过采样技术在智能电气阀门定位器中的应用
2015-01-27 06:38:06
自动化与仪表 2015年1期
(中环天仪股份有限公司,天津 300384)
在智能阀门定位器设计中,数据采集单元(模/数转换器)主要用于采集4~20 mA控制信号和阀门开度信号,并将其转换为数字信号,以便微机系统处理[1]。当信号很微弱或信号变化量很小时,低分辨率的模/数转换器将检测不到信号或信号的变化,从而无法实现高精度定位控制。目前通常采用以下2种方法解决上述问题:一种是先将信号放大滤波,再用低或中分辨率的AD转换器进行采样,转化为数字信号后,再做信号处理;另一种是使用高分辨率AD转换器,对微弱信号直接采样,再进行数字信号处理。2种方法各有千秋,也都有自己的缺点。前一种方法,AD转换器要求不高,特别是现在大部分微处理器都集成有低或中分辨率的AD转换器,大大节省了开支,但是增加了繁琐的模拟电路。后一种方法省去了模拟电路,但是对AD转换器性能要求高,且高分辨率AD转换器价格昂贵[2-4]。本文基于智能阀门定位器硬件设计,在对信号进行简单滤波放大后,采用过采样技术将10位AD转换器分辨率提高到12位,提高阀门定位器控制精度的同时,避免采用昂贵的片外AD转换器,降低产品成本。
1 过采样原理
过采样技术是以远高于奈奎斯特采样频率的频率对模拟信号采样。过采样技术提高AD转换器的分辨率理论分析如下:
由信号采样量化理论可知,N位的AD转换器其量化步Δ长定义为

式中,Vref为参考电压,则量化误差eq:

在量化过程中,量化误差被认为是一种加性白噪声,是在-Δ/2到Δ/2之间均匀分布的随机变量,随机变量的方差,代表噪声的平均功率:

则带内噪声功率为

式中:fm为信号最高频率;fs为信号采样正频率。在这里,定义过采样率OSR为

通过式(1)~式(5)得到噪声功率与过采样率和分辨率的关系为

由式(6)推导可以得出有效位数N:

每增加一位分辨率,需要以4倍的采样频率进行过采样,即:

式中:w是希望增加的分辨率位数;fs是初始采样频率;fos是过采样频率[5]。
通过以上分析可知,过采样技术提高分辨率的必要条件是:引入到信号的噪声必须逼近白噪声,且噪声幅度足够大,能引起输入信号随机变化。因此在实际应用中,通常有意引入这种噪声,称为扰动[6]。
2 Matlab仿真
以上述理论为依据,利用Matlab对过采样技术提高AD转换器的分辨率及信噪比进行仿真。仿真结果如图1~图3所示,其中原始信号S(t)=0.1cos(2π ft),f=1 Hz,初始采样频率fs=4 Hz,过采样频率fos=64 Hz。
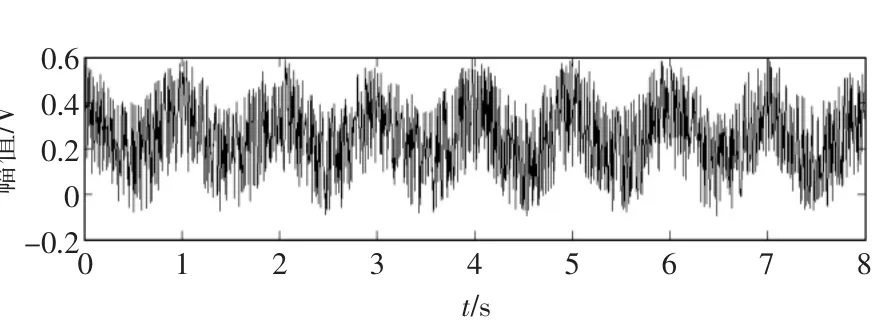
图1 仿真环境下原始信号Fig.1 Original signal in simulation
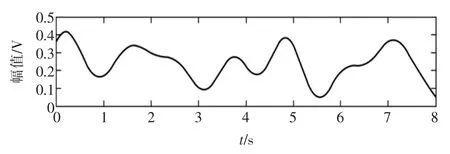
图2 未叠加噪声激励信号时重构原始信号Fig.2 Signal after oversampled D/A conversion without stimulating noise signa

图3 叠加方波信号时重构原始信号Fig.3 Signal after oversampled D/A conversion with squarewave as stimulating noise signal
对比图2和图3可以得出:叠加方波信号作为噪声激励信号后,结合过采样,重构的信号失真很小,可以看出明显的正弦波形。
3 实验方案及结果分析
在智能阀门定位器设计中,采用Renesas M16C/ 62P M30626微处理器,利用其自带10位AD转换器采用过采样和求均值技术实现12位的分辨率。
本文利用瑞萨M30626单片机的内部定时计数器,设计产生幅值为3 V,周期为10 ms,占空比为50%的PWM信号作为噪声激励信号加载到阀门定位器4~20 mA控制信号及阀门开度信号上。AD转换器参考电压为2.5 V。根据理论分析可知,要想提高2位分辨率,需要16倍于初始采样频率进行采样。4~20 mA采样信号滤波及过采样电路如图4所示,4~20 mA模拟输入信号经由MAX4163运算放大,同时单片机输出PWM信号作为噪声激励信号通过电阻R6加载到放大后的4~20 mA信号上进入M30626单片机的A/D采集引脚。
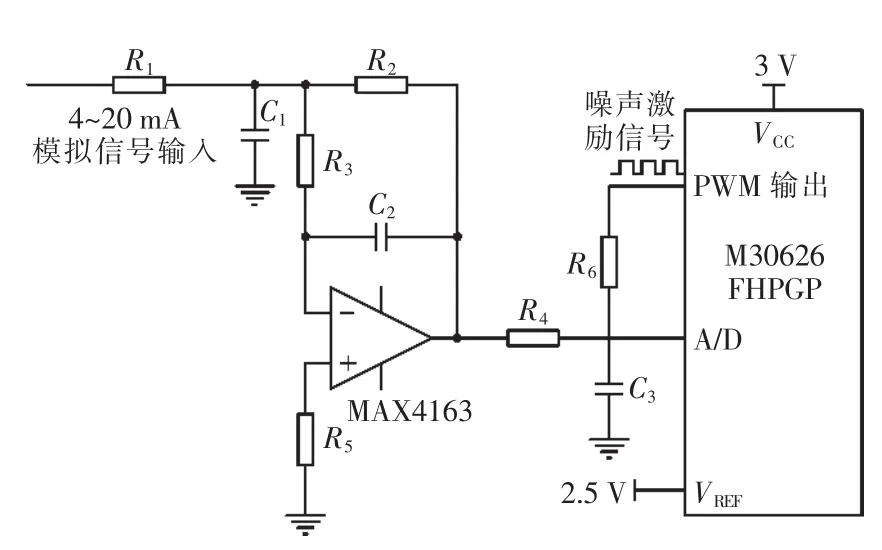
图4 4~20 mA信号过采样硬件实现方案Fig.4 Circuit schematic diagram of the 4~20 mA oversampling signal
图5为过采样程序流程图。在一个PWM信号周期内,单片机均匀采集16次4~20 mA信号,并将采集结果累加后右移2位得到所需ADC结果,将此结果经过单片机内部线性换算后得到输入电流值。
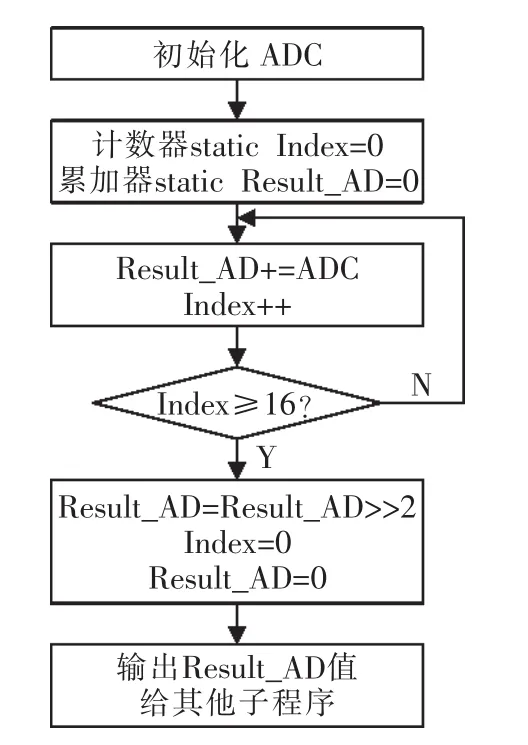
图5 过采样程序流程图Fig.5 Flow chart of oversampling program
由于智能阀门定位器输入信号为4~20 mA直流信号,因此为了更加直观地展现过采样技术对信号采集精度及分辨率的影响,测量了不同情况下智能阀门定位器的死区,即在各个测试点,单片机所能检测到并控制阀门动作的输入电流最小变化范围。实验结果如图6所示。
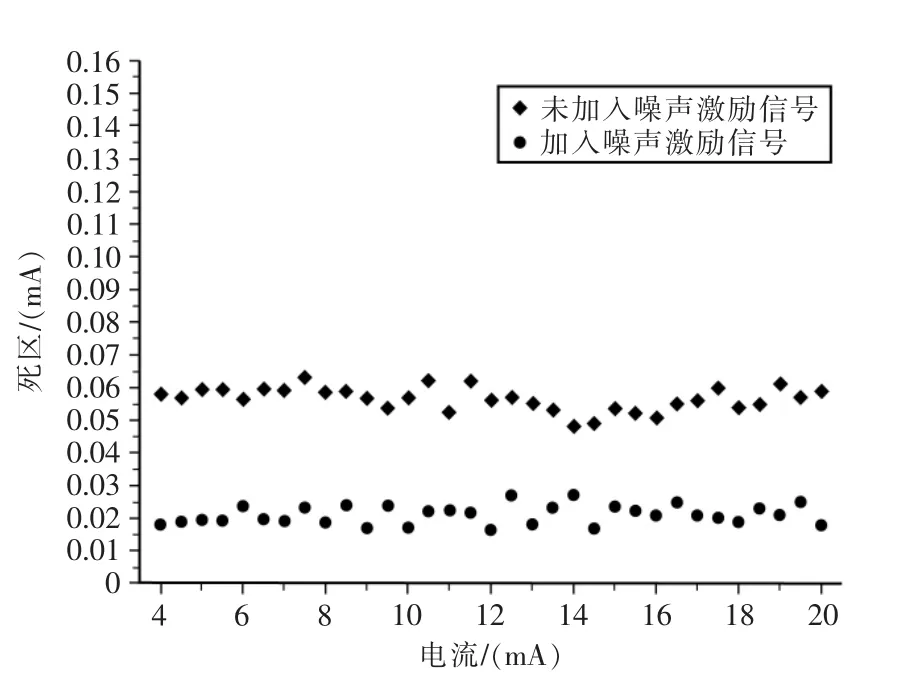
图6 不同测试点智能阀门定位器死区分布图Fig.6 Distribution of dead zoon at different testpoints in smart electrical valve positioner
从图6可以看出:在4~20 mA信号输入范围内,未加入噪声激励信号之前智能阀门定位器的死区值约为0.055 mA;加入方波信号作为噪声激励信号,采用过采样技术,智能阀门定位器的死区值减小为0.02 mA。从以上实验数据可以得出:在不采用昂贵片外AD转换器的条件下,采用过采样技术,加入噪声激励信号,提高了单片机信号采样的分辨率及精度。
4 结语
本文采用瑞萨M30626单片机,在其自带10位AD转换器基础上,利用过采样技术实现了12位分辨率,提高阀门定位器控制精度,并给出了软件及硬件实现方案。利用这种技术可避免采用昂贵的片外AD转换器,降低产品成本。
[1] 林慧.智能电气阀门定位器的研究开发[D].天津:天津大学,2003.
[2] 李刚,张丽君,林凌,等.利用过采样技术提高ADC测量微弱信号时的分辨率[J].纳米技术与精密工程,2009,7(1):71-75.
[3] 刘青兰,方志刚,邵志学.利用过采样技术提高ADC测量分辩率[J].现代电子技术,2007,30(12):74-76,79.
[4] 高光天.模数转换器应用技术[M].北京:科学出版社,2001:5-33.
[5]J C Candy,G C Temes.Oversampling Methods for A/D and D/A Conversion[J].IEEE Transactions on Circuits and Systems,1987(6):32-39.
[6] 李刚,张丽君,林凌,等.结合过采样技术和锯齿成形函数的微弱信号检测[J].电子学报,2008,36(4):756-759.
猜你喜欢
流程工业(2022年3期)2022-06-23 09:41:08
减速顶与调速技术(2021年1期)2021-08-14 01:59:38
煤气与热力(2021年3期)2021-06-09 06:16:18
科技创新导报(2021年33期)2021-04-17 08:38:01
数学物理学报(2019年3期)2019-07-23 01:15:40
家庭影院技术(2018年9期)2018-11-02 05:31:32
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
电气化铁道(2016年4期)2016-04-16 05:59:46
中学科技(2014年11期)2014-12-25 07:38:53