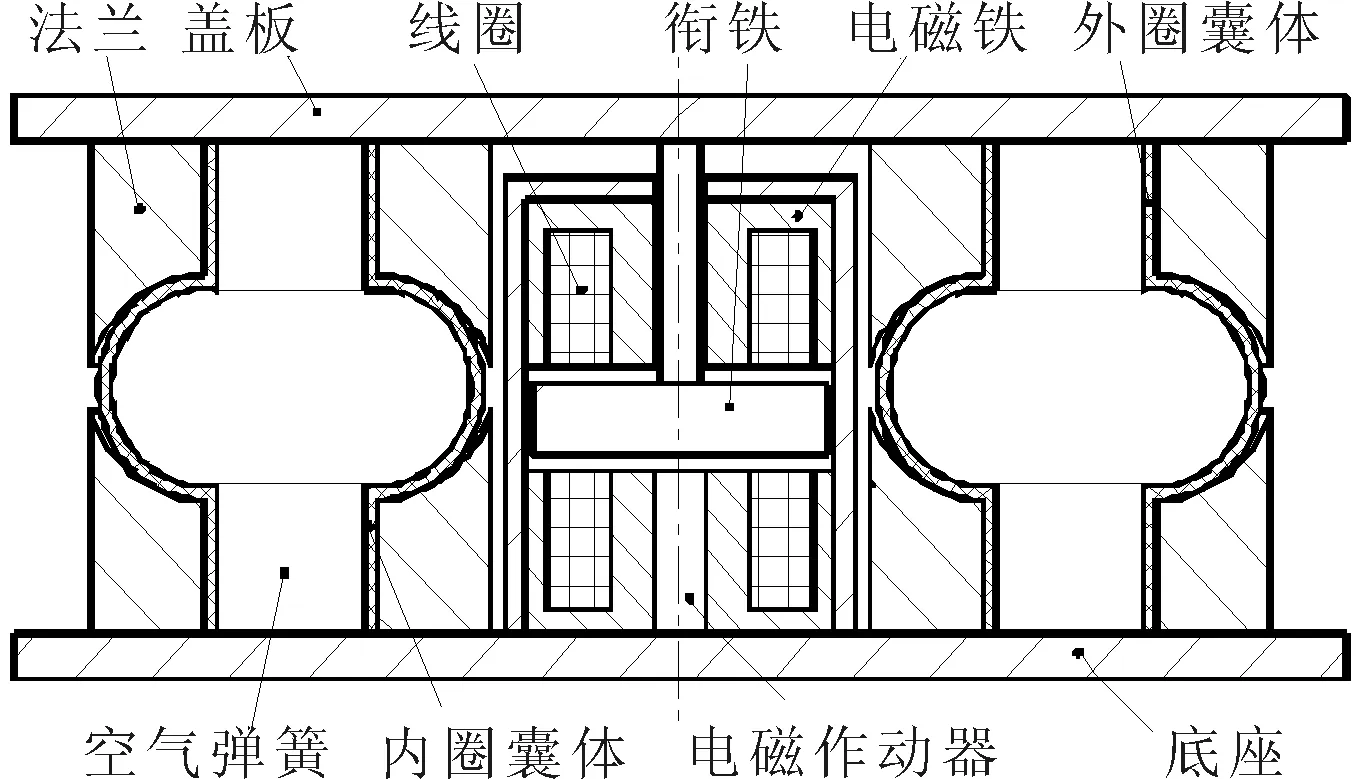
图1 电磁-空气弹簧混合隔振器结构原理图
空气弹簧由法兰、盖板、底座、内圈囊体和外圈囊体组成。其中盖板、底座、内圈囊体和外圈囊体形成气腔,充入不同压强的压缩空气,实现不同工况下的承载,并高效隔离高频振动。内圈囊体和外圈囊体均为含有帘线加强层的橡胶囊。将内圈囊体与盖板和底座所围成的空间与大气相连通,在更换或者维修电磁作动器时不会影响空气弹簧的密封性。

图2 电磁作动器差动式结构
笔者采用差动式电磁作动器,如图2所示,由电磁铁、衔铁和线圈组成。其中电磁铁关于衔铁对称布置,且同极相对。衔铁与空气弹簧的盖板固接,电磁作动器输出的电磁力经由盖板作用于设备,通过控制电磁力的大小和方向来抵消设备的低频振动,最终实现该混合隔振器对高频和低频的隔离。
2 电磁作动器参数设计
2.1 主动控制力的理论计算
假设电磁铁、衔铁和气隙中磁场分段均匀;电磁铁呈不饱和特性;不考虑磁漏和磁滞的影响。由磁路法推导差动式电磁作动器电磁力Fe为:
(1)
式中:i0为线圈偏置电流;i为控制电流;x为衔铁偏离中间位置的位移,向上为正;x0为衔铁处于中间位置时与电磁铁间的气隙;μ0为真空中的磁导率;μr为空气的相对磁导率;An为电磁铁内圈磁极面积;Aw为电磁铁外圈磁极面积;N为线圈匝数。
将式(1)在x=0 mm,i=0 A位置进行泰勒级数展开并略去高阶无穷小,可得:
(2)
由式(2)可知,当衔铁在两电磁铁正中间位置小范围内运动时,电磁力与控制电流呈线性关系。
已知参数An=2 827.4 mm2,Aw=3 820 mm2,x0=5 mm,i0=3 A。当x=0 mm,i=3 A时,由式(1)算得电磁作动器主动控制力为648 N。
2.2 主动控制力仿真分析
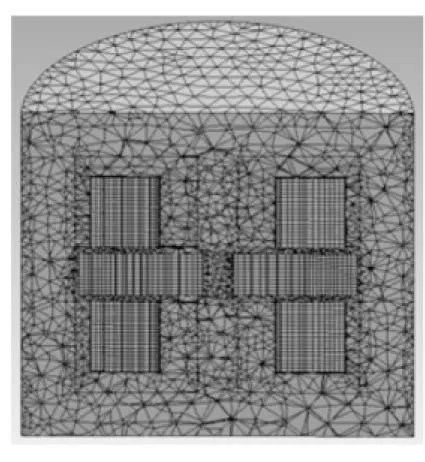
图3 网格划分结果

图4 磁感应强度分布图
用Workbench进行仿真分析,忽略倒角及安装螺纹孔,建立三维模型,采用四面体单元。网格划分结果如图3所示,最外圈为空气场。采用电流激励,磁感应强度分布如图4所示,最大为1.2 T,未出现磁饱和现象。算得衔铁电磁力大小为592.44 N,比理论计算值小8.5%,说明在气隙为5 mm时电磁铁存在一定的磁漏。
3 空气弹簧参数设计
3.1 承载力解析计算
空气弹簧1/2截面如图5所示,其中虚线为设计高度状态,实线为实时工作状态。

图5 空气弹簧1/2截面
图5中,rw为法兰的圆弧半径,x0为空气弹簧设计高度,r0、θ0分别为在设计高度位置时囊体自由变形部分的圆弧半径和圆心半角,r、θ分别为工作过程中囊体自由变形部分的圆弧半径和圆心半角。r、θ均为空气弹簧上盖板位移x的函数,即r=r(x),θ=θ(x)。
假设空气弹簧的密封性能很好,可以忽略漏气,其内压P和体积V满足如下气体状态方程:
(3)
式中:P0、V0分别为空气弹簧在设计位置时的内压(表压)和容积;Pa为大气压力;m为理想气体多变指数。
将式(3)代入空气弹簧垂直承载力公式Fp=PAe中求得空气弹簧在垂直方向上的承载力。
(4)
其中,Ae为有效承压面积,在该结构中为:
Ae=4πR0Re
(5)
其中,Re为囊体自由圆弧圆心到内外圈囊体截面对称线的距离。
对空气弹簧盖板位移x进行求导,可得其垂直刚度特性为:
(6)

3.2 承载力仿真分析
采用ABAQUS模拟空气弹簧,取其1/2建立有限元模型,如图6所示。内圈囊体和外圈囊体的橡胶层采用S4R壳单元,帘线层采用rebar单元,盖板和底座采用r3d4刚体单元,气腔内压缩气体采用Fluid Cavity功能定义。考虑到内圈囊体和外圈囊体与法兰之间的接触,建立接触单元。

图6 空气弹簧有限元模型
在对称面上施加边界条件,固定底座,在第一载荷步中将空气弹簧充气到压力为0.7 MPa,在第二载荷步中对盖板施加x方向的位移载荷,使其下降5 mm。
已知r0=49 mm,θ0=π/2,x0=212 mm,P0=0.7 MPa。由式(4)计算空气弹簧垂直方向上承载力的解析解,与仿真值对比的结果如表1所示。
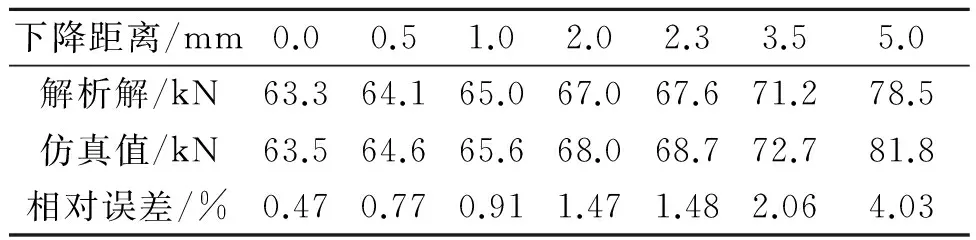
表1 空气弹簧垂直承载能力解析解与仿真值
由表1可看出解析解与仿真值相对误差最大为4.03%,误差较小,证明上述解析法用于设计空气弹簧结构可行。空气弹簧在0.7 MPa额定压强下承载能力达到60 kN,表明所设计的空气弹簧承载能力较强。
4 隔振效果仿真分析
4.1 隔振系统控制模型
将电磁-空气弹簧混合隔振器安装于设备和基座之间,假设基座是刚性的,隔振系统模型如图7所示,其中M为设备质量,cp、kp分别为空气弹簧的阻尼系数和刚度,x(t)为设备振动位移,fe(t)为电磁作动器的可控输出力,fd(t)为设备激振力,且规定向上为正。则传递到基座上的力为:
(7)
根据振动的传递规律,由图7模型可得:
(8)
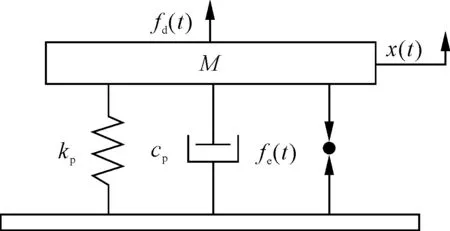
图7 电磁-空气弹簧混合隔振器隔振系统模型


(9)

笔者采用LQR最优控制,使传递到基座的力最小,同时保证所需的电磁作动力有限,系统的价值函数可表示为:
(10)
其中:Q=qCTC;N=qCTD;R=qDTD+r,q、r分别为传递到基座上的力和控制力的主动加权系数。
由极值定理即可计算出理想电磁作动器的输出控制力为:
U=-R-1(NT+BTP)X
(11)
其中,P为Riccati矩阵代数方程PA+ATP-PBR-1BTP+Q=0的解。
4.2 隔振系统控制结果分析
当电磁作动器不工作时,隔振系统为只有空气弹簧工作的被动隔振系统,否则为主被动混合隔振系统,笔者利用Matlab对这两种情况下隔振系统的力传递率进行仿真。参数M=6 t,kp=1.5×106N/m,cp=6 475 Ns/m,采用频率范围为0.01~100 Hz,幅值为600 N的扫频信号作为激励。被动隔振系统与混合隔振系统输出到基座上的力如图8所示。

图8 被动隔振系统与混合隔振系统输出力
由图8可知,在同等大小的力和频率的扰动下,混合隔振系统输出力的幅值比被动隔振系统小。由图9可知,在空气弹簧固有频率2.5 Hz附近,被动隔振系统产生了共振,在高频段具有较好的隔振效果,而混合隔振系统在2.5 Hz附近的振动明显被抑制,表明电磁作动器通过控制作动力的大小及方向可减少空气弹簧所产生的共振。电磁作动器所需输出作动力如图10所示,最大为430 N,小于理论计算的最大作动力,且在高频(>20 Hz)扰动下控制力最大只需28 N。仿真结果表明,所设计的电磁-空气弹簧混合隔振器由空气弹簧隔离高频振动,由电磁作动器消除低频振动,充分结合了两者的隔振优势,并证明了所设计结构的合理性,具有一定的应用前景。

图9 被动隔振系统与混合隔振系统力传递率

图10 电磁作动器所需输出作动力
5 结论
(1)针对舰船隔振领域设计了一种新型电磁-空气弹簧混合隔振器,其结构紧凑,维修方便。
(2)对电磁作动器进行参数设计,用Workbench仿真分析了作动力,其结果比解析计算值小8.5%,说明所设计的电磁作动器在气隙为5 mm时存在一定的漏磁。
(3)对空气弹簧进行参数设计,用ABAQUS进行仿真分析,其承载能力为60 kN,相比解析计算值误差最大为4.03%,表明空气弹簧承载能力强。
(4)用LQR算法对混合隔振器的力传递率进行了仿真,结果表明,电磁作动器使空气弹簧的共振明显被抑制,同时空气弹簧有效隔离了高频振动,证明所设计的混合隔振器结合了空气弹簧和电磁作动器的优点,同时也克服了各自的缺点。
[1] DALEY S, JOHNSON F A, PEARSON J B, et al. Active vibration control for marine applications[J].Control Engineering Practice, 2004,12(4):465-474.
[2] KEMMETMULLER W, HOLZMANN K, KUGI A, et al. Electrorheological semiactive shock isolation platform for naval applications[J]. IEEE/ASME Transactions on Mechatronics, 2013,18(5):1437-1447.
[3] 何琳,徐伟.舰船隔振装置技术及其进展[J].声学学报,2013(2):128-136.
[4] 胡业发,周祖德,江征风.磁力轴承的基础理论与应用[M].北京:机械工业出版社,2006:106-107.
[5] 宋春生,胡业发,周祖德.差动式电磁主动隔振系统的控制机理研究[J].振动与冲击,2010,29(7):24-27.
[6] 徐伟,李桐桥.推进电机新型隔振装置设计研究[J].舰船科学技术,2006(z2):86-88.
[7] KIM H T, LEE K W, KIM C H, et al. An electro-magneto-pneumatic spring for vibration control in semiconductor manufacturing[C]∥2009 IEEE International Conference on Mechatronics.Malaga :IEEE, 2009:1-6.
[8] KIM H T, KIM C H, KANG S B, et al. A 3 DOF model for an electro magnetic air mount [C]∥2011 IEEE International Conference on Mechatronics. Istanbul :IEEE,2011:29-33.
[9] DALEY S, JOHNSON F A, PEARSON J B, et al. Active vibration control for marine applications[J]. Control Engineering Practice, 2004,12(4):465-474.
[10] 何琳,李彦,杨军.电磁-气囊主被动混合隔振装置理论和实验[J].声学学报,2013,38(2):241-249.
ZHANG Jinguang:Prof.; School of Mechanical and Electronic Engineering, WUT, Wuhan 430070, China.
[编辑:王志全]
Design and Simulation of Electro-Magneto-Pneumatic Vibration Isolator
ZHANGJinguang,CHENJuan,ZHOUJia,SONGChunsheng
Aiming at vessels' vibration isolation, a novel electro-magneto-pneumatic vibration isolator (EMPVI) consisting of an electromagnetic actuator and a pneumatic spring was proposed. The electromagnetic actuator and the pneumatic spring were designed. Workbench was applied to analysis active force of the electromagnetic actuator, and ABAQUS was used to calculate the pneumatic spring's bearing capacity. The control model of the vibration isolation system was built. The force transmissibility was simulated with LQR optimal control theory. The results show that the electromagnetic actuator effectively suppressed resonance of the pneumatic spring in low frequency, and the pneumatic spring isolated well in high frequency vibration. The EMPVI was demonstrated to combine the advantages of the electromagnetic actuator and the pneumatic spring with avoiding their shortcomings.
electromagnetic actuator; pneumatic spring; vibration isolation
2015-03-06.
张锦光(1966-),男,广东揭西人,武汉理工大学机电工程学院教授;博士.
国家自然科学基金资助项目(51275368);国家自然科学青年基金资助项目(51205296).
2095-3852(2015)05-0529-04
A
TH113.1
10.3963/j.issn.2095-3852.2015.05.001
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
中小企业管理与科技(2022年6期)2022-06-14
建材发展导向(2022年1期)2022-03-08
纺织器材(2021年5期)2021-11-11
科学技术创新(2021年22期)2021-08-16
防爆电机(2021年2期)2021-06-09
制造业自动化(2019年9期)2019-09-27
时代农机(2019年5期)2019-08-17
西安航空学院学报(2017年3期)2017-07-05
科技创新与品牌(2017年3期)2017-04-27