基于ADRC的起动机负载测试系统
2015-01-27 06:38:04周国栋张墩利
自动化与仪表 2015年1期
周国栋,张墩利
(1.湖南广播电视大学 机电工程系,长沙 410041;2.中南大学 机电工程学院,长沙 410083)
起动机是汽车起动瞬间带动发动机运转的一种直流电机,出厂时要对其进行负载性能测试,其测试过程是将电机转速和电流调整到设定值,然后判断输出力矩是否合格,负载测试的特点是短时间内电流要迅速上升至额定值(100 A左右)且不能超调过大,否则发热很大容易烧坏电机,因此在负载性能测试中要求过程尽量快(不超过2 s)且精确(恒流、恒速精度±1%),其控制的快速性、超调性矛盾十分突出。目前国内主要采用PID及其改进算法进行控制,实际应用表明其控制效果并不理想[1],原因之一是测试过程中的负载扰动、摩擦力扰动、纹波推力扰动和其他不确定扰动严重影响测试精度和测试速度;其二是PID算法很难实现电流和转速的双输入双输出的解耦控制。
自抗扰控制ADRC(active disturbance rejection control)是在传统PID控制算法上改进而来,融合了现代非线性控制、Bang-Bang控制、状态观测器技术,能根据被控对象的输入和输出量,观测出作用于被控对象的内部和外部的总扰动,通过动态扰动补偿技术,将被控系统改造为积分串联型线性控制系统,从而实现“自抗扰”,显著改善控制系统的性能[2-4]。自抗扰控制是近年来用于工业控制,尤其是电机控制中的一种新的高效率非线性控制算法[5]。其继承了PID控制器结构清晰、算法简单高效、无需被控系统精确数学模型等优点。文献[6]实现了多变量、强耦合的单元火电机组的自抗扰控制;文献[7]实现了开关磁阻电机的自抗扰调速控制。
本文在离散域设计负载测试系统的ADRC控制系统,利用其ESO的扰动检测能力实现了解耦控制。并在工控机系统中设计C++程序,完成了实验测试,测试精度和效率都有提高。
1 起动机负载测试模型分析和ADRC控制系统
1.1 负载测试原理及数学模型
负载性能测试原理如图1所示,对起动机采用2个回路进行控制,分别为电流回路和速度回路,由2个独立ADRC完成解耦控制。

图1 起动机负载测试控制原理图Fig.1 Diagram of starter load testing system
起动机电气和机械状态方程分别为[9]
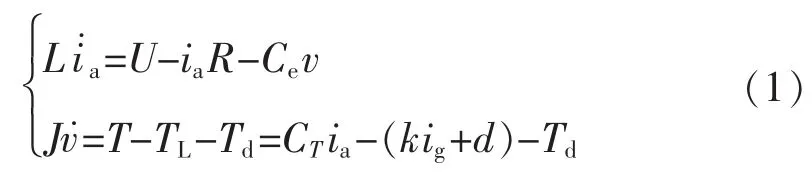
式中:U为起动机电枢电压;L为电枢电感;R为电枢内阻;Ce为电机电势系数;ia为电枢电流;v为电机转速;J为电机转动惯量;电机输出力矩T=CTia;CT为转矩系数;TL为负载转矩,即为磁粉制动器输出力矩;一般来说,磁粉制动器的输入ig与输出TL之间有比较好的线性关系,可通过实验数据对其关系进行线性回归,得到TL=kig+d,k和d为线性系数;Td为系统等效扰动转矩总和;U和ig为输入量;ia和v为输出量。
1.2 测试系统的ADRC控制原理
将式(1)进行变换,得到如下状态方程:

这样便得到ia和ig,U和v之间的关系式,为接下来的ADRC解耦控制提供依据。本控制系统采用双ADRC控制结构,为避免重复,以下论述都以电流控制回路为例,速度回路与之类似,不再赘述。
对ia进行分析,其表达式可以理解为

式中:f0为内外确定的“扰动”部分;fdist为未知的扰动部分;d(t)为扰动总和。理想状况下,电流回路的ADRC能由磁粉制动器的输入ig和起动机电流ia观测出扰动总和d(t),为补偿扰动,可以取控制量

代入式(3)中,可得:

至此,测试系统变为积分串联型结构,再采用非线性误差反馈控制,便能获得高性能的闭环特性。
2 ADRC控制器设计
ADRC包括3个部分:跟踪-微分器(TD)、扩张状态观测器(ESO)、非线性反馈控制律(NLSEF)。电流控制回路的ADRC结构如图2所示,TD用来安排给定量的过渡过程,以解决快速性和超调的矛盾;ESO用以跟踪反馈信号并估计出扰动总和;NLSEF将利用误差信号进行非线性组合计算以得出反馈控制量。

图2 电流回路ADRC控制器结构图Fig.2 Diagram of ADRC current regulator
电流回路的离散域ADRC控制算法为
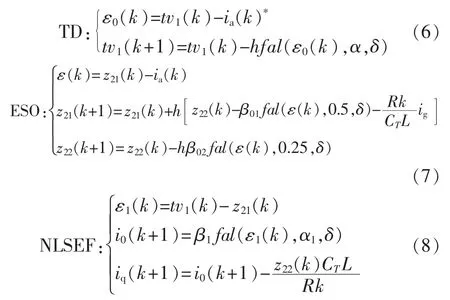
fal函数为最优综合控制函数,其表达式为
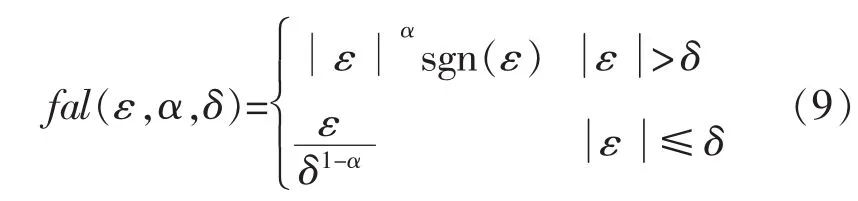
式(6)~(9)中:h为计算步长;α为非线性因子;β01和β02为输出误差校正系数;β1为误差增益;δ为滤波因子[10]。
3 实验结果分析
以起动机QDJ2528B为测试对象,根据上述计算公式和表1中起动机物理参数,并根据参数设置经验[11]设置和修正各模块的参数,如表2所示。
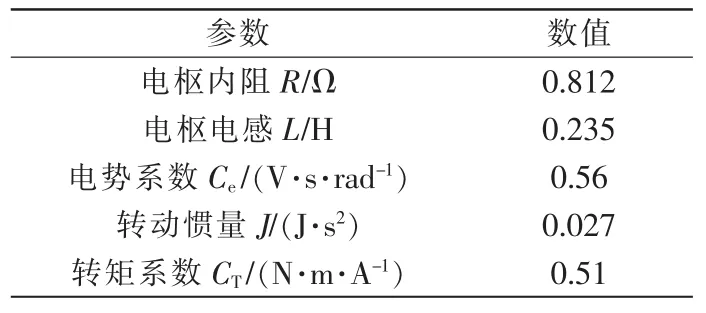
表1 起动机物理参数Tab.1 Parameters of starter
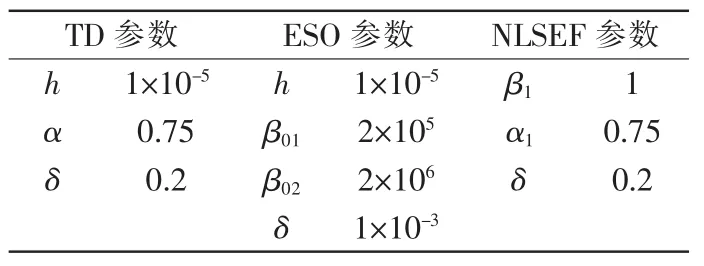
表2 ADRC系统参数Tab.2 Parameters of ADRC
系统实验平台以PC104规格的x86架构工业PC为核心,扩展PCI总线的研华多功能高速数据采集卡PCI1710HG,外围开关量动作采用PLC控制。操作系统为Windows7,控制软件采用VC++2005开发,数据采样周期为1 ms。
为了验证系统的性能,分别做了负载测试和负载干扰测试。
图3(a)、3(b)调节目标是转速3000 r/min、电流80 A情况下分别采用双ADRC调节器和双PID调节器所对应的转速、电流波形。
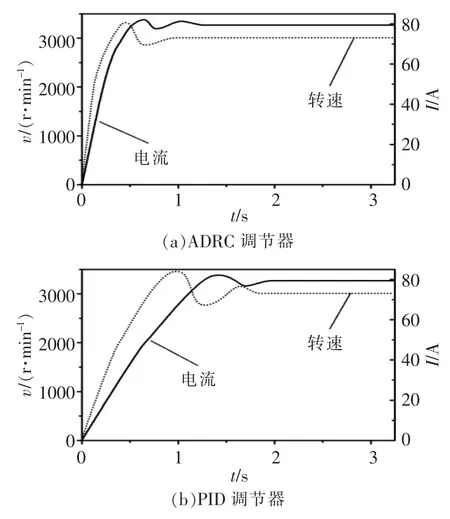
图3 转速、电流负载测试响应曲线Fig.3 Velocity and current response of load test
从图3看出,传统PID调节的电流、转速在1.8 s达到稳态,最大超调量为89A、3487r/min;ADRC调节器在1.5 s达到稳态,最大超调量为84 A、3210 r/min。
图4(a)、4(b)是在调节目标完成后,在2 s时刻突加持续时间为0.1 s的3 N·m的扰动力矩后,分别采用ADRC和PID控制得到的转速和电流曲线。
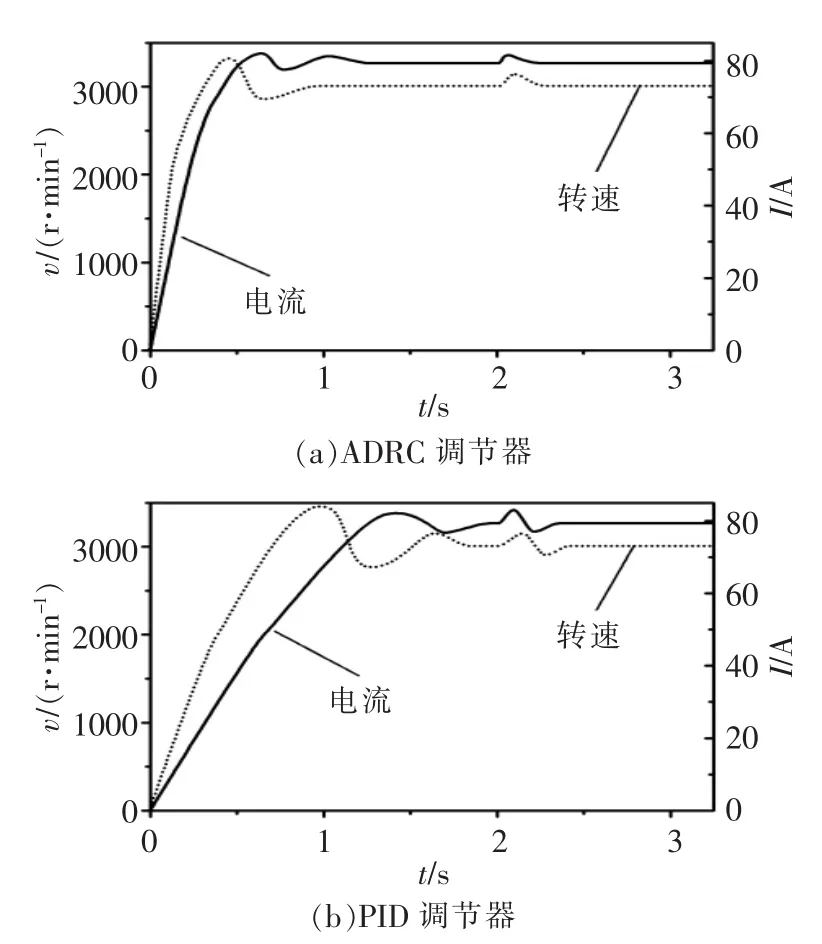
图4 转速、电流负载扰动测试响应曲线Fig.4 Velocity and current response of load test with disturbance
传统PID调节器再次稳定的调节时间为0.4 s,最大超调量为85 A、3294 r/min;ADRC的调节时间为0.3 s,最大超调量为82 A、3024 r/min。可以看出,当干扰较大时,PID控制不能达到恒流、恒速精度要求,而ADRC可以稳定在1%范围内。
从以上实验可以看出,ADRC调节器与PID控制相比,具有超调量小、过渡时间短、调节速度快等优点,能更好地保证负载试验测试过程能在更短的时间内完成,以更好地保护起动机、提高测试效率。
4 结语
本文将ADRC控制器应用于汽车起动机负载测试系统,采用速度和电流双ADRC调节器结构实现解耦控制,实验表明ADRC调节器的性能优于PID调节器,具有动态响应快、调速范围宽和抗扰动能力强等特点。
[1] 阳春华,桂卫华,王雅琳.起动机性能测试的智能PID控制[J].中南工业大学学报,1999,30(3):311-314.
[2] 韩京清.自抗扰控制技术[J].前沿科学,2007,1(1):24-30.
[3] 韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002,9(3):13-18.
[4] 韩京清.自抗扰控制技术-估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008.
[5] Su Y X,Zheng C H,Duan B Y.Automatic disturbances rejection controller for precise motion control of permanent magnet synchronous motors[J].IEEE Transactions on Industrial Electionics,2005,52(3):814-823.
[6] Khani F,Yazdizadeh A.Boiler-turbine unit controller design based on the extended state observer[C]//IEEE International Conference on Control and Automation,Christchurch,2009:2066-2071.
[7] Pan J F,Kwok S C,Cheung N C,et al.Auto disturbance rejection speed control of linear switched reluctance motor[C]//Industy Applications Conference Fourtieth IAS Annual Meeting,2005(4):2491-2497.
[8] 冯光,黄立培,朱东起.采用自抗扰控制器的高性能异步电机调速系统[J].中国电机工程学报,2001,21(10):55-58.
[9] 周儒勋,张泽龙,亓迎川.直流电机模型参数的直接辨识[J].计算机仿真,2006,23(6):113-115.
[10]朴军,韩京清.自抗扰控制器(ADRC)仿真软件[J].系统仿真学报,1999,11(5):383-387.
[11]凌玉华.铝电磁铸轧带坯晶粒度软测量及复合磁场智能控制研究[D].长沙:中南大学,2010.
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
数学物理学报(2019年4期)2019-10-10 02:38:56
汽车维护与修理(2018年9期)2018-10-31 02:34:28
中国科技博览(2017年13期)2017-06-05 20:06:05
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
电源技术(2015年11期)2015-08-22 08:50:38
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
汽车电器(2014年8期)2014-02-28 12:14:29