
基于LMS算法的压电驱动器控制通道数学模型辨识研究
2015-02-05 07:53孙亚飞
深圳信息职业技术学院学报 2015年1期
孙亚飞
(深圳信息职业技术学院机电工程学院,广东 深圳 518172)
基于LMS算法的压电驱动器控制通道数学模型辨识研究
孙亚飞
(深圳信息职业技术学院机电工程学院,广东 深圳 518172)
对基于LMS自适应算法的压电驱动器控制通道数学模型辨识方法进行系统研究。压电驱动器控制通道数学模型是基于FX-LMS控制算法的各类主动隔振或主动控制系统开发所必须的条件。首先对其进行详细的理论推导,并对其工程实现进行分析;在此基础上,开发基于LMS算法的压电驱动器控制通道辨识系统;最后应用该辨识系统对某基于压电堆驱动器的一维微振动主动隔振平台的控制通道数学模型进行辨识,以检测所研制辨识系统的可行性和有效性。测试结果表明所辨识的控制通道数学模型可以用于基于LMS自适应算法的控制系统的开发。
LMS算法;控制通道;数学模型;辨识
控制系统是基于压电智能结构的主动隔振系统及主动控制系统的核心部件,对控制效果起着决定性作用。而自动控制系统的实现则依赖于各类控制算法。
FX-LMS自适应算法是基于压电智能结构的主动隔振系统及主动控制系统中应用广泛的一种控制算法,具有控制效果好、实现简便等优点,并且可以对多输入多输出系统进行控制压电驱动器控制通道数学模型是基于FX-LMS控制算法的各类主动隔振或主动控制系统实现所必须的模块。压电驱动器控制通道数学模型辨识有多种方法,常见的有:基于LMS自适应算法;基于激励—响应信号;基于频率响应曲线。
通过对上述三种辨识方法的理论分析和实验研究,结果表明后两种辨识方法的工作量较大,对数据采集系统及测试设备的精度要求较高,且后处理过程带来的误差较大,从而给FX-LMS自适应控制算法的实现带来不便;而基于LMS自适应算法的压电驱动器控制通道数学模型辨 识方法对测试设备的要求简单(利用FX-LMS自适应控制系统即可),且无需后处理,同时LMS自适应算法最主要应用之一便是系统辨识,其辨识精度较高。
本文将对基于LMS自适应算法的压电驱动器控制通道数学模型的辨识方法进行详细研究,给出具体的理论推导和实现方法,并开发出一套辨识系统,以验证基于LMS自适应算法的压电驱动器控制通道数学模型辨识方法的可行性和有效性。
1 压电驱动器控制通道分析
本文所研究的压电驱动器控制通道是基于压电智能结构的主动隔振系统及主动控制系统中的一部分,通常指:压电堆驱动器或其他压电复合驱动器的激励信号输入端(图1中功率放大器输出端)到其振动加速度信号测量点之间的传输路径,具体如图1所示。

图1 压电驱动器控制通道结构示意图Fig.1 Structure map of the piezoelectric actuator control channel
为了便于工程开发,在实际应用中定义压电驱动器的控制通道为:从自动控制系统的DA输出信号到其AD输入信号之间的传输路径,包括滤波器、功率放大器、加速度传感器及传输导线等。
2 基于LMS算法的压电驱动器控制通道数学模型辨识算法推导
下面对基于LMS算法的压电驱动器控制通道数学模型辨识算法进行理论推导和实现说明。
2.1 基于LMS算法的控制通道数学模型辨识算法推导
基于LMS算法的压电驱动器控制通道数学模型辨识原理图如图2所示。
设输入信号向量x(n)为


图2 基于LMS算法的压电驱动器控制通道数学模型辨识原理Fig.2 Identification theory of the piezoelectric actuator control channel mathematic model based on LMS algorithm
则控制通道数学模型输出信号y(n)为


其中,d(n)为输入信号x(n)经过实际控制通道后所测得的振动加速度信号。
对误差信号e(n)取目标函数J(n)为


由最速下降法,得
其中,μ为步长因子,用于控制自适应过程的稳定性和收敛速度。
式(7)即为压电驱动器控制通道数学模型的辨识算法。
2.2 基于LMS算法的控制通道数学模型辨识算法实现
基于LMS算法的压电驱动器控制通道数学模型辨识算法的具体实现方法说明如下:
首先,采集信号发生器所产生的驱动信号x(n),同时更新输入信号向量x(n),并计算该输入信号向量与控制通道数学模型之间卷积,得到输出信号y(n);
然后,采集由该激励信号驱动压电驱动器控制通道所产生的振动加速度信号d(n),并计算误差信号e(n);
最后,由e(n)信号和输入信号向量x(n)进行控制通道数学模型更新。
3 基于LMS算法的压电驱动器控制通道数学模型辨识系统开发
下面应用所推导的辨识算法来开发一套压电驱动器控制通道数学模型辨识系统,具体按照硬件系统和软件算法两部分进行说明。
最后用该辨识系统对某压电堆驱动器的控制通道数学模型进行辨识,以验证其可行性和有效性。
3.1 硬件系统
基于LMS自适应算法的压电驱动器控制通道数学模型辨识系统主要由振动信号传感器(如:位移传感器、速度传感器、加速度传感器等)、基于PC机的LMS算法控制通道辨识处理系统、信号发生器、功率放大器、信号调理器(如低通滤波器等)等部分构成,其硬件框图如图3所示。
本文用加速度传感器来测量振动信号,并且用低通滤波器对测量到的振动加速度信号进行信号调理,以便于辨识处理系统的数据采集。

图3 基于LMS算法的压电驱动器控制通道数学模型辨识系统硬件框图Fig.3 Hardware block diagram of the piezoelectric actuator control channel mathematic model identification system based on LMS algorithm
3.2 软件算法
基于LMS自适应算法的压电驱动器控制通道数学模型辨识系统的软件算法用标准C语言开发环境—Turbo C3.1开发,其程序代码的编写依据本文前面的推导公式及实现分析进行,由于篇幅的关系,具体代码的实现这里不再赘述。
基于上述硬件系统和软件算法,本文所开发的基于LMS自适应算法的压电驱动器控制通道数学模型辨识系统实物图如图4所示。
图4 基于LMS算法的压电驱动器控制通道数学模型辨识系统实物图Fig.4 Picture of the piezoelectric actuator control channel mathematic model identification system based on LMS algorithm
4 应用实例
应用所开发的基于LMS自适应算法的压电驱动器控制通道数学模型辨识系统对某基于压电堆驱动器的一维微振动主动隔振平台的控制通道数学模型进行辨识,为该一维微振动主动隔振平台自适应控制系统的开发提供控制通道数学模型。
4.1 控制通道数学模型辨识
给定辨识条件为:
(1)信号发生器输出信号电压:2.0V;
(2)数据采集板(HY-8021)采样频率:2KHz(双通道),实际采样频率为2K/2=1KHz;
(3)压电堆控制通道数学模型采用FIR数字滤波器形式,阶数为16。
通过辨识系统的测试,得到的压电堆驱动器控制通道数学模型结果为:
H= {0.025,0.228,0.070,0.082,-0.100,-0.066,-0.027,-0.051,0.032,0.033,0.100,0.052,0.100,0.017,-0.017,-0.085}T。
4.2 隔振平台隔振效果分析
将上述辨识得到的压电驱动器控制通道数学模型应用于该一维微振动主动隔振平台的FX-LMS自适应控制系统开发,开发结果如下图5所示。

图5 一维主动隔振平台自动控制系统实物图Fig.5 Picture of the automation control system of the one dimension active isolation platform

图6 一维微振动主动隔振平台实物图Fig.6 Picture of the simulation vibration platform and the one dimension active isolation platform
利用图6所示一维主动隔振平台,对基于FXLMS自适应算法的隔振平台的隔振效果进行实验测试。其中,模拟振动台激振器输入信号频率设为30Hz,并对四种类型信号(正弦波、三角波、斜波及方波)均进行了隔振效果测试。
实验测试完毕后,根据所得到的实验数据,对该一维主动隔振平台在受控前、后的时域振动信号、频域振动信号进行了分析,给出了相关曲线。由于论文篇幅关系,本文只给出了三角波和方波激励信号作用下的隔振效果曲线,具体见图7、8所示。


图7 三角波激励信号作用时的隔振效果曲线图Fig.7 Graphs of the isolation effect actuated by triangle signal

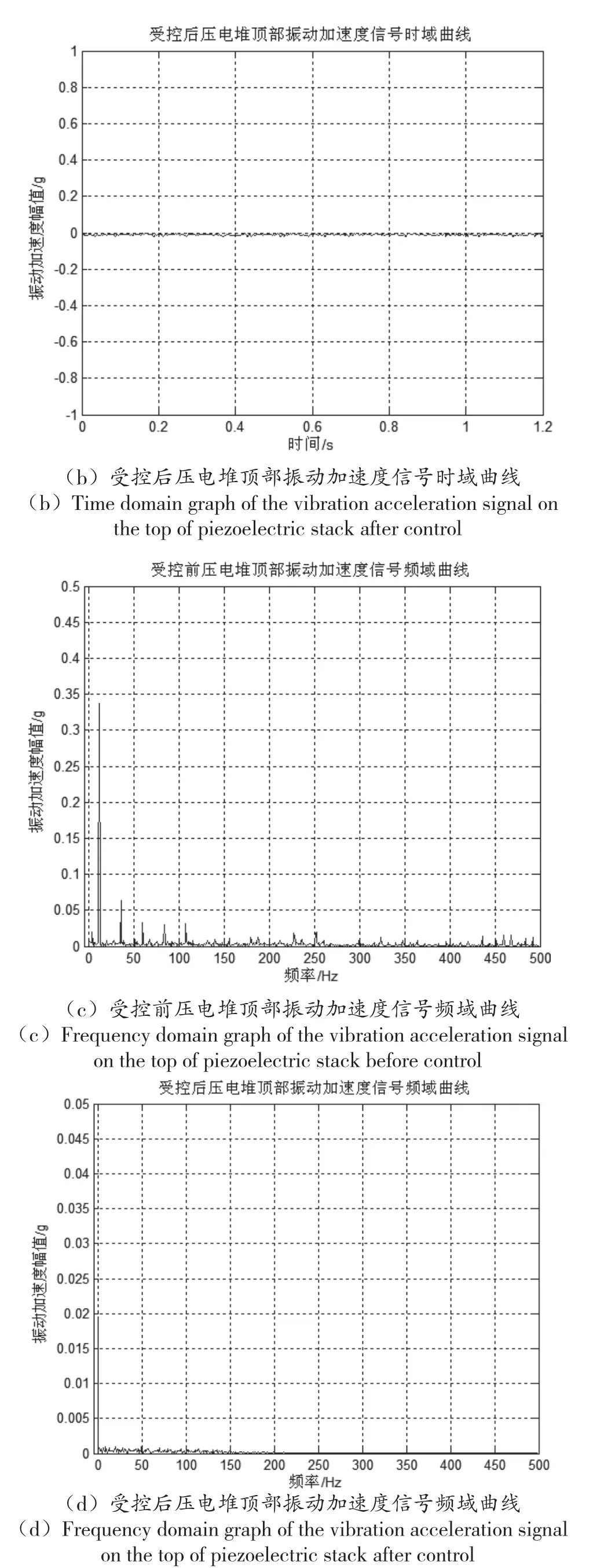
图8 方波激励信号作用时的隔振效果曲线图Fig.8 Graphs of the isolation effect actuated by square signal
由上述各曲线可以看出,基于FX-LMS自适应控制算法对该主动隔振系统在0~500 Hz频率范围内均具有良好的主动隔振效果,该FX-LMS自适应控制系统对低频宽带随机振动具有良好的抑制作用,从而证明了该辨识系统的可行性和有效性。
5 结论
本文对基于LMS自适应算法的压电驱动器控制通道数学模型的辨识方法进行了系统研究。
在对其进行详细的理论推导和工程实现过程分析的基础上,开发了一套基于LMS自适应算法的压电驱动器控制通道辨识系统,并应用该辨识系统对某基于压电堆驱动器的一维微振动主动隔振平台的控制通道数学模型进行了辨识。基于所辨识的控制通道数学模型而开发的一维微振动主动隔振平台控制系统,该一维微振动主动隔振平台取得了良好的隔振效果,从而证明了所研制的基于LMS自适应算法的压电驱动器控制通道数学模型辨识系统的可行性和有效性。
(
)
[1]黄大卫.数字滤波器[M].北京:中国铁道出版社,1991.HUANG Dawei.Digital Filter[M].Beijing:China Railway Publishing House,1991.(in Chinese)
[2]潘士先.谱估计和自适应滤波[M].北京:北京航空航天大学出版社,1991.PAN Shixian.Spectrum Estimation and Adaptive Filter[M].Beijing:Beihang University Press,1991.(in Chinese)
[3]邹国良.自适应滤波理论及应用[M].保定:河北大学出版社,1997.ZOU Guoliang.Adaptive Filter Theory and Applications [M].Baoding:Hebei University Press,1977.(in Chinese)
[4]解可新,韩立兴,林友联.最优化方法[M].天津:天津大学出版社,1997.XIE Kexin,HAN Lixing,LIN Youlian.The Optimization Method[M].Tianjin:Tianjin University Press,1997.(in Chinese)
[5]缑新科,管佩刚.基于自适应滤波前馈控制的结构振动抑制研究[J].电气自动化,2012,34(3):5-9.GOU Xinke,GUAN Peigang.Study of Structure Vibration Suppression Based on Adaptive Filter FeedforwardControl[J].Electrical Automation,2012,34(3):5-9.(in Chinese)
[6]孙煜博,秦建斌.压电智能悬臂梁最优控制建模与仿真[J].机械工程与自动化,2008,(02):59-61.SUN Yubo,QIN Jianbin.Modeling and Simulation of Piezoelectric Smart Cantilever Beam Based on Optimal Control System[J].Mechanical Engineering &Automation,2008,(02):59-61.(in Chinese)
[7]张桅,赵剡,张寅.基于dSPACE的频率特性测试与模型辨识研究[J].宇航计测技术,2010,30(1):57-60.ZHANG Wei,ZHAO Yan,ZHANG Yin.Research on dSPACE-Based Frequency Response Characteristic Measurement and Model Identification[J].Journal of Astronautic Metrology and Measurement,2010,30(1):57-60.(in Chinese)
[8]俞晓峰.基于Matlab的两轮自平衡小车系统模型辨识[J].机械工程与自动化,2012,(1):67-69.YU Xiaofeng.Two-wheel Self-balanced Vehicle System Model Identification Based on MATLAB[J].Mechanical Engineering &Automation,2012,(1):67-69.(in Chinese)
The Mathematic Model Identification of Piezoelectric Actuator Control Channel based on LMS Algorithm
SUN Yafei
(Mechanical and Electrical Engineering College,Shenzhen Institute of Information Technology,Shenzhen 518172,P.R.China)
The research work had been done on the control channel mathematic model of piezoelectric actuator using LMS adaptive algorithm.The control channel mathematic model of piezoelectric actuator is a necessary condition to develop many kinds of active isolation or vibration control system based on FX-LMS control algorithm.First,the detailed theory analysis had been derived on the LMS algorithm,and the realized process had been analyzed.Then based on it,the control channel mathematic model identification system had been developed using LMS algorithm.At last,it was used to identify some control channel mathematic model of one dimension micro vibration active isolation platform using piezoelectric stack actuator in order to test the feasibility and efficiency of the identification system we developed.The result includes that the identified control channel mathematic model can be used to develop control system based LMS adaptive algorithm.
LMS algorithm;control channel;mathematic model;identification
TP273
A
1672-6332(2015)01-0016-06
【责任编辑:高潮】
2014-12-25
深圳信息职业技术学院校级项目(lg201226);国家教育部博士点基金项目(20102302120046)
孙亚飞(1977- ),男(汉),安徽庐江人,副教授,博士后,主要研究方向:自动控制技术、仪器仪表、智能材料与结构等。E-mail:sunyf@sziit.edu.cn
猜你喜欢
电脑爱好者(2020年6期)2020-05-26
压电与声光(2019年1期)2019-02-22
铜仁学院学报(2018年6期)2018-07-05
制造技术与机床(2017年6期)2018-01-19
光学精密工程(2016年5期)2016-11-07
电源技术(2015年9期)2015-06-05
上海电机学院学报(2015年3期)2015-02-28
西安交通大学学报(2014年7期)2014-04-16
组合机床与自动化加工技术(2014年12期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01
