
模糊PID在硫熏强度串级比值控制系统中的应用
2015-01-27 08:10:35司亚楠毛汉领黄福川卢朝霞
自动化与仪表 2015年6期
司亚楠,毛汉领 ,黄福川,卢朝霞
(1.广西大学 机械工程学院,南宁 530004;2.广西大学 化学化工学院,南宁 530004)
目前,亚硫酸法制糖工艺中,参与硫熏中和的SO2是通过燃烧硫磺获得的。针对传统燃硫法存在的气体外泄、管道腐蚀、操作复杂和硫熏强度难以控制等问题,有研究表明压缩罐装的液态SO2在理论上完全可以代替传统的燃硫法获得的硫气用于硫熏中和,并且具有生产工艺简化、设备投入减少、环境污染小和便于自动化控制等优点[1-2]。在新工艺中,液态SO2需要经过气化和与空气混合配比后通入硫熏中和器,其中SO2的浓度控制是关键,硫熏强度是最终控制目标。根据新工艺的控制要求,将串级控制与双闭环比值控制进行组合,设计分别以SO2和空气为主副物料的硫熏强度串级-双闭环比值控制系统,该系统可以实现SO2的流量随着硫熏强度的变化要求而变化,在一定程度上可以保证硫熏强度的稳定。
但是,考虑到制糖澄清工段的复杂工况和变比值控制系统的非线性、大滞后等特点,本文同时对该控制系统的各回路控制器的类型选择进行综合考虑,设计模糊PID控制器用于硫熏强度控制回路。仿真结果表明,与PID控制相比,基于模糊PID控制的硫熏强度串级-双闭环比值系统可以获得较好的硫熏强度控制效果。
1 控制系统的实现方案

图1 硫熏强度串级比值控制系统原理框图Fig.1 Principle diagram of sulfitation intensity cascade ratio control system
当硫熏强度受到外界干扰出现偏差时,SO2流量控制器的设定值发生改变,系统通过调节SO2流量来调整硫熏强度使其重新稳定在设定值;空气流量控制器的设定值也发生改变,系统通过变频调速调整罗茨风机的风量,保持二者比值不变,即SO2浓度恒定。当SO2流量或者空气流量受到干扰时,系统通过各自闭环回路快速调节使系统稳定。
2 模糊PID控制器设计
模糊PID控制器由模糊控制器和PID控制器两部分构成,其结构框图如图2所示[5]。
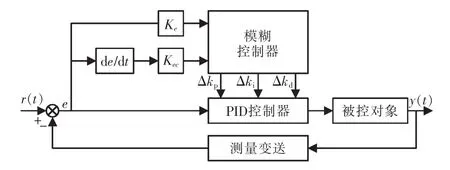
图2 模糊PID控制器结构框图Fig.2 Structure diagram of Fuzzy-PID controller
模糊PID控制器在线运行时,将检测到的e和ec输入到模糊控制器,经模糊化、模糊推理和去模糊化后输出参数调整量 Δkp、Δki、Δkd, 从而实现对PID控制器参数kp、ki和kd的自整定,以此来满足e和ec的变化要求。
模糊PID控制器的具体设计如下:
1)确定模糊控制器的维数。本文采用的是二维输入、三维输出的模糊控制器。分别以硫熏强度偏差e和偏差变化率ec为输入,PID参数的修正量Δkp、Δki、Δkd为输出。
2)选取模糊语言变量,确定变量论域。设输入参数的语言变量为E和EC,输出参数的语言变量为 ΔKP、ΔKI、ΔKD。输入和输出变量的模糊论域均定义为[-6,+6],模糊论域按 7个档级进行划分,其对应的模 糊 子 集 为 [NB,NM,NS,ZO,PS,PM,PB]。
3)确定变量的基本论域、量化因子和比例因子。偏差e和偏差变化率ec的基本论域均为[-0.5,+0.5],量化因子ke=kec=12。Δkp的基本论域为[-0.1,+0.1],比例因子kup=0.018;Δki的基本论域为[-0.00006,+0.00006],比例因子 kui=0.00001;Δkd的基本论域为[-0.6,+0.6],比例因子kud=0.1。
4)确定各语言变量论域上的隶属函数。输入变量和,输出变量 ΔKP、ΔKI、ΔKD均选用工程上常用的三角形隶属函数(trimf)。
5)制定模糊控制规则。模糊控制规则是人们根据手动调节控制系统的经验,总结出的变化量与控制量之间的因果对应规律。模糊控制规则的制定以偏差和偏差的变化趋势来消除偏差为基础,通过模糊推理和试验加以修正。根据PID参数的基本整定原则和蔗汁澄清工段硫熏中和过程的实际操作经验, 得到 ΔKP、ΔKI、ΔKD的模糊控制规则分别如表1,表 2和表 3所示[6]。
(ⅱ) 对任意F∈CIrr(X),若Fδ∩f-1(U)≠Ø,f(Fδ)∩U≠Ø,由f(Fδ)⊆(f(F))δ,(f(F))δ∩U≠Ø。注意到U∈σCSI及f(F)∈CIrr(Y),于是f(F)∩U≠Ø,F∩f-1(U)≠Ø,从而f-1(U)∈τCSI。

表1 ΔKP的模糊控制规则表Tab.1 Fuzzy control rule of ΔKP

表2 ΔKI的模糊控制规则表Tab.2 Fuzzy control rule of ΔKI

表3 ΔKD的模糊控制规则表Tab.3 Fuzzy control rule of ΔKD
6)解模糊。把模糊量转换为精确量的过程称为解模糊(defuzzification)。解模糊的方法有最大隶属度法、重心法、中位数法、系数加权平均法等多种方法。本文采用重心法,即取模糊隶属度曲线与横坐标轴围成的面积的重心为代表点,计算公式为

根据以上步骤可以计算出在不同偏差和偏差变化率下的PID参数调整量,则模糊PID控制器的参数整定算式为

式中,kp0、ki0和kd0为PID控制器的初始参数。
3 仿真分析
3.1 模糊推理系统的编辑
在Matlab命令窗口输入fuzzy,打开FIS编辑器建立一个Mamdani型的模糊控制器。根据前面模糊PID控制器的设计过程分别输入E、EC和ΔKP、ΔKI、ΔKD的隶属函数和量化区间。最后,打开模糊规则编辑窗口,根据表1建立模糊控制规则,具体形式如下:

取与方法 (and method)为min,取或方法(or method)为 max,推理方法(implication)为 min,合成方法(aggregation)为 max,解模糊方法(defuzzification)为centroid。在模糊推理系统(FIS)编辑完成后,可以观察模糊控制规则和模糊推理输出曲面,将其保存为fis文件,以便用Simulink进行系统仿真时调用。
3.2 仿真模型
硫熏强度控制系统的数学模型主要由变频器频率与罗茨风机输出风量、电动调节阀开度与SO2流量、配比后的SO2流量与硫熏强度3个环节构成,均可近似为一阶惯性纯滞后模型[7]。其中,SO2流量对象、空气流量对象和硫熏强度对象的传递函数分别取为


基于Matlab/Simulink建立硫熏强度控制器分别为PID控制器和模糊PID控制器,双闭环比值控制主副回路控制器均为常规PID控制器的硫熏强度串级-双闭环比值控制系统仿真模型。其中,PID Controller,Fuzzy Logic Controller 和 Fuzzy PID Controller分别代表PID控制器、模糊控制器和模糊PID控制器,均为根据相关控制原理在Simulink环境中建立和封装的自定义模块[8]。硫熏强度控制器为模糊PID控制的仿真模型和PID控制的仿真模型相同,硫熏强度控制方式有区别。
3.3 PID参数整定
PID控制器的参数整定方法有很多,本文考虑采用工程上常用的临界比例度法[9-10]。首先整定SO2流量控制器的PID参数,结果为振荡周期Tcr=29 s,kp1=0.1,ki1=0.01,kd1=0;其次整定空气流量控制器的PID参数,结果为振荡周期 Tcr=29 s,kp2=0.15,ki2=0.008,kd2=0;最后整定硫熏强度控制器的PID参数即模糊PID控制的初始参数,结果为振荡周期Tcr=165 s,kp=0.52,ki=0.0018,kd=12.5。
3.4 仿真结果
根据前文所建立的系统仿真模型和各控制回路的PID参数整定结果,分别对硫熏强度PID控制和模糊PID控制系统进行仿真。设定硫熏强度为24且受幅度为硫熏强度设定值10%的随机干扰,即干扰范围 (-2.4,2.4)。设定SO2流量与空气流量的比值为 1∶6,即混合后 SO2浓度为 14.3%,介于 12%和16%之间,且空气流量受幅度为2.4的随机干扰,SO2流量受幅度为0.2的随机干扰。设定PID参数、模糊控制器的量化因子和比例因子等参数,其中ke=12、kec=12、kup=0.018、kui=0.00001、kud=0.1, 运行系统仿真模型,分别进行PID仿真和模糊PID仿真。硫熏强度、SO2流量、空气流量和流量比值等参数的仿真结果通过simout模块传送到工作空间中,如图3和图4所示。
由图3和图4可以看出,硫熏强度的稳态值为24,SO2流量的稳态值约为4,空气流量的稳态值在25附近上下波动,空气与SO2流量比值基本为6,与设定值保持一致,即SO2浓度保持恒定。硫熏强度控制器采用PID控制时,硫熏强度的响应速度慢,超调量较大,SO2流量和空气流量存在较大的波动;采用模糊PID控制时,硫熏强度几乎无超调,SO2流量和空气流量的波动也较小,明显改善了硫熏强度的控制效果。

图3 硫熏强度响应曲线对比Fig.3 Comparison of sulfitation intensity response curves

图4 流量响应曲线对比Fig.4 Comparison of flow response curves
4 结语
本文通过对罐装SO2代替传统燃硫法获得的硫气用于制糖澄清工段新工艺进行分析,建立了硫熏强度串级-双闭环比值控制系统方案、提出了硫熏强度控制器采用模糊PID控制的方法、设计了模糊PID控制器。硫熏强度串级-双闭环比值控制系统分别采用PID控制和模糊PID控制和模糊PID进行仿真。仿真结果表明,与PID控制相比,采用模糊PID控制的硫熏强度几乎无超调,SO2浓度稳定,具有超调量小、响应速度快和稳态性能好等优点,能够很好地解决罐装SO2用于硫熏中和时硫熏强度精确控制的问题。同时,仿真也验证了模糊PID控制的可行性,为罐装SO2实际应用于制糖澄清提供了理论基础。
[1]邱汉华,李琳.液态二氧化硫在糖汁澄清过程中应用的初步研究[J].甘蔗糖业,1995(6):35-39.
[2]郭海蓉,张思原,陈赶林,等.蔗汁硫熏中和过程SO2的化学吸收[J].甘蔗糖业,2005(5):24-27.
[3]李杰春,史云飞,刘广为.氧化炉温度控制方案的技术改进[J].石油化工自动化,2005(1):22-24.
[4]李文涛.过程控制[M].北京:科学出版社,2012.
[5]席爱民.模糊控制技术[M].西安:西安电子科技大学出版社,2008.
[6]屈毅,宁铎,刘飞航,等.模糊PID控制器的设计及其仿真[J].计算机仿真,2009,26(12):130-132.
[7]刘豹,唐万生.现代控制理论[M].北京:机械工业出版社,2012.
[8]刘金琨.先进PID控制及其MATLAB仿真[M].北京:机械工业出版社,2003.
[9]郭阳宽,王正林.过程控制工程及仿真:基于Matlab/Simulink[M].北京:电子工业出版社,2009.
[10]孙跃光,林怀蔚,周华茂,等.基于临界比例度法整定PID控制器参数的仿真研究[J].现代电子技术,2012,35(8):192-194.
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
测控技术(2018年10期)2018-11-25 09:35:52
黑龙江电力(2017年1期)2017-05-17 04:25:05
环境科技(2016年5期)2016-11-10 02:42:12
西南交通大学学报(2016年3期)2016-06-15 20:29:35
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2016年2期)2016-02-27 09:04:56
电源技术(2015年11期)2015-08-22 08:50:38
