
Research on bionic quadruped robot based on hydraulic driver*
2015-02-15 02:19LiMantian李满天JiangZhenyu
High Technology Letters 2015年1期
Li Mantian (李满天), Jiang Zhenyu
(State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, P.R.China)
Research on bionic quadruped robot based on hydraulic driver*
Li Mantian (李满天), Jiang Zhenyu*
(State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, P.R.China)
A prototype of hydraulically powered quadruped robot is presented. The aim of the research is to develop a versatile robot platform which could travel fleetly in outdoor terrain with long time of endurance and high load carrying ability. The current version is 1.1m long and 0.48m wide, and weights about 150kg. Each leg has four rotational joints driven by hydraulic cylinders and one passive translational joint with spring. The torso carries the control system and the power system. A novel control algorithm is developed based on a Spring-Loaded Inverted Pendulum model and the principle of joint function separation. The robot can not only cross a 150mm high obstacle in static gait and trot at 2.5km/h and 1km/h on the level-ground and 10°sloped-terrain respectively, but also automatically keep balanced under lateral disturbance. In this paper, the mechanical structure and control systems are also discussed. Simulations and experiments are carried out to validate the design and algorithms.
legged robots, locomotion control, quadruped robot, trotting gait, hydraulic actuation
0 Introduction
The mobile robotic platform navigating in field environment should not only have long time of endurance and high load carrying ability, but also be capable of passing through the rough terrain fleetly. Wheeled or tracked robots still have major limitations and difficulties in passing over very rough or broken terrains. However, quadruped mammals can run or walk on different terrains driven by the elastic muscles and tendons with attitude stability. The quadruped robots which imitate animals may have better performance in unstructured environment than traditional designs with wheels or tracks in terms of mobility and versatility.
An extensive literature is currently available on the issues of quadruped robots such as modelling, gait control and robot design. At present, significant examples of such legged robots are: earlier legged robots in MIT-Leg[1,2], quadruped series of SCOUT in Mcgill University[3,4], HyQ in Italian Institute of Technology[5-7], StarlETH in Swiss Federal Institute of Technology[8-11], the four-legged robots (Bigdog and LS3) developed by Boston Dynamics[12,13], and the Scalf developed by Shandong University.
Spring Loaded Inverted Pendulum (SLIP) is a simplified model widely used in biomechanical and legged robot study. Based on the SLIP model, MIT-Leg laboratory started researches on hopping legged robot in 1980s, and made highly dynamic balance possible on one-, two-, and four-legged robots. Buehler and Orin[14,15]improved the performance by studying the expanded model based on SLIP or introducing more biological characteristics and intelligent control. Anyway, the simplified models were still quite different from the real bionic robot. For example, the degrees of freedom (DOF) were limited to completely describe the torso motions in robot, and the bionic leg with multi-joints was more complicated than straight leg. Another possible solution to improve the mobility and robustness of legged locomotion was dynamic model-based approach, of which the Virtual Model Control (VMC) was a typical representative. HyQ and ScarlETH used the VMC controller in the trunk stabilizing or 2D running regulating. However, this method relied on the force or torque servo, and brought more challenges in actuators controlling. Delighted by neuromechanism in animals, researches have also been done on the bionic neural control system which consists of a CPG (central pattern generator), reflexes and response[16-18]. There may still be difficulties adding the robot bionic dynamic characteristics into this biologically inspired control frame.
On the other hand, the most existing four-legged robots could not step outside with heavy load because of the size and motor-gearbox actuator. In recent years, Boston Dynamics developed the series of hydraulically actuated quadruped robots (Bigdog, LS3) which had excellent performance. Unfortunately, little detail has been published about the design or control algorithms. The inertial forces and foot-land contacts will play more significant roles in dynamic walking when legged robots have larger size, heavier weight and faster walking speed, so the mechanical design, drive theology and control algorithm of legged robots still need to be carefully discussed. To resolve these problems, a bionic quadruped robot based on hydraulic actuators and onboard power system is developed in this paper. A novel trajectory planning method introducing the SLIP dynamics is proposed. The simulations and prototype experiments are also implemented to validate the robot design and control algorithms.
1 Mechanical system
Each leg of mammals commonly has 4 DOFs in 3 main joints, including hip/shoulder, knee/elbow and wrist/ankle. Imitating the four-legged mammals, the robot described in this paper has 4 segments on each leg. Segments 1 to 3 play the roles of scapular, humerus and radius-ulna. Segment 0 connecting the truck and leg is designed to create the abduction and adduction (ab/ad) motion of the leg. All these segments are actuated by hydraulic cylinders, which are driven by high performance servo-valves. The passive spring between the ankle joint and the foot is to replicate the elastic function of muscle and tendon in the mammal leg, i.e. to reduce the impact on contact with the ground and recycle the energy in walking. The fore and hind legs are designed in fully symmetrical structure, and the wrist and ankle joints are set to be in opposite orientations to imitate the knee and elbow joints configuration of mammalian. The rigid truck is a frame structure to mount and accommodate the onboard control and power systems. Most of the parts in legs are made of a strong aluminum alloy (type 7075), while the trunk frame uses the carbon fiber composite materials. The prototype is shown in Fig.1.
The onboard hydraulic system is shown in Fig.2. The power supply is an engine that delivers about 30 hp. The engine drives a hydraulic pump which delivers high-pressure (18MPa) hydraulic oil to leg actuators. The overall hydraulic system also incorporates an oil tank, an accumulator, a filter, a heat exchanger with >electric fan, a dump valve, a solenoid valve, two check valves, two quick connectors, some manifolds, and sensors for oil pressure and temperature. These attachments are connected to or fitted in two valve blocks to simplify the system. A rubber sac plays the role of oil tank in hydraulic system, and it is found that the pump could work well under the backpressure from atmospheric pressure and the contraction of rubber sac.

Fig.1 Hydraulic quadruped robot

Fig.2 Onboard hydraulic system
In order to reduce the weight and improve the performance (response frequency and accuracy), the custom actuator in legs is tightly integrated. As shown in Fig.3, this hydraulic driver package (HDP) consists of a servo valve, a piston position potentiometer, a load cell and an asymmetric cylinder.

Fig.3 Hydraulic driver package
2 Control algorithm
The tendons and muscles in animals could absorb the shock, store and recycle the energy when running. This characteristic is similar to the behaviour of the SLIP model (as shown in Fig.4), in which the running velocity and the hopping height could be well controlled by regulating the touch down angle and the thrust exerted by leg. In our previous work[19], an algorithm based on the SLIP model was developed to control the quadruped robot with straight springy legs. In that control method, the joints in legs had different functions in regulating the motions of trunk with 6 DOFs. Motivated by the idea that each joint may have different functions, we propose a novel multi-joints control approach.

Fig.4 SLIP model[19]
As shown in Fig.5, knee or elbow is the primarily functional joint in robot forward walking, and works as the rotational joint in the SLIP model or the hip/shoulder joint in mammals. The hip/shoulder joint in our robot produces the thrust to add or remove the energy from the system, compared to the translational joint in SLIP. To imitate the knee and elbow joints configuration of mammalian, the wrist and ankle joints are set to be in opposite orientations. This biological characteristic may produce breaking or propulsive forces in stance phase and improve the stability[20]. The virtual line connecting the foot and knee is approximately parallel to the straight leg in SLIP. The function of ab/ad hip joint is to regulate the yaw, roll and lateral motions of torso.
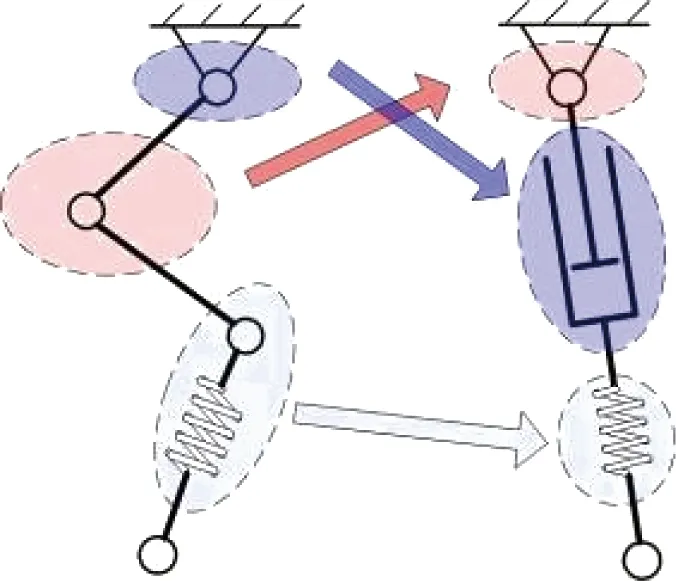
Fig.5 The principle of joint function decomposing
Under the analysis above, a joint trajectory planning method introducing SLIP dynamics is developed. This paper mainly discusses the algorithm of the knee and ab/ad hip joints, considering they are the primarily functional joints in this control approach.

(1)

In stance phase, the yaw and roll are actively regulated by the feed-forward trajectory planning and the PID feed-back control of ab/ad joint respectively, while the lateral motion is passively regulated by the coupling effect in trunk motions. The algorithm is given by

(2)

Similarly, the knee joint has to choose an appropriate touch down angleθknee_touchin the forward motion control. However, the planed trajectory in stance phase is a linear curve compared to the cubic curve employed by ab/ad joint. The algorithm is given by
(3)
(4)

In earlier marking time experiment, we found that the trunk might suddenly start to swing back and forth, with serious pitch fluctuation. The frequency of the vibration coincided with the gait frequency. The quadruped robot discussed in this paper has unparallel springs in fore and hind legs. Fig.6 shows a simplified model of robot in sagittal plane. The segments in legs and trunk are fixed together, feet are hinge connected to the ground, and the translational joints in leg are reserved. This model has 1 DOF, which means that the trunk is still movable even when the joints have been controlled at fixed angles. The unexpected vibration may be caused by the oscillating energy which flows between two springs in fore and hind legs.

Fig.6 Simplified model in sagittal plane
When the vibration occurs in marking time, the deformation of two springs would be different. Furthermore, it leads to the asymmetry in two forward friction forces at fore and hind feet. However, the sum of these two frictions should be zero in ideal marking time. To suppress the vibration, the friction feedback in knee joint trajectory planning is added. The algorithm given in Eq.(4) is modified as
(5)
where,FybandFyfare the forward friction forces in hind and fore feet respectively,KFis the control gain. Considering the tractive force should increase when robot walking faster, another gain,KFv, is added in the algorithm.
Fig.7 shows the control diagram. The approach proposed may have some advantages over the classic SLIP theory, CPG and traditional foot trajectory planning method. First, it avoids the difficulties in joint force or torque servo. Second, it reserves the basic SLIP dynamic characteristic compared to the CPG or foot trajectory planning. Third, this approach allows control of body attitude and ground reaction at feet to smooth the walking of the robot.

Fig.7 Control diagram
3 Simulation
In this work, the control algorithm is firstly tested by the co-simulation of ADAMS and Matlab/Simulink, including trotting on the level and uneven road. The model weights 100kg, with extra 50kg load. Other mechanical parameters are set the same as the prototype.
The simulation results of trotting on level ground are shown in Fig.8. Compared to prototype experiment, the parameters of joints and contacts are idealized and simple. The robot could still trot and stay balanced without friction control. However, the forward velocity result with the friction force control has much weaker fluctuation, which indicates that friction force control is necessary and effective in our or maybe other trajectory planning methods to smooth the motion of robot.

Fig.8 Trotting on level-ground in simulation
Trotting on rough terrain was also tested. The height of the ground with respect to the reference plane varies from 10mm to 60mm randomly. As shown in Fig.9, when stepping on the uneven land, the velocities and attitude angles have larger fluctuations. The roll and lateral motion was disturbed more seriously caused by the different height of diagonal feet. Anyway, the robot stays balanced when crossing the rough terrain and returns approximate periodic motion when stepping on even land again. This simulation indicates that the heavy loaded robot would be capable of passing through the rough terrain fleetly by employing the proposed control algorithm.
In the simulation shown in Fig.10, a lateral external force of 1000N for 0.1s (100kgm/s impact) is exerted on the robot torso. Under the impact, the ab/ad hip joints in stance legs rotate immediately to make robot step aside along the direction of disturbance. The spontaneous rotation of the ab/ad hip joints in stance legs could effectively weaken the impact caused by disturbance, smooth the motion in regulating process and protect the robot. In the result, the robot returns stable in 3~4 steps, which proves the robustness of control algorithm.

Fig.9 Trotting on rough terrain in simulation

Fig.10 Simulation under lateral disturbance
4 Control system
The robot has 44 sensors: an inertial measurement unit (IMU) measuring the attitude and acceleration of the trunk, 20 motion sensors and 16 load cells on 16 actuators and 4 springs, 4 3-componet force sensors in each foot and other 3 sensors monitoring hydraulic pressure, temperature and engine speed. The controller should integrate information from these sensors to provide estimates of robot status and control 16 actuators. As shown in Fig.11, a two-level control hierarchy based on multi-bus is put forward in constructing the control system. The gait and the trajectory are generated in main controller, while the motions and the forces of 4 HDPs on each leg are directly regulated by servo controller based on DSP TMS320LF28335.
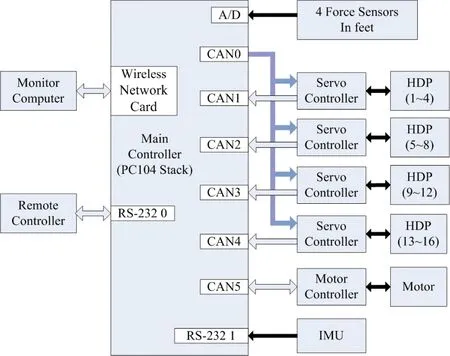
Fig.11 Control hierarchy diagram
The main controller directly collects the data of feet’s force sensors and IMU, receives feedback data of actuators from HDP servo controllers through 4 CAN buses and transmits the commands to servo controllers through a CAN bus. An extra CAN bus exchanges the data between the main and motor controllers. The main controller also receives the command from remote controller and uploads the data to monitor computer through wireless serial port and wireless network card respectively.
The main controller contains a PC104 Pentium processor running a multi-rate real time operating system (QNX). The software system consists of a primary thread and several sub-threads. The tasks of the primary thread include assigning system variables, setting the system clock, starting and suspending sub-threads, monitoring the running status, etc. Each sub-thread is respectively in charge of wireless communicating, executing the control algorithms, collecting data, sending commands, etc.
5 Prototype experiments
A series of experiments were carried out to validate the design and the algorithm, including trotting on level-ground and sloped-ground, lateral disturbance and passing over 150mm obstacles. The prototype was protected but not constrained by the chains and a movable frame in these experiments. The robot was powered by onboard hydraulic system described above and carried 52kg load. The onboard computer received the command from remote human operator, controlled the robot’s behaviors and recorded large amounts of data in flash memory for performance and failure analysis.
The trot on flat ground was performed firstly to test the robot hardware and software. And we found that the friction feedback control was also necessary in the stable walking, otherwise the robot could easily fall down caused by the fluctuation of pitch angle. As shown in Fig.12, the fluctuations of pitch and roll were regulated in lower range. The positive offset of yaw was mainly caused by the existing drift of IMU. An obvious steady state error existed in forward velocity control, as shown by the plots of actual and desired walking velocity (shown dashed). Currently, the increase of walking speed was restricted by the output performance of joint actuators. The weight of prototype (150kg) was much heavier than the simulation model (100kg) employed in preliminary study, and we failed to leave enough margins in actuator design.

Fig.12 Trotting on level-ground
Fig.13 shows the snapshots in one trot cycle when walking on inclines with slope up to 10 degrees. The robot started walking on the flat ground. When transiting to the slop, the lateral motion was disturbed by the different height of diagonal feet. The robot could stay balanced and spontaneously adjusted the pitch according to the slope, and reached the speed of 0.3m/s.
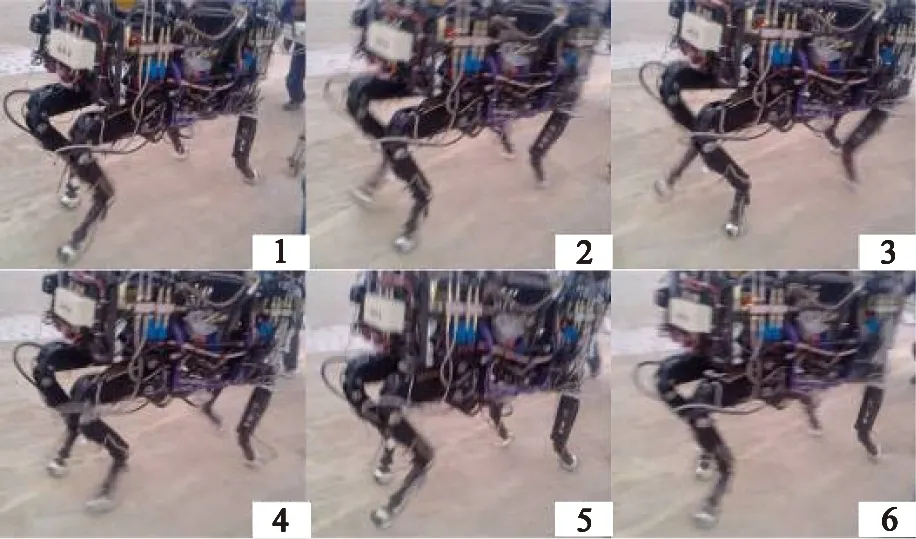
Fig.13 Trotting on 10° sloped-terrain
In the experiment of lateral disturbance, the robot was impacted by a sandbag with 40kg weight. As shown in Fig.14, the legs of robot had compliant motion under 80kgm/s disturbance. Like the results in simulation, there was also a rebound phenomenon in the later adjustment procedure. The robot recovered balance within 2 gait periods.

Fig.14 Snapshots under lateral disturbance
A static walk was performed successfully in passing over an obstacle. As shown in Fig.15, the robot was able to step on and down the obstacle with 150mm height. The reliability and endurance was also tested in marking time that lasted 40min.

Fig.15 Passing over an obstacle
6 Conclusion
The paper introduces a quadruped bionic robot based on hydraulic actuators and onboard power system. The robot had four active joints driven by four identical hydraulic cylinders, as well as a passive prismatic joint with spring in each leg.
A control algorithm based on joint trajectory planing and SLIP dynamics was discussed in this work. The robot was successfully tested by a series of simulations and experiments that demonstrated load capabilities, robustness, reliability, endurance and the potential for navigating in field environment.
A next-generation robot is under designing to improve the performance on more challenging terrain. Continuing work will involve (1) more powerful actuators with better performance in position and torque control, (2) optimizing the mechanical design to reduce weight and (3) improving the control algorithm on the basis of deeper dynamic and biomimetic analysis.
Reference
[1] Raibert M H. Legged Robots That Balance. Cambridge, MA: MIT Press, 1986
[2] Raibert M, Chepponis M, Brown Jr H. Running on four legs as though they were one.IEEEJournalofRoboticsandAutomation, 1986, 2(2): 70-82
[3] Papadopoulos D, Buehler M. Stable running in a quadruped robot with compliant legs. In: Proceedings of the International Conference on Robotics and Automation, San Francisco, USA, 2000. 444-449
[4] Lasa M, Buehler M. Dynamic compliant quadruped walking. In: Proceedings of the International Conference on Robotics and Automation, Seoul, Korea, 2001. 3153-3158
[5] Semini C, Tsagarakis N G, Guglielmino E, et al. Design of HyQ——a hydraulically and electrically actuated quadruped robot.ProceedingsoftheInstitutionofMechanicalEngineers,PartI:JournalofSystemsandControlEngineering, 2011, 225(6): 831-849
[6] Focchi M, Guglielmino E, Semini C, et al. Control of a hydraulically-actuated quadruped robot leg. In: Proceedings of the International Conference on Robotics and Automation, Anchorage, USA, 2010. 4182-4188
[7] Boaventura T, Semini C, Buchli J, et al. Dynamic torque control of a hydraulic quadruped robot. In: Proceedings of the International Conference on Robotics and Automation, Saint Paul, USA, 2012. 1889-1894
[8] Hutter M, Gehring C, Bloesch M, et al. StarlETH: A compliant quadrupedal robot for fast, efficient, and versatile locomotion. In: Proceedings of the International Conference on Climbing and Walking Robots, Baltimore, USA, 2012. 1-8
[9] Hutter M, Remy C D, Hoepflinger M A, et al. ScarlETH: Design and control of a planar running robot. In: Proceedings of the International Conference on Intelligent Robots and Systems, San Francisco, USA, 2011. 562-567
[10] Hutter M, Remy C D, Hoepflinger M H, et al. High compliant series elastic actuation for the robotic leg scarleth. In: Proceedings of the International Conference on Climbing and Walking Robots, Paris, France, 2011. 1-8
[11] Hutter M, Remy C D, Hoepflinger M A, et al. Efficient and versatile locomotion with highly compliant legs.IEEE/ASMETransactionsonMechatronics, 2012,18(2):449-458
[12] Raibert M, Blankespoor K, Nelson G, et al. Bigdog, the rough-terrain quadruped robot. In: Proceedings of the 17th World Congress of the Internatioal Federation of Automatic Control, Seoul, Korea, 2008. 10823-10825
[13] Buehler M, Playter R, Raibert M. Robots step outside. In: Proceedings of the International Symposium Adaptive Motion of Animals and Machines, Ilmenau, Germany. 2005. 1-4
[14] Palmer L R, Orin D E. Quadrupedal running at high speed over uneven terrain. In: Proceedings of the International Conference on Intelligent Robots and Systems, San Diego, USA, 2007. 303-308
[15] Palmer L R, Orin D E. Force redistribution in a quadruped running trot. In: Proceedings of the International Conference on Robotics and Automation, Roma, Italy, 2007. 4343-4348
[16] Kimura H, Fukuoka Y, Cohen A H. Adaptive dynamic walking of a quadruped robot on natural ground based on biological concepts.TheInternationalJournalofRoboticsResearch, 2007, 26(5): 475-490
[17] Maufroy C, Nishikawa T, Kimura H. Stable dynamic walking of a quadruped robot “Kotetsu” using phase modulations based on leg loading/unloading. In: Proceedings of the International Conference on Robotics and Automation, Anchorage, USA, 2010. 5225-5230
[18] Spröwitz A, Tuleu A, Vespignani M, et al. Towards dynamic trot gait locomotion: Design, control, and experiments with cheetah-cub, a compliant quadruped robot.TheInternationalJournalofRoboticsResearch, 2013,32(8): 1-19
[19] Jiang Z, Li M, Guo W. Running control of a quadruped robot in trotting gait. In: Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics, Qindao, China, 2011. 172-177
[20] David V L, Sanfoud G M. Directionally compliant legs influence the intrinsic pitch behavior of a trotting quadruped.ProceedingsoftheRoyalSociety, 2005, 272(1563): 576-572
Li Mantian, received his Ph.D. degree from Harbin Institute of Technology in 2006. He is currently an associate professor in State Key Laboratory of Robotics and System, Harbin Institute of Technology. His main research interest is in micro robot and biomimetic robot.
10.3772/j.issn.1006-6748.2015.01.002
*Supported by the National High Technology Research and Development Programme of China (No. 2011AA040701).
*To whom correspondence should be addressed. E-mail: for0207@126.comReceived on Nov. 12, 2013, Guo Wei, Sun Lining
 High Technology Letters2015年1期
High Technology Letters2015年1期
- High Technology Letters的其它文章
- Maneuvering target tracking algorithm based on cubature Kalman filter with observation iterated update*
- Realization of a tunable analog predistorter using parallel combination technique for laser driver applications*
- Data organization and management of mine typical object spectral libraries*
- Retrieval and analysis of sea surface air temperature and relative humidity*
- Filtered-beam-search-based approach for operating theatre scheduling*
- Research on assessing compression quality taking into account the space-borne remote sensing images*