
基于视频追踪的雨棚结构震动监测方法探讨
2015-02-06 07:58范登科
地理空间信息 2015年3期
范登科,李 明
(1.铁道第三勘察设计院集团有限公司,天津 300251;2.武汉大学 遥感信息工程学院,湖北 武汉 430079)
基于视频追踪的雨棚结构震动监测方法探讨
范登科1,李 明2
(1.铁道第三勘察设计院集团有限公司,天津 300251;2.武汉大学 遥感信息工程学院,湖北 武汉 430079)

提出一种通过快速处理视频数据,精确获取高铁站台雨棚震动幅值及频率信息的方案。该方案采用特征提取、目标追踪、曲线修正等计算机图形图像学技术辅助人工处理分析组成视频文件的各帧图像,提高了生产效率和成果精度,降低了误差干扰引起的不确定性。经业务化实施验证及对比分析,体现出较高的应用价值。
特征提取;目标追踪;曲线修正
对高铁站台雨棚开展稳定性和安全性监测的方案有3种:采用地面SAR扫描仪;借助专业高速相机配合全站仪测量像控点;利用准专业相机高清摄像配合全站仪激光照准的近景非地形摄影测量技术。本文采用第3种,采集到多组全站仪激光照准仰角和测距数据,以及直观反映雨棚震动幅度和频率的视频数据。
雨棚震动轨迹的曲线是一项耗时耗力的数据处理工作,传统作业方法是首先通过解码工具将视频按帧分解为数字图像,然后选择视频中雨棚震动剧烈部位某一显著特征作为监测对象,在各帧图像上手工标记该对象位置,并记录其坐标,最终通过建立纵坐标值与时刻二者间的对应关系,得到雨棚震动轨迹曲线。本文提出一种基于计算机视觉算法的视频数据处理方案,能自动提取和分析监测目标的位置,修正采集过程中引入的误差,快速、准确地分析,得出可靠性高的震动监测曲线成果。
1 震动数据采集与曲线计算
以一台佳能5D Mark II套机和一台Leica全站仪组合构成一套震动监测设备。其中前者经过专业改造,由专业设备(三轴螺栓固定云台)将其与测量三脚架连接固定,后者则直接与测量三脚架连接固定,从而实现2 台仪器的对中整平,以确保观测和采集结果的稳定性。在与雨棚震动剧烈部位垂直方向上的站台进行设站,震动监测设备与待监测雨棚的相对位置关系如图1所示。

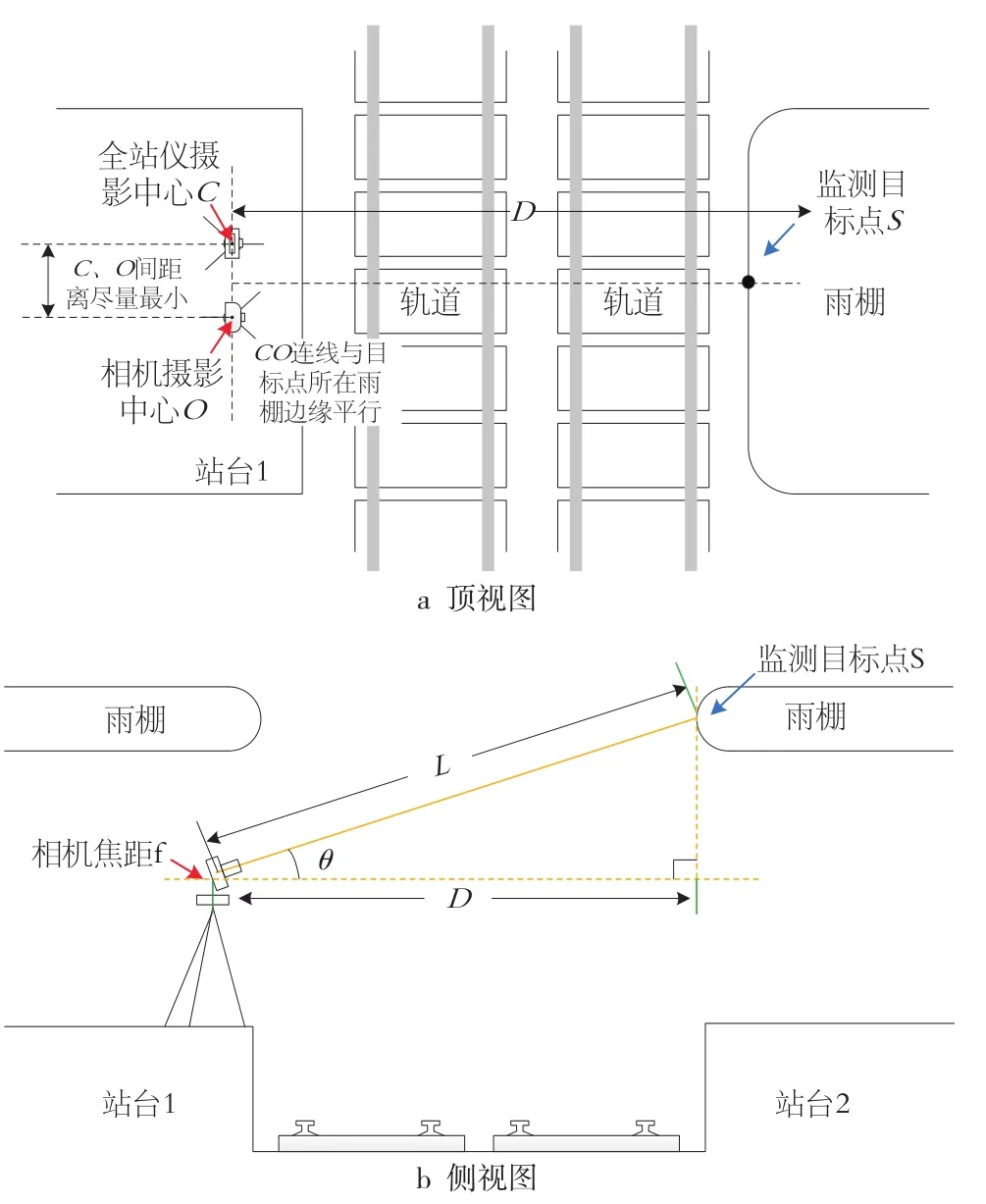
图1 监测设备与监测目标的相对位置及观测构象关系示意图
佳能相机采用中心投影构象方式,并调节到最大焦距,则雨棚实际的震动曲线方程H(t)可表示为:式中,Cp为相机所拍摄视频图像中单个像元对应传感器实际物理尺寸长度;h(t)表示帧图像上待监测目标垂直方向上位移随时间t变化的规律;L代表摄影中心到观测目标的距离,通过全站仪激光照准后量测获得;f是相机镜头焦距。通过量测视频中雨棚上显著特征目标的震动情况,确定曲线h(t)的形式。
2 视频监测自动化处理
2.1 总体处理方案
视频监测总体处理流程如图2所示,将视频数据进行解码后分解,提取第一帧G1(或任意一帧Gi)图像,在点特征提取算法辅助下通过点击获取初始的追踪目标点P1(Pi);以P1(Pi)、帧图像G1(Gi)和相邻一帧图像G2(Gi+1)为输入,采用目标追踪算法在帧图像G2(Gi+1)上自动匹配出相对应的同名特征点P2(Pi+1);将P2(Pi+1)作为下一次光流场运算的输入,结合帧图像G2(Gi+1)与相邻的下一帧图像,重复上述过程,直到追踪得到特征点P在所有帧图像上的位置信息。根据特征点图像坐标反映的局部震动极值,确定建筑结构的起震中心,分段拟合出表达起震中心位置随时间变化的二次曲线f(t)。最后根据该二次曲线方程修正特征点的位置偏移,并将起震中心归一化到横轴,输出得到震动时序变化监测结果曲线Sm。
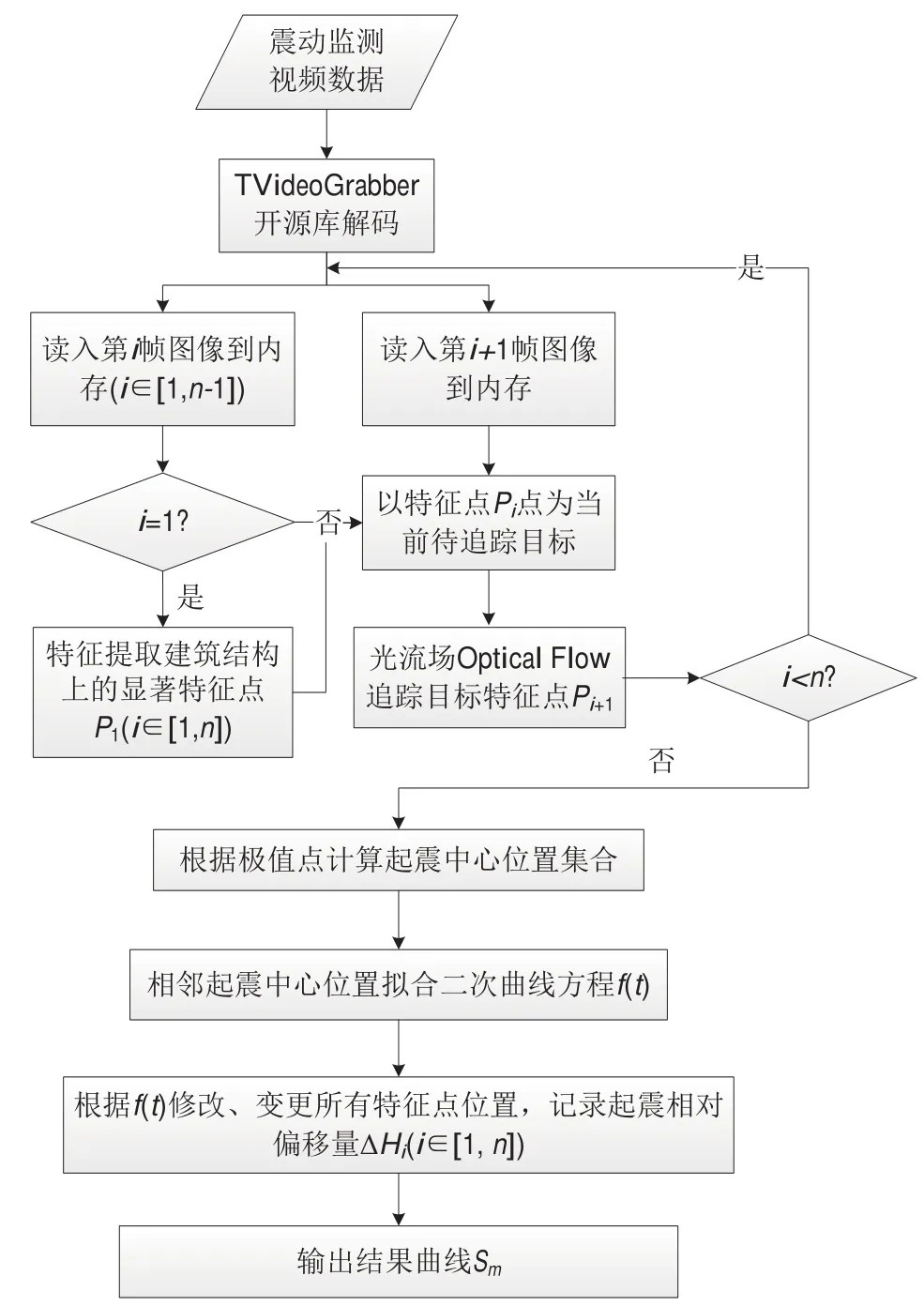
图2 雨棚建筑结构震动视频监测处理流程
2.2 特征提取和标记
为了在单帧图像上标记出用于震动监测的显著特征点,本文采用人工预判所处邻域范围结合点特征提取算法的方式精确定位目标点,以确保所选监测目标的唯一性和一致性。首先在帧图像上预先判断出显著特征点所处的最可能范围C,然后提取该范围内的图像IC,应用Harris点特征提取算法,获取IC内特征描述符取得极值时对应的像素点,作为最终选择的待监测对象。

在具体实现过程中,通过对图像IC计算等效评价函数:并判断其取值满足“是范围C内极大值”的条件。式中Ix、Iy表示帧图像中水平、垂直方向上的一阶差分。
2.3 监测目标追踪
在具有时序先后关系的多帧图像上,以计算机视觉代替人眼识别运动目标的位置变化规律是当前实现目标追踪的主要方式。本文采用Lucas Kanade光流场算法监测特征点在视频中不同帧图像上的运动轨迹,其相似度运算函数为:

式中,wx和wy表示以(x,y)为中心的邻域窗口半径。可以看出,当相似度函数ε取得最小值时,像素集合I(u)和J(v)最相似,得到的d=(dx, dy)反映了位置u=(ux,uy)处的光流大小,也表示了特征点在时间序列上I和J两帧图像中的位移变化量。
由于视频中拍摄的雨棚震动变化是连续的,因此在使用Lucas Kanade光流场算法进行显著特征点追踪和定位时,以相邻两帧图像以及前一帧图像上特征点Pi作为算法输入,追踪获取后一帧图像上相似目标点Pi+1的位置,而上一节中计算机辅助人工提取的特征点P0作为目标追踪的初始对象。
2.4 震动曲线修正
观察视频可以发现,由动车经过时引起的地面晃动和气流冲击会使固定相机的仰角螺栓发生不易察觉的松动,导致摄影中心位置发生连续改变。这使监测后得到的特征点运动规律曲线如图3a,整体起伏状况十分明显。这种起伏变化没有任何规律,不能单纯地采用任何一种函数关系来描述它。本文提出一种曲线修正的方法:使用相邻起震中心位置进行局部二次曲线拟合,从而对震动每一周期内的中心位置变化进行分段描述,并根据拟合出的函数关系修正目标点位置,最终归一化起震中心到纵轴0值的位置。
图3展示了分段二次曲线拟合的过程。以图3a中t∈[t1, t2]时间段为例,该段时间内雨棚经历了一个周期的震动,三次通过起震中心,起震中心的坐标值可由相邻波峰和波谷的平均值近似替代,则该段时间内起震中心的二次曲线方程参数可以通过回归计算获得,如图3b。类似的,其余各个震动周期内的参数也可以通过独立求解获得。修正归一化到横轴后的曲线形式如图3c。
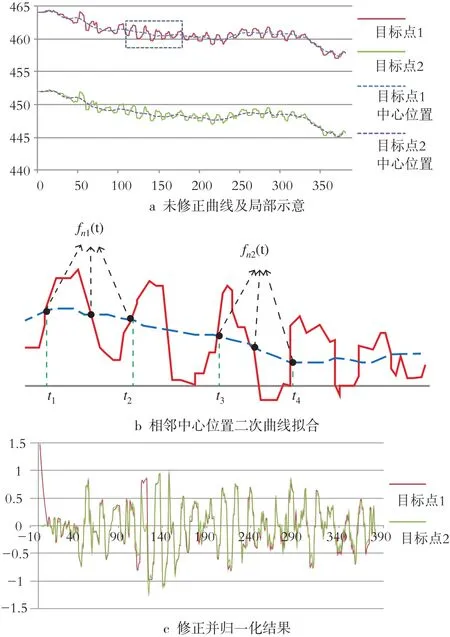
图3 震动曲线中心位置修正与归一化处理方法示意图
由于每3个起震中心位置点拟合出一段曲线方程,因此无法保证对曲线两端部分的修正精度。而实际视频采集中,曲线两端的起始和终止部分代表了启动和停止拍摄的动作,会引入更加难以描述的相机抖动误差,可对其忽略。
3 监测结果分析
以2012-4-12 G135次列车通过天津南站时位于设站点G106处监测设备采集数据处理为例,该段监测视频文件拍摄时长为32 s,帧速30 fps,由973帧时序图像组成,图幅大小1 920×1 088,视频采集所用相机镜头焦距为105 mm,传感器物理尺寸大小36×24 mm。利用本文方法处理该视频文件,首先得到以像素单位描述运动规律的震动曲线h(t)。结合全站仪激光照准测得的斜距L=21.85 m,传感器参数Cp计算值0.022 06 mm/像素,代入式(1)可获得雨棚实际震动曲线方程为H(t)=4.590 3*f(t),如图4所示。经量测,曲线的最大正向振幅为7.79 mm,最大负向振幅为6.93 mm。
图5展示了对上述视频文件手工处理的震动监测曲线HO(t)。与图4对比发现,为了降低处理工作量,前者对全部973帧图像进行了抽样,利用抽样得到的79帧进行监测,HO反映的震动频率明显低于本文方法所得震动曲线H,同时受误差影响,曲线最大正向振幅和最大负向振幅出现在不同的震动周期内,与实际情况不符;对比图中虚线包含部分,曲线H描述了高铁列车经过时震动3次从产生到剧烈再到消失的过程,而HO显然无法表现这一规律。
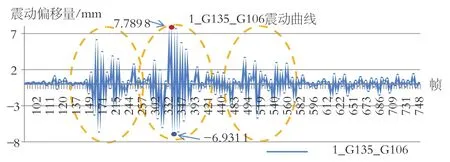
图4 G135次列车通过时G106设站点采集视频处理后监测曲线结果

图5 原始人工标记方法对G135次列车通过时G106设站点采集视频处理后监测曲线结果
4 结 语
在相同外业观测条件下,利用本文方法处理监测视频后得到的站台雨棚震动曲线在详细程度、完整性、正确性、异常判断等方面都优于人工处理得到的震动曲线,同时能够极大地提高视频数据分析和处理的作业效率。采用计算机辅助特征提取和目标追踪后不仅增强了监测数据处理的自动化程度,同时削弱了误差的干扰,确保了监测成果的可靠性和稳定性。尽管采用观测墩代替全站仪可以提高外业视频采集的精度,但是受高铁车站特殊环境制约,在实际操作中无法开展和实施,因此在数据后处理中采用本文方案以降低全站仪不稳定造成的干扰。在该技术支持下,圆满完成了高铁站台雨棚震动时序变化监测任务,验证了全站仪与相机结合方法的可行性,为铁路安全运营提供了根本保障。
[1] Nixon M S, Aguado A S. Feature Extraction and Image Processing (Second Edition) [M].Delhi : Replika Press Pvt Ltd, 2007
[2] Chen P Y, Arbee L,Chen P.Similarity-basedmotion Trackmanagement for Video Retrieval [J]. Journal of Information Science and Engineering,2006, 22(6):1 519-1 527[3] Li Z, Tao H.Research of Camshift Algorithm Totrack Motion Objects [J].Indonesian Journal of Electrical Engineering, 2013, 11(8): 4 372-4 378
[4] Fonseca P, Brussel H, Sas P.Motion and Vibration Control of a Flexible Structure [C]. International Modal Analysis Conference -IMAC,1999
[5] Thompson W B, Pong T C. Detecting Moving Object [J]. International Journal of Computer Vision, 1990(4):39-57
[6] Wu L D. Computer Vision[M]. 上海: 复旦大学出版社, 1993
[7] 李玲玲. 基于Harris-Affine和SIFT特征匹配的图像自动配准[J]. 华中科技大学学报:自然科学版, 2008, 36(8):13-16
[8] 董颖.基于光流场的视频运动检测[D].济南:山东大学, 2008 [9] 张泽旭, 李金宗, 李宁宁. 基于光流场分割和Canny边缘提取融合算法的运动目标检测[J].电子学报,2003,31(9):1 299-1 302 [10] 郑南宁. 计算机视觉与模式识别[M]. 北京:国防工业出版社, 1998
P234.1
B
1672-4623(2015)03-0145-03
10.3969/j.issn.1672-4623.2015.03.050
范登科,博士,工程师,主要研究方向为遥感图像处理与应用。
2015-02-11。
项目来源:中央高校博士生自主科研资助项目(2012213020206、410500015);铁道第三勘察设计院集团有限公司重点资助项目(721335)。
猜你喜欢
儿童故事画报·发现号趣味百科(2021年12期)2021-08-20
矿产勘查(2020年1期)2020-12-28
科学大众(2020年12期)2020-08-13
水电站设计(2020年4期)2020-07-16
文萃报·周二版(2020年23期)2020-06-19
工程与建设(2019年3期)2019-10-10
建筑科技(2018年2期)2018-10-25
装备制造技术(2018年5期)2018-07-11
中国公路(2017年18期)2018-01-23
电测与仪表(2016年9期)2016-04-12
