基于滑模控制的虚拟NOx传感器建模与仿真
2015-01-22 05:27:06冯雪丽
机电工程 2015年5期
冯雪丽
(杭州科技职业技术学院,浙江杭州311402)
0 引言
国内外的学者一直把NOx 传感器作为研究的热点。研发汽车废气用NOx 传感器的目的是为了更加精确地解决NOx 的排放的问题,并快速地测量,以满足空气质量检测和环保要求的氮氧化物含量。
作为汽车引擎控制传感器,必须工作在被引擎控制的工作环境中,这样的传感器必须具备下列性质:①因发动机工作时排放的尾气温度很高,传感器在工作时要能够耐高温;②传感器工作在温度-20 ℃~900 ℃的范围内,要求其材料要耐得住温度经常突变的影响;③能够对废气中的NOx 分压变化做出非常迅速的回应和恢复,以及可重复性、稳定性更好[1]。
这种苛刻的环境决定了NOx 传感器的制造技术和工艺要求非常高,目前国内所用的NOx 传感器几乎都是从西方国家进口,比如博世、通用等,而且,由于价格高昂,导致NOx 传感器在汽车制造上很难成为标准配置。因此,对虚拟NOx 传感器进行研究,避开硬件上的障碍,从软件方面着手,不失为一种创新途径。
变结构控制系统(VSCS)的概念自在文献[2-3]中首次提出,此后一步步发展成了一个新的综合的控制系统方法。滑模变结构控制理论是变结构控制理论的主要理论体系。它已形成了一套独立的集成系统理论,包括滑模设计、多种综合控制方法、系统稳定性分析和系统的到达条件等。目前工程实践对控制理论提出了更高的要求。控制对象越来越复杂,非线性控制系统越来越严重。非线性系统的控制吸引了众多学者的关注;变结构控制理论,正是为了解决非线性系统控制问题的好方法。因此,滑模变结构控制理论研究近年来备受学者青睐。
本研究将基于滑模控制理论对NOx 进行虚拟设计,采用Matlab 的Simulink 模块对虚拟NOx 传感器进行建模并进行仿真。
1 滑模控制理论研究
1.1 滑膜控制基本原理
滑模变结构控制是不同于其他控制的一种非线性控制,非线性的实质是断续的控制,即控制是不连续的。这种控制策略的特别之处是系统的“结构”是不固定的,但在动态过程(如偏差及其各阶导数等)有意地改变,按照预定的轨迹强制系统在“滑模”状态运动。由于滑模能够设计,且对象参数及扰动不会影响滑模,变结构控制具有响应速度快、不受参数变化和扰动,不用系统在线辨识,物理实现简单等优点;这种方法的不足是,当状态轨迹到达滑模面后会产生振动[4]。因它很难准确地沿着滑模面向着平衡点滑动,而是在滑膜面两侧来回穿越。
所谓变结构系统就是指把系统的运动引导到一个选定的超面上。该超面由设计者进行选定,称为滑动面或开关面。超平面上的运动是渐近稳定的。变结构控制能够在一定特性下强制系统作小幅度、高频率的上、下运动。即滑动模式或滑动运动。变结构控制系统的设计主要是切换函数s 的设计和变结构控制规律的确定。
设有一控制系统:

式中:x∈Rn,u∈Rm,t∈R。
确定切换函数:

式中:C=[c1,c2,…,cn],s∈Rm。
设计控制函数:

满足下面的条件:
(1)在切换面s=0 上,存在滑动模态区,且滑动运动具有良好的品质;
(2)滑动模态区有足够大的范围使相平面上(或相空间)任意初始状态都能以较快速度到达滑模;
(3)在滑模上渐近稳定,并具有良好的品质性能[5]。
滑模变结构控制系统的运动是由两部分组成的:一部分是系统在连续控制u+(s >0 时)或u-(s <0时)作用下的正常运动,即系统由初始状态到达切换面(或线)前的运动状态;另一部分是系统在滑动模态面(或线)s 上的滑模运动段。在正常运动段,由到达条件或趋近律来保证系统对摄动及扰动的自适应性;在滑模段系统能够对参数摄动及扰动完全自适应。
滑模运动包括趋近运动和滑模运动两个过程。采用趋近律的方法能够提高趋近运动的动态品质。
1.2 相关的理论研究
1.2.1 滑模变结构控制的抖振及影响因素
从理论的角度来看,从某种意义上说,滑模运动不受控制对象的参数变化及系统的外干扰的影响,滑动模态可以按照需要进行设计,因此滑模变结构控制系统的鲁棒性要比一般常规的连续系统强。然而,没有连续的开关特性滑模变结构控制会导致抖振。事实上,抖振的存在使得变结构控制系统具有抗摄动和抗扰动的能力,因此抖振不能完全消除,只能一定程度上把它减弱到一定范围内。抖振问题目前是变结构控制运用到实际系统中的突出障碍。
影响抖振的主要因素有:
(1)时间延迟开关;
(2)空间延迟开关;
(3)系统惯性的影响;
(4)离散系统自身造成的抖振:
在实际的工程系统中,因为不可避免地会受到时间延迟开关、空间延迟开关、系统惯性、系统延迟及测量误差等因素的影响,使得在滑动模态下,变结构控制会伴随着高频振动,此时,控制的精度会受到振动的影响、能量的消耗也会增加,而且极易激发系统中的高频未建模动态,系统的性能易被破坏,甚至导致系统出现振荡或不稳定,损伤到控制器单元。因此,研究控制信号抖振消除成为变结构控制研究的首要工作[4]。
1.2.2 消除滑膜变结构控制抖振的方法
在研究的过程中,国内外许多学者从不同的角度提出了解决滑模控制抗抖振问题方法,目前主要有以下几种:
(1)滤波方法;
(2)消除干扰和不确定性的方法;
(3)遗传算法优化方法;
(4)降低切换增益方法;
(5)扇形区域法;
(6)连续函数近似法;
(7)边界层的设计。
2 汽车NOx 的影响因素及检测原理
车用发动机排气中的氮氧化物NOX包含NO、NO2和N2O,其中大部分是NO,它们是N2在燃烧高温富氧下的产物。
影响NOx 生成的因素很多,如空燃比、点火提前角、运转状态、发动机结构参数、汽油品质等。对于发动机结构已定,汽油品质已定,其中运转状态是一个综合影响因素,当运转状态改变,其他影响因素也会发生相应的变化,故下文主要分析运转状态对NOx 排放的影响。
2.1 稳定运转状态
2.2.1 转速n 的影响
使用稀混合气时,在点火提前角一定,随着n 的提高,火焰传播速度也有提高,部分燃料在膨胀冲程压力和温度较低的情况下燃烧,NOx 生成量减小。
使用浓混合气时,火焰传播速度随转速的提高而提高,散热损失减少,气体温度升高,NOx 生成增加。具体影响如图1所示。
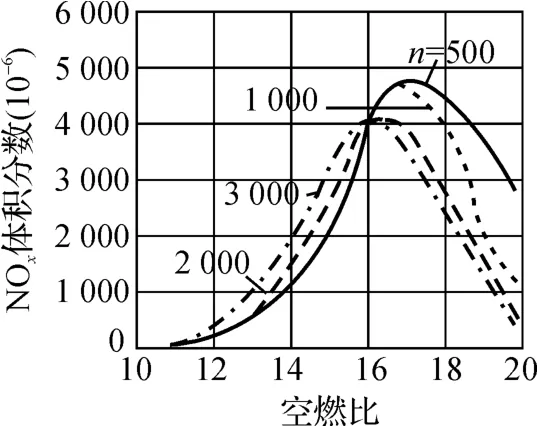
图1 n 的变化对NOx 排放的影响
2.2.2 负荷的影响
负荷增加,进气量就增加,降低了残余废气的稀释作用,火焰传播速度得到了提高,缸内温度提高,NOx排放增加。这一点在混合气较稀时更为明显。
混合气过浓时,由于氧气不足,负荷对NOx 排放影响不大。具体影响如图2所示。
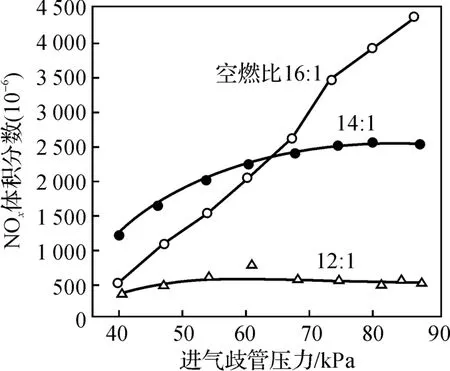
图2 负荷变化对NOx 排放的影响
2.2 非稳定运转状态
非稳定运转状态主要包括冷起动及暖机过程和加、减速。
低温起动时,NOx 排放很低。暖机过程中,NOx 排放逐渐增大。加速时要求发动机输出较大功率,需提高燃烧温度,NOx 排放增加。突然减速,节气门急速关闭,吸入过量燃料,进气量也减少,混合气浓,同时缸内压力降低,燃烧温度下降,NOx 减少。
2.3 汽车NOx 的检测原理
由以上分析可知,汽车NOx 的生成浓度与发动机的转速n 和负荷的变化及几种特殊工况成一定的非线性关系,滑模变结构控制在处理非线性问题上适用性很好。故本研究利用滑膜变结构控制理论来处理这种变化关系,从而达到检测汽车尾气中NOx的含量的目的。
3 基于滑模控制的虚拟NOx 传感器设计
该设计的虚拟NOx 传感器需要确定一个理想值CNOx_d,虚拟NOx 传感器,以转速和负荷为输入变量,通过查询NOx 浓度MAP 图获得该时刻的NOx 浓度值,把这个值当做理想值。所以,它是基于转速和转矩的函数:

显示值则是表示实际的值CNOx,实际NOx 浓度值作为输出信号来考虑,它同样是关于转速和转矩的函数:

3.1 滑模面设计
滑模面的选择是滑模控制设计的首要问题,滑模运动的稳定性与动态品质随滑膜面的确定而决定。1977年Utkin 提出了线性滑模面,其表达式有两种表示方式:一种是把状态变量或误差项的累加和作为其表达式,另一种是把状态变量或误差项的微分累加和作为其表达式。滑模面的线性结构可以使线性系统控制性能的设计要求得到充分满足,使得在滑模时可以很简洁、方便地分析系统的稳定性,也便于进行系统的参数设计,所以现在人们仍基于线性滑模面进行不断的研究。但它的应用限制在于,跟踪系统的状态误差在有限时间内不收敛到零[7]。
抗扰动性存在缺陷,难以测量存在的微分信号以及某些信号导数无意义,这些都是线性滑膜面的不足之处,针对这种情况,为解决稳态误差问题,Chem 在1991年首次引入了积分项用在滑模面的设计中,积分项使控制器具有消除诸多不确定项带来的静差的能力,如系统未建模误差等。快速性,是滑模变结构控制面临的又一问题,,线性滑模面不能满足实际的控制系统的要求,即在有限时间内状态能够达到平衡。1989年,终端吸引因子(Terminal Attract Factor)这一概念由Zak 首先提出。在此基础上,1994年Man 等人开发出终端滑模控制方法,提出终端滑模控制理论。终端滑模控制的基本理念是引入非线性项到滑模面中,使用非线性的超平面作为滑模面,它允许在滑动模式的系统状态达到平衡点在有限的时间内,终端滑模动态响应速度快,可以收敛到稳定状态在有限时间内,跟踪精度高。
对于NOx 传感器而言,由于它所处的环境是瞬态变化的,工况复杂,虚拟NOx 传感器的设计问题也是一个非线性问题[8]。
该虚拟NOx 传感器的设计,参考文献[9],控制对象设计为:

式中:f(CNOx,n,Tr),b—已知,且b >0。
滑模函数设计为:

式中:c >0,满足Hurwitz 条件。
误差及其倒数为:


则:趋近律则采用指数趋近律,有:

由以上两式得:
3.2 控制器设计
设计滑模控制率为:

结合式(17)和式(14),有:

满足可达性条件。
4 虚拟NOx 传感器的建模与仿真
4.1 模型建立
在建模和仿真的时候,转速信号和转矩信号都可以用关于时间的函数来表示,所以,上述所有的关于转速和转矩的函数可以表示成关于时间的函数,即被控对象可表示为:

根据以上说明以及仿真需要,不妨设,

理想信号:

初始状态为[-0.15-0.15]。
搭建的仿真模型如图3所示。
4.2 仿真结果与分析
虚拟NOx 传感器的仿真结果如图4所示。
从图4 看,刚开始的一小段时间里,实际值和理想值小幅的偏差,这是因为初始状态和理想情况有偏差造成的。之后,实际值迅速逼近理想值,且快速的和理想值保持高度吻合,偏差值几乎趋近于0。该仿真结果说明,该虚拟NOx 传感器在理论上具有很高的可行性。
5 结束语
虚拟NOx 传感器的工作环境是一个非线性问题,滑模变结构控制在处理非线性问题上适用性很好。基于这一思想,在理论上用滑模控制来研究虚拟NOx 传感器是可行的。

图3 虚拟NOx 传感器的仿真模型

图4 虚拟NOx 传感器的仿真结果
本研究采用Matlab 的Simulink 模块对虚拟NOx传感器进行建模,直观易懂,在仿真过程中错误的检测相对容易。通过对仿真结果进行分析,分析结果证实了该虚拟NOx 传感器在理论上具有很高的可行性,说明基于滑模控制所设计的这种虚拟NOx 传感器是一个值得进一步研究的问题。
[1]赵海燕,王 岭,陈嘉庚,等.汽车尾气用NO_x 传感器[J].传感器与微系统.2007,26(1):8-10,14.
[2]EMELYANOV S V.Control of first order delay systems by means of anastatic controller and nonlinear correction[J].Automation and Remote Control,1959,20(8):983-991.
[3]EMELYANOV SV.Design Principles for Variable Structure Control Systems[C]Proceedings of the 3rdIFAC Congress.London,UK:EI service Press,1966:40C.1-40C.6.
[4]刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用.2007,24(3),407-408.
[5]柳应全,卢琴芬,叶云岳.带积分补偿器的永磁直线同步电机滑膜控制研究[J].机电工程.2013,30(6),717-720.
[6]张 翔,王德石,李景熹.滑模控制器趋近律仿真研究[J].微机软件.2008,2(1),80-81.
[7]杨 洁,王庆林,李 原.滑模变结构控制研究综述[C].Hefei:Proceedings of the 31st Chinese Control Conference,2012:49-53.
[8]吴旭东,张 慧.基于激光位移传感器的Breaker 电池保护连接片原度测量系统[J].轻工机械,2013,31(6):90-93.
[9]宋黎明,杨前明,谢计业,等.电感式位移传感器输出特性仿真分析[J].机电工程,2012,29(7),795-802.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17 06:26:42
建材发展导向(2021年14期)2021-08-23 00:57:20
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
制造技术与机床(2018年11期)2018-11-23 01:08:02
意林(绘英语)(2018年1期)2018-04-28 01:21:42
中国组织化学与细胞化学杂志(2016年3期)2016-02-27 11:15:41
城市轨道交通研究(2015年11期)2015-02-27 11:02:50
雷达学报(2014年4期)2014-04-23 07:43:07