
基于共轭噪声组的宽带噪声雷达机动目标参数估计
2015-02-05 06:48钊顾红苏卫民陈志仁陈金立
电子与信息学报 2015年5期
王 钊顾 红苏卫民陈志仁陈金立
①(南京理工大学电子工程与光电技术学院 南京 210094)
②(南京信息工程大学电子与信息工程学院 南京 210044)
基于共轭噪声组的宽带噪声雷达机动目标参数估计
王 钊*①顾 红①苏卫民①陈志仁①陈金立②
①(南京理工大学电子工程与光电技术学院 南京 210094)
②(南京信息工程大学电子与信息工程学院 南京 210044)
宽带噪声雷达参数估计时通常会采用宽带互模糊函数的方法,但是在处理机动目标时这种方法需要在距离、速度及加速度3维搜索而导致运算量巨大,为此该文提出一种基于共轭噪声组的机动目标参数估计算法。该算法首先根据回波伸缩效应预设多路通道,每路通道截取固定长度的噪声组内信号进行混频,然后利用分数阶傅里叶变换(FrFT)估计混频信号的多普勒相位,根据相位信息构造补偿函数,并对补偿后的噪声组信号利用频域尺度相关(FSC)算法估计回波的时延,最后联立多普勒相位及时延信息获取目标的距离、速度和加速度。该算法避免了目标参数3维搜索的过程,无需时域重构回波信号,较宽带互模糊函数方法极大地降低了运算量,整个算法都可通过快速傅里叶变换(FFT)实现,便于系统实时处理。仿真结果验证了该算法的有效性及优势。
宽带噪声雷达; 共轭噪声组; 分数阶傅里叶变换; 频域尺度相关
宽带噪声雷达由于具有测距精度高、距离速度无模糊、截获概率低、抗干扰能力强等优点,受到广泛的关注[1,2]。随着隐身战斗机和超高速战斗机的发展,对机动目标的有效探测是当今雷达的研究热点。为了提高探测性能,通常会采用长时间积累的方法。对于宽带噪声雷达而言,会存在以下问题:(1)与匹配滤波器失配相关的多普勒敏感问题;(2)由回波包络的伸缩变换而导致的多普勒色散现象;(3)长时间积累过程中由于加速度引起的多普勒展宽;(4)由于多普勒域的采样频率较低而产生多普勒模糊。
近年来,很多学者在改善噪声雷达动目标探测性能方面提出了解决方法。针对噪声雷达的多普勒敏感问题,文献[3]设计了一种宽带相关噪声雷达系统,通过可变的延迟线来控制参考信号的时延,并进一步估计出回波的多普勒频率。文献[4]将多重信号分类(MU ltiple SIgnal Classification, MUSIC)算法运用到该系统中来,从而提高了多普勒频率的分辨力。文献[5]将互模糊函数用到噪声雷达的时延和多普勒联合估计中来,从而有效地解决噪声雷达的多普勒敏感问题。考虑到多普勒色散现象,文献[6]利用分段短时相关的方法,将包络的伸缩变换理解为时变的距离走动,但是这种方法仅适用于多普勒色散积较小的情况。文献[7]采用宽带互模糊函数来联合估计时延及速度,但是这种方法在用于噪声信号时通常需要构造不同尺度和时延的参考信号,运算量较大,不利于工程实现。文献[8]将宽带互模糊函数扩展到宽带距离-速度-加速度互模糊函数来处理机动目标,但是这种方法需要3维参数搜索,运算量巨大。
与之前基于互模糊函数算法的研究不同,本文给出一种基于共轭噪声组的雷达信号处理算法,用于实现机动目标距离、速度及加速度的联合估计。本算法首先根据伸缩效应截取回波中的有效数据,然后将截取后的噪声组内信号混频,并对混频信号作分数阶傅里叶变换(Fractional Fourier Transform,FrFT)以估计回波多普勒信息,接着构造相位补偿函数并利用频域尺度相关(Frequency-domain Scale Correlation, FSC)估计整段噪声组信号的时延信息,最后通过已得的多普勒信息与时延信息联合估计出目标的距离、速度及加速度。本文算法采用先多普勒估计后时延估计的方式避免了互模糊函数的3维搜索过程,通过回波预处理及FSC方法补偿回波包络的伸缩效应来替代互模糊函数的时域插值运算,整个算法都可通过快速傅里叶变换(Fast Fourier Transform, FFT)实现,运算复杂度较低。计算机仿真验证了本文算法的有效性。
2 宽带机动目标建模
假设存在匀加速运动的单个点目标,信号发射时目标初始距离为R0,径向速度为 v≪c,加速度为a,那么雷达接收的基带回波信号可以表示为[9]





其中U表示信号能量,R(τ)为u( t)的归一化自相关函数,ε=1-α。将式(4)代入式(3)可得



针对这种情况,文献[8]给出了一种宽带距离-速度-加速度互模糊函数的算法,该算法通过构造与目标速度及加速度对应的参考信号,来达到匹配滤波的效果。由于通常情况下,目标的距离,速度和加速度都是未知的,该算法需要进行3维的参数空间搜索,并且在构造参考信号时重采样的运算复杂度较高。为了解决这一问题,根据噪声信号的特性,本文提出一种共轭噪声交替发射的信号形式及对应的参数估计算法。
3 共轭噪声组机动目标参数估计
3.1 共轭噪声组回波预处理
假设雷达发射信号S( t)为连续的两段宽带共轭噪声信号,其表达式为

其中,u( t)=exp[jθ( t )], θ(t)为随机相位,f0为载频,T表示每段信号的时宽,信号形式如图1所示。
该共轭噪声信号的基带回波信号Sr( t)可以表示为
其中n=1,2,…, L , m=1,2,…, L, L为目标数,φ(t)表示回波信号的多普勒信息。从回波数据中截取相邻的两段时宽为T的信号作混频处理,为了方便论述,将混频结果表示为回波包络与多普勒信号乘积的形式


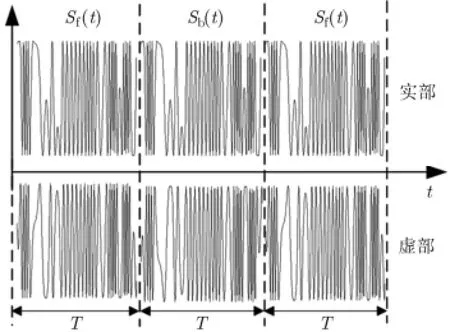
图1 共轭噪声基带信号波形示意图
当T= T/αn时,两段信号的混频结果可以表示为

3.2 多普勒频率估计
在回波预处理之后,当混频信号中的包络部分近似为1时,剩下的只有多普勒频率的部分Ffb( t, n, m),根据式(1)回波的相位信息,φ(t)应为

由式(13)可知,此时的多普勒频率部分Ffb( t, n, m)实际上为线性调频信号,其一次相位项P1和二次相位项P2包含了目标的时延,速度及加速度信息,通过对P1和P2的估计,进而可得目标的运动参数。分数阶傅里叶变换是近年来使用较多的线性调频信号参数的时频分析方法[11,12],对式(13)给出的多普勒频率部分Ffb( t, n, m)进行分数阶傅里叶变换,可得


3.3 频域尺度相关运算
噪声信号的多普勒敏感特性可以通过多普勒补偿来抑制,忽略常数相位项,由式(13)可得需要构造的相位补偿函数为

将式(16)代入,相位补偿函数可以用P1和P2表示为

为了获得最大的信噪比增益,这里拼接Sr( t)的两段信号到一起进行联合处理,并将构造的相位补偿函数与Sr( t)相乘,可得

将相位补偿以后的信号Src( t)与ubi( t)进行尺度为α的相关运算,可得


式中F[·]表示傅里叶变换,F-1[·]表示逆傅里叶变换,Src( f)为Src( t)的频谱,R[·,α]表示以α为尺度的频谱重构运算,具体重构运算的方法见文献[15],这里不再赘述。这种在频域实现信号重构及相关运算的过程本文称之为频域尺度相关(FSC)运算。

3.4 时延估计误差分析

在宽带情况下,匹配滤波器的时宽仍然为2T,但回波信号由于伸缩效应时宽变为2T/α,致使宽带相关函数的时宽为2T+ 2 T/α,此时目标实际时延应为

其中τM表示匹配滤波器的时延测量值。式(23)中的α为与目标速度相关的尺度因子,可见对于宽带噪声信号来说,时延的测量值与速度是耦合的,将α˜n代入可得FSC运算后时延的真实值与测量值之间的关系为
3.5 多普勒解模糊方法
当FrFT的分数阶域欠采样时,式(16)用目标参数来表示为

其中η表示分数阶域模糊数。将式(26)代入式(18)可得修正的相位补偿函数为

当相位补偿函数不准确时,Src( t)与参考信号是失配的,因此可以构造代价函数来搜索η值

由于每路通道的目标速度范围是已知的,代价函数的搜索次数可以有效地降低。
在确定η值以后,将式(28)带入式(26),并与式(25)联立就可以得到目标参数的估计值为

式(29)中的参数求解过程是按照an→ vn→τn的顺序进行的,这里认为在计算下一个参数时上一个参数为已知量,可以直接代入。
3.6 虚假目标
在之前的讨论中,都是假设混频信号为同一目标回波的情况。当混频信号为不同目标回波时,根据3.1节的讨论结果,若两目标速度刚好与相同的多普勒通道匹配,且两目标时延满足一定关系时,对其混频信号进行FrFT亦可以估计出相应多普勒相位,但是通过式(27)的方法构造的相位补偿函数不能与任何目标回波匹配,在后续的FSC运算中将无法检测出目标,可以在FSC以后设置门限将此虚假目标剔除。
3.7 算法步骤
综上所述,图2给出共轭噪声组信号估计机动目标参数的流程图,具体步骤为:
步骤1 根据不同的包络伸缩情况分多个通道对回波信号进行预处理,每个通道按照不同的速度选取时宽为的回波信号,根据目标最大速度 vmax可得通道数为。



步骤5 根据P1和P2以及时延τMn的估计结果,利用式(29)逐次计算出目标的距离、速度及加速度。
4 运算量分析

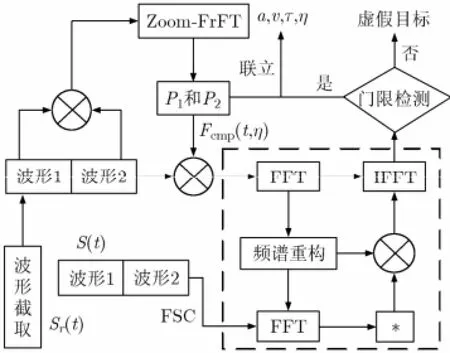
图2 算法流程框图
5 仿真分析
本节将通过距离-速度-加速度星座图、参数估计均方根误差曲线及运算时间曲线这3个方面来验证所提宽带噪声雷达参数估计算法的有效性和优势。参数设置为:假设雷达信号为连续波宽带共轭噪声组信号,信号载频f0= 10 GHz ,带宽B=25 MHz,噪声组信号时宽为T=100 ms,采样频率Fs= 60 MHz。
图3给出了多目标情况下的距离-速度-加速度星座图的结果,图中目标距离分别为{300,400,500} km,速度分别为{0.75,1.72,1.502} km/s,加速度分别为{200,300,500} m/s2,信噪比同为10 dB。从图3可以看出,本文算法可以对目标的3个参数进行准确的估计,且同时估计多个目标。

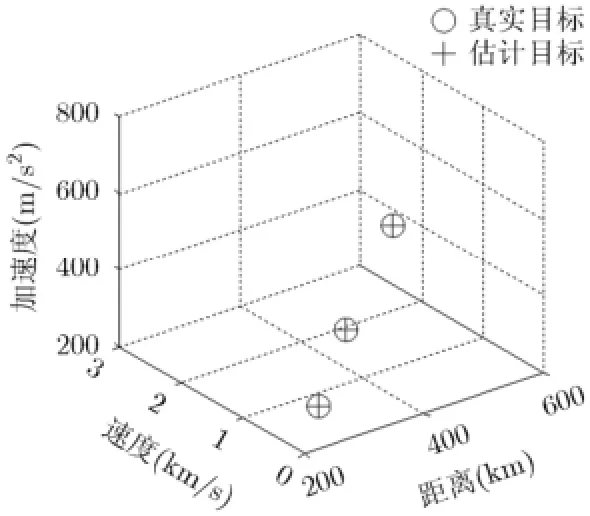
图3 距离-速度-加速度星座图
图5给出了本文方法与互模糊函数方法的运算时间比值与采样数的关系图,其中通道数为16路,速度搜索1000次,加速度搜索1000次,将信号时宽设置为16.7~167.0 ms(样本点数为1× 106~1× 107点)变化,步进间隔为16.7 m s,Monte Carlo实验为100次。可以看出,本文方法的运算时间要明显低于互模糊函数的运算时间,且这种优势随着采样点数的增加愈加显著,其中当时宽为100.0 m s(6× 106点)时,互模糊函数方法的运算时间约为本文方法的3× 108倍。

图4 参数估计的均方根误差曲线

图5 运算复杂度对比
6 结束语
宽带噪声雷达在机动目标探测时存在多普勒敏感、多普勒色散、多普勒展宽及多普勒模糊的问题,互模糊函数的方法可以解决这些问题,但是其运算复杂度高而难以满足实时性要求。本文提出了一种基于共轭噪声组信号的机动目标参数估计方法,该方法通过回波预处理及FSC运算补偿回波的伸缩效应,无需高计算复杂度的时域重构运算;而且采用先多普勒估计后时延估计的方式,避免了互模糊函数的3维搜索过程;此外,所涉及的Zoom-FrFT及FSC运算都可通过FFT实现,利于工程应用。仿真结果表明,本文方法可以显著减小运算复杂度,并且在高信噪比的情况下拥有与互模糊函数方法相近的参数估计性能。
[1] Sun Hong-bo, Lu Y i-long, and Liu Guo-sui. U ltra-w ideband technology and random signal radar: an ideal combination[J]. IEEE Aerospace and Electronic System s Magazine, 2003,18(11): 3-7.
[2] 刘国岁, 顾红, 苏卫民. 随机信号雷达[M]. 北京: 国防工业出版社, 2005: 26-30. Liu Guo-su i, Gu Hong, and Su W ei-m in. Random Signal Radar [M]. Beijing: National Defense Industry Press, 2005: 26-30.
[3] Narayanan R M and Dawood M. Doppler estimation using a coherent ultraw ide-band random noise radar[J]. IEEE Transactions on Antennas and Propagation, 2000, 48(6): 868-878.
[4] Dawood M, Quraishi N, and A lejos A V. Superresolution Doppler estimation using UWB random noise signals and MUSIC[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(1): 325-340.
[5] M alanow ski M and Kulpa K. Detection of m oving targets w ith continuous-wave noise radar: theory and measurements[J]. IEEE Transactions on Geoscience and Rem ote Sensing, 2012, 50(9): 3502-3509.
[6] Axelsson S R J. Random noise radar/sodar w ith u ltraw ideband waveform s[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007, 45(5): 1099-1114.
[7] Jin Q, W ong K M, and Luo Z Q. The estimation of time delay and Dopp ler stretch of w ideband signals[J]. IEEE Transactions on Signal Processing, 1995, 43(4): 904-916.
[8] M alanow ski M, Kulpa K, and Olsen K E. Extending the integration tim e in DVB-T-based passive radar[C]. P roced ings of European Radar Conference (EURAD),M anchester, UK, 2011: 190-193.
[9] W eiss L G. W avelets and w ideband correlation processing[J]. IEEE Signal Processing Magazine, 1994, 11(1): 13-32.
[10] 王钊, 顾红, 苏卫民, 等. 宽带高斯型功率谱噪声信号相关特性分析[J]. 电波科学学报, 2013, 28(6): 1047-1053. W ang Zhao, Gu Hong, Su W ei-m in, et al.. Correlation analysis of noise signal w ith w ideband Gaussian power spectrum[J]. Chinese Journal of Radio Science, 2013, 28(6): 1047-1053.
[11] Chen Xiao-long, Guan Jian, Bao Zhong-hua, et al.. Detection and extraction of target w ith m icrom otion in spiky sea clutter via short-tim e fractional Fourier transform[J]. IEEE Transactions on Geoscience and Rem ote Sensing, 2014, 52(2): 1002-1018.
[12] Shen Li-ran, Yin Qing-bo, Lu M ing-yu, et al.. Linear FM signal parameter estimation using STFT and FrFT[J]. Chinese Journal of Electronics, 2013, 22(2): 301-307.
[13] Ozaktas H M, A rikan O, Ku tay M A, et al.. D igital com putation of the fractional Fourier transform[J]. IEEE Transactions on Signal Processing, 1996, 44(9): 2141-2150.
[14] Zhao Xing-hao, Tao Ran, and W ang Yue. A fast algorithm for fractional Fourier transform w ith zoom ing-in ability[C]. Proceedings of 4th International Conference on W ireless Comm unications, Networking and M obile Com puting, Dalian,Ch ina, 2008: 1-4.
[15] Bi G, M itra S K, and Li S. Samp ling rate conversion based on DFT and DCT[J]. Signal Processing, 2013, 93(2): 476-486.
王 钊: 男,1985年生,博士生,研究方向为随机信号雷达及宽带信号处理.
顾 红: 男,1967年生,博士,教授,博士生导师,研究方向为噪声雷达、高速目标探测、M IMO雷达信号处理.
苏卫民: 男,1959年生,博士,教授,博士生导师,研究方向为阵列信号处理和雷达成像.
Parameter Estimation of Maneuvering Targets in W ideband Noise Radar Based on Con jugate Noise Group
Wang Zhao①Gu Hong①Su Wei-m in①Chen Zhi-ren①Chen Jin-li②①(Schoo l of E lectronic Engineering & Optoelectronic Techno logy, Nanjing University of Science & Technology, Nanjing 210094, China)
②(College of Electronic and Information Engineering, Nanjing University of Information Science and Technology, Nanjing 210044, China)
The w ideband cross-ambiguity function method is commonly adopted to execute the parameter estimation of w ideband noise radar, but it needs three-dimensional search in distance, velocity and acceleration when dealing w ith maneuvering targets, which takes huge com putation burden. A novel method based on the conjugate noise group is p roposed for addressing the p rob lem of parameter estimation of maneuvering targets. Firstly, the multiple channel is set up according to the echo stretching effect, and the internal signals of the noise group is cut out in fixed length for m ixing in each channel. Then the Doppler phase is estimated with the m ixed signal by Fractional Fourier Transform (FrFT). The Phase com pensation function is constructed by the Doppler phase and the delay is estimated by Frequency-domain Scale Correlation (FSC) algorithm w ith the com pensated noise group signal. Finally, the range, velocity and acceleration are obtained by the two simultaneous equations of the Dopp ler phase and delay. The proposed m ethod avoids th ree-dimensional search and reconstruction of the echo signal in tim e domain, w hich reduces a large amount of com pu tation com pared to the w ideband cross-ambiguity function method. The method is feasible for real time p rocessing as the whole algorithm can be accom plished by Fast Fourier Transform (FFT). The effectiveness and superiority of the proposed method are demonstrated by the simulation resu lts.
W ideband noise radar; Conjugate noise group; Fractional Fourier Transform (FrFT); Frequencydomain Scale Correlation (FSC)
TN957.51
: A
:1009-5896(2015)05-1071-07
10.11999/JEIT140737
2014-06-03收到 ,2014-09-28改回
国家部级基金,教育部博士点基金(20113219110018),中国航天科技集团公司科技创新基金(CASC04-02),国家自然科学基金(61302188)和江苏省自然科学基金(BK 20131005)资助课题
*通信作者:王钊 alife_numone@126.com
猜你喜欢
今日农业(2022年15期)2022-09-20
北京航空航天大学学报(2021年9期)2021-11-02
文苑(2020年7期)2020-08-12
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
中外医疗(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
电测与仪表(2016年17期)2016-04-11
火控雷达技术(2016年1期)2016-02-06
电子器件(2015年5期)2015-12-29
