
五指仿人机器手的结构设计与实现
2015-01-23 01:08□田园
产业与科技论坛 2015年20期
□田 园
一、引言
随着机器人技术的飞速发展及其在各领域的广泛应用,国家在《国家中长期科学和技术发展规划纲要》和《国家高技术研究发展计划“十一五”发展纲要》中,把“服务机器人”研发作为重点项目。机器手是“机器人”的关键部位,在各种护理、排爆、抢险等机器人中,机器手是机器人完成任务必不可缺的一部分。本文针对多指灵巧手的结构进行了深入的分析,采用了微小型步进电机作为驱动装置,设计并开发出微小型关节减速器作为传动装置,采用中空式的铝合金关节壳体结构,实现了对微小型步进驱动电机和传动减速器的合理布局,为各关节之间的链接和各类传感器的安放提供了有效的空间,采用CATIA 软件建立仿人机器手的三维实体模型并进行装配。在结构设计、样机开发过程中,总结出一套仿人机器手的设计、加工和控制理论,为机器手的进一步优化奠定了基础。
二、五指仿人机器手的总体结构设计
在对五指仿人机器手的结构进行优化设计时,我们对手指数目、手指的材料、手指的结构形式、各手指之间的相对位置及姿态、手指关节运动副的形式、各关节运动的驱动方式及传动方式、各关节的长度及回转关节的回转角度范围、手掌的结构等问题进行优化分析和设计。根据以上主要设计内容,具体设计方案路线如下:
(一)五指仿人机器手材料的选择。仿人机器手各手指要求实现2 个俯仰自由度,结构比较复杂,对材料刚度与强度要求较高。在综合考虑仿人机器人结构和传动方式的基础上,从五指仿人机器手手指受力情况分析,它们在工作中直接承受静、动载荷,并且指尖所受载荷时转矩较大,因此五指仿人机器手手指的材料选用了LY12 硬质铝合金,这样既保证了手指关节壳体的刚度和强度,又减轻了手的整体重量。在齿轮材料的选择上,通过校核计算,最终选择铜合金材为微小型手指齿轮减速器材料,使其达到较高传动精度。
(二)五指仿人机器手手指结构设计。通过对人手的各关节长度尺寸的研究,确定该仿人机器手具有11 自由度,整个机器手由5 个手指和一个掌面组成,每个手指有2 个旋转关节,新型五指仿人机器手可以模仿人手的功能进行简单操作,完成手指弯曲运动,并通过手指的合作与协调来实现一定的运动和简单的抓取。新型仿人机器手由大拇指、食指、中指、无名指、小拇指、手掌壳体组成;食指、中指、无名指、小拇指结构相同且具有两个摆动副,各由一台伺服电动机驱动,大拇指具有三个摆动副各由一台伺服电动机驱动。
五指仿人机器手的结构尺寸可以参考人类手指的长度比例,并加以适当的放大或缩小,或根据所设计的机器手尺寸的使用场合来进行适当的调整。具体仿人化手掌结构尺寸如图1 所示。
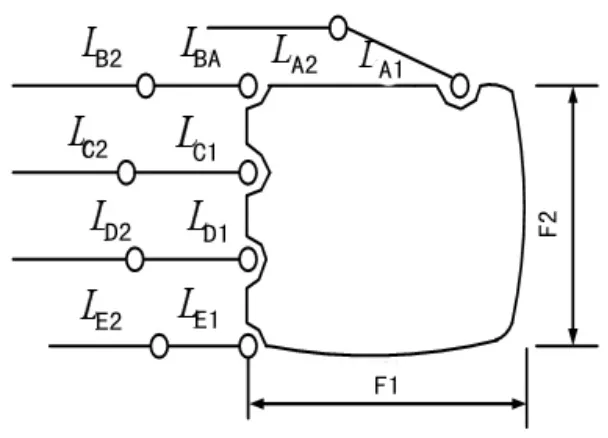
图1 仿人化手掌结构尺寸
三、五指仿人机器手传动系统和电机的选择
五指仿人机器手的机械结构是研究仿人机器手控制方面的基础。本仿人化机器手主要由微小型步进电机、微小型关节减速器和外形壳体3 大部分组成,实现了仿人化的手形结构。
(一)手指关节电机的选择。步进电机的旋转角度正比于其脉冲数,在停转时具有最大的转矩,并且具有良好的启停和反转响应。考虑五指仿人机器手的手指尺寸,以及其对位置精度和负载力矩要求较高,其手指各关节均选用步进电动机(pm10s020)驱动。电机尺寸参数与驱动参数如图2 和图3 所示。

图2 电机尺寸参数图

图3 电机驱动参数图
(二)手指关节传动结构设计。五指仿人机器手的传动系统是把步进电机产生的运动和力准确地传递到手指关节,带动关节做俯仰运动。五指仿人机器手的手指关节采用自主设计的微小型关节式齿轮减速器来传递步进电机产生的运动和力,不仅减小了手指的尺寸和质量,而且提高了抓取能力和抓取过程中的平稳性。
齿轮减速器由固定板、板间支撑柱、输出轴、传动轴、齿轮和电机组成。电机为一台小型步进电动机。步进电动机固定在中层固定板上,齿轮固定在传动轴上(齿轮4 除外),传动轴与固定板间为滑动摩擦。电机提供的动力经过五级齿轮减速最后由输出轴输出。减速达到369:1。手指关节模型图如图4 所示。减速器由上、中、下固定板7.12、7.13、7.14,齿轮7.2、7.3、7.5、7.6、7.10、7.15,轴7.1、7.4、7.8、7.11组成,齿轮7.10 安装在电动机7.9 上,齿轮7.15 安装在轴7.11 上,齿轮7.6 安装在轴7.8 上,齿轮7.3 安装在轴7.4 上,齿轮7.5 空套在轴7.1 上,齿轮7.2 安装在轴7.1 上;电机工作带动齿轮7.15→7.16→7.5→7.3→7.2,齿轮7.2 带动轴7.1 输出。
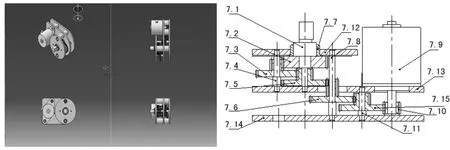
图4 手指关节模型图
(三)机器手手指外形壳体的设计。机器手外形壳体结构的设计不仅决定了其拟人化程度,同时也决定了各关节的连接形式和机器手的灵巧性。机器手手指壳体采用铣削成型铝合金薄壳,能够实现减速器和驱动电机的合理布局,为各类传感器提供了有效的安放空间。如图5 所示为微小型减速器、步进电机和手指壳体构成装配图。第一电动机8.3安装在第一减速器8.2 上,第一减速器8.2 固定在中指节8.4 上,通过第一减速器8.2 的输出轴带动指头运动;第二电动机8.6 安装在第二减速器8.5 上,第二减速器8.5 固定在基指节8.7 上,通过第二减速器8.5 的输出轴带动中指节运动。(食指、中指、无名指、小拇指结构相同),最终手指通过后端螺纹孔连接到手掌上。机器手抓取物体达到抓握稳定后,手指依靠步进电机的自锁能力保持对物体的抓取力。
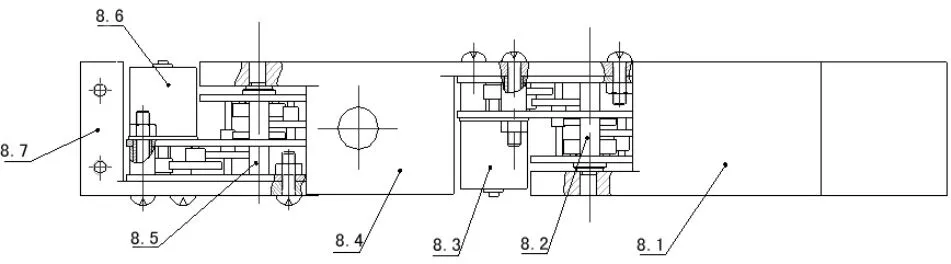
图5 仿人机器手手指装配图
为了保证加工与安装方便仿人机器手与腕部采用法兰结构连接,把手掌与腕关节分开设计,制成独立的法兰腕部结构,既满足了设计的要求,减轻了手部整体质量,也使其与手臂易于连接。
四、试验与验证
课题基于三维造型设计软件CATIA 建立了仿人机器手的参数化模型,完成对机械系统各零部件和装配体的建模,并进行了干涉和碰撞检查。然后将装配体模型导入Adams软件进行后续的约束和驱动添加,建立了手指、手掌虚拟样机仿真模型,通过对手指各关节运动特性的仿真分析,最终通过模拟实验验证该结构的性能,使其获得最优化结构。仿真结果表明五指仿人机器手各项性能指标符合设计要求,且系统反应灵敏稳定、可靠,准备投产。
[1]郭语,孙志峻,黄卫清.超声电机驱动五指灵巧手的设计与仿真[J].机械科学与技术,2007,5(10):10 ~36
[2]刘伊威,金明河.DLR/HIT 仿人机器人灵巧手的设计[J].机械制造,2006,8(11):42 ~45
[3]何永强,朱广超,张启先.多指灵巧手双闭环模糊控制[J].高技术通讯,2004,4(7):59 ~64
猜你喜欢
内燃机工程(2021年6期)2021-12-10
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
铁道通信信号(2019年10期)2019-11-25
铁道通信信号(2019年1期)2019-03-21
卷宗(2019年34期)2019-02-18
军事文摘(2018年24期)2018-12-26
制造技术与机床(2017年3期)2017-06-23
现代商贸工业(2016年35期)2016-04-09
现代制造技术与装备(2016年12期)2016-04-06
