一种折臂式起重机吊钩测量系统
2015-01-23 02:52□戴炼
产业与科技论坛 2015年23期
□戴 炼
海工折臂式起重机是海工工程机械重要的起重机械,是人类探索海洋资源的重要工具。随着我国对海洋的开发力度逐渐加大,海洋工程机械也变得炙手可热,但我国深海工程机械和国际先进水平的生产工艺还有一定的差距。海工折臂吊钩高度计算是实现海工吊波浪补偿的基础,是实时监控海工起重机作业的重要参数;海工折臂式起重机臂长的伸展半径关乎起重机最大负载重量的直接参数[1]。如何准确地检测计算折臂式起重机吊钩高度以及起重机臂长伸出半径就显得尤为重要。本文根据折臂式起重机结构特点,仿真折臂式起重机运动轨迹,通过绝对值编码器检测起重机臂伸张角度,建立吊钩运动轨迹模型,从而实现折臂式起重机吊钩端高度以及起重机臂顶点实时测量。为了实现折臂式起重机吊钩高度测量及起重机臂端测量,折臂式起重机的主臂和副臂上采用单圈绝对值编码器检测主臂及副臂伸张角度,从而得出起重机臂伸出半径;使用多圈编码器测量主绞车编码器伸缩钢丝绳吊钩的位置[2],通过PLC 的处理器计算吊钩位置与臂端顶点垂直方向的位移偏差量之和。
一、折臂式起重机吊钩测量系统的构成
从折臂式起重机的结构上来看,主要划分为基座、塔身、绞车、主臂以及副臂,电气检测元件也主要根据这些机构的特点进行安装,图1 是电气检测元件及PLC 安装分布图。图1 种主要电气元件的功能如下:绞车编码器——检测绞车卷扬伸缩钢丝的长度。主臂编码器——检测主臂仰俯的角度。副臂编码器——检测副臂仰俯的角度。PLC 编程控制器——收集各传感装置信号,并根据程序内折臂式起重机模型处理各传感器数据,从而计算出吊钩的位置值。中央监控显示单元——接收PLC 处理数据,并将其显示在界面上便于驾驶人员观察。

图1 折臂式起重机高度及臂长半径检测系统元件示意图
二、折臂式起重机的数学模型
如图2 所示,以O 点(基座原点)水平面作为0 米面,P 点为主臂与塔身衔接点,α 为主臂与水平方向的夹角。β 为主臂与副臂之间的夹角,主臂长度为L1,副臂长度为L2,主臂顶端M到绞车P 点的垂直距离为S1,主臂顶端M 到副臂顶点N 的垂直距离为S2,h1 为基座原点O 点到P 点水平面的距离,h1 为基座高度与塔身高度之和。
在此数学模型中,N 点到0 米水平线的距离H 即为折臂式起重机副臂顶端的高度。
则—(1)
其中:
—(2)
在式(2)中,0≤α <90。
—(3)
式(3)0 <<180°。
由式(2)和(3)中可以看出在此模型中,只需求得角度α 和角度β,就可以得出此模型中折臂式起重机副臂顶点N 距离0米面的高度。在折臂式起重机初始状态下,即主臂位于水平方向,主臂与水平方向的夹角α 等于0°,主副臂处于合拢状态,此时主副臂之间的夹角β 为最小值βmin,由公式(1),(2),(3)可求得折臂式起重机副臂顶端的初始高度值为:
—(4)
折臂式起重机副臂顶端在运动过程中的差值:
—(5)
同样在此模型中,认为敷设在主臂上及副臂上的钢丝绳长度不会改变,绞车钢丝绳伸出的长度为Lwinch,在折臂式起重机初始状态下,标定绞车钢丝绳伸出长度到达0 米基准线的值为0,吊钩从0 米基准面上升时编码器值增加,Lwinch >0;吊钩从0 米基准面下降时,Lwinch <0。如图3 所示。

图2 折臂式起重机副臂顶端高度分析

图3 折臂式起重机初始状态下绞车钢丝绳长度标定
折臂式起重机吊钩高度Hhook 等于绞车钢丝绳长度Lwinch 与折臂起重机副臂顶端高度差值H△标量之和,即:
—(6)
由此模型可求得折臂式起重机吊钩实时高度值Hhook。
由图2 同样可以计算出臂长伸出半径R(折臂式起重顶点N 到起重机塔身中心线OP 的距离)为:
—(7)
其中式(7)中,0≤α <90,0 <<180°。
三、控制器程序设计
折臂式起重机整体的电气控制系统的设计,折臂式起重机电气系统内部所使用的传感器类型包括:温度传感器、压力传感器、离散量传感器等,且带有分布式远程I/0 站点。根据以上特征折臂式起重控制器选用西门子STEP7 -300 系列,含有标准Profibus-DP 协议的PLC。主臂及副臂测量角度装置均选用单圈绝对值编码器,带有Profibus -DP 接口。测量绞车钢丝绳伸缩长度的装置选用多圈编码器,带有Profibus-DP 接口。
如图4 折臂式起重机高度计算程序流程图所示,PLC 启动后,绞车及主副臂编码器开始检测,由编码器脉冲分别得到绞车钢丝绳伸缩长度Lwinch,及主副臂仰俯角度α 和β,通过主副臂顶点高度位移差计算出副臂顶端距离0 米面的高度H,并计算出当前副臂顶端高度与副臂顶端初始高度的偏差值H△,此时吊钩的高度Hhook 等于绞车钢丝绳伸缩长度Lwinch 与副臂顶端高度偏差值H△之和。注:在此计算过程中,绞车钢丝绳长度所选的标定面与副臂顶端的0 米面高度一致;且绞车钢丝绳长度的标量方向与副臂顶端的高度偏差值一致。
由于现场使用环境恶劣、电气管线布局不合理、通讯电缆使用老化等问题,都会造成通讯网络干扰的现象,这些因素将严重影响折臂式起重机上的高度实时更新,以及波浪补偿位移的补偿精度,甚至可能引起起重机严重超载事故。因此有必要在程序中做一个中断程序保证起重机通讯的连续性。在此我们调用西门子SFC51 模块诊断各子站的通讯状态[3];对于子站和机架组态的编程,在设计编程中可调用OB86 或者调用FB125 块,此处编程只作参考。
首先,在S7 -300 的主程序OB1 中调用系统功能块SFC51,并插入数据储存区DP51、DP61,SFC51 提供了丰富的功能,可以用来读取CPU 的指示灯状态,Profibus DP 从站,CPU 硬件的序列号、存储卡序列号等等功能,此功能块设计旨在读取子站的状态,监控PLC 读取数据是否正常,选择使能信号激活REQ,并用十六进制写入通讯协议代码,在DP61 数据储存块中,最终反映了各子站的连接状态,读取DP61 的状态可判断当前子站的通断情况。程序的调用功能见图4。
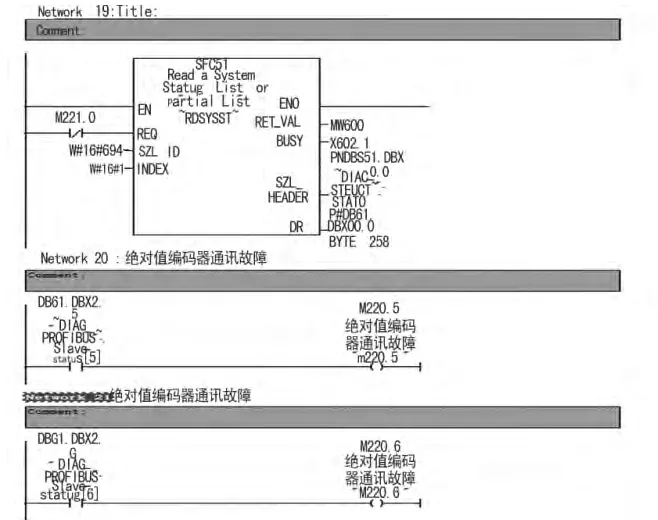
图4 Profibus 子站诊断
四、应用效果
该测量系统的特点:一是该系统仿真折臂式起重机结构特点,所有参数基本成线性特征,传感器采集数据成连续性,较激光测距、雷达测距等传感器适用范围更为广泛,测试数据更接近真实性。二是该系统主副臂角度测量编码器采用了冗余设计,保证角度测量准确性,防止单个编码器采集数据失真而造成的测量不准确。目前,此套测量系统在折臂式起重机上应用良好,部分产品已交付客户使用。
五、结语
由此系统的结构特点不难看出,无论是海工单臂式起重机,还是折臂式起重机,该系统都能很好地对吊钩进行测量,并可以在门座式起重机进行推广,提高驾驶人员对吊钩的监控,保证操作安全性,提高起重机械作业效率。
[1]Jörg Neupert,Tobias Mahl,Bertrand Haessig,Oliver Sawodny,Klaus Schneider. A Heave Compensation Approach for Offshore Cranes[J].American Control Conference Westin Seattle Hotel,Seattle,Washington,USA,2008,6(11 ~13):538
[2]Rainbow - cargotec. Technical Description of control system of offshore[Z].2014,7
[3]廖常初.西门子工业通信网络组态编程与故障诊断[M].北京:机械工业出版社,2009:235 ~236
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
机械工程师(2022年7期)2022-07-15
山西冶金(2020年3期)2020-07-15
制造技术与机床(2017年7期)2018-01-19
西安工程大学学报(2016年6期)2017-01-15
探测与控制学报(2015年4期)2015-12-15
科技与企业(2015年18期)2015-10-21
同煤科技(2015年4期)2015-08-21
铸造设备与工艺(2015年3期)2015-07-11
中国质量监管(2015年12期)2015-03-24