惠斯顿杠杆机构在钢管行业中的应用
2015-01-22 06:06吴鹏飞李敬波窦茂科
焊管 2015年7期
吴鹏飞,李敬波,窦茂科
(宝鸡石油钢管有限责任公司 ,陕西 宝鸡 721008)
钢管横移装置是在惠斯顿杠杆基础上设计的,由多列并行机构所组成,它的作用是将管坯快速横移至输送辊道或将输送辊道上的管坯快速移送至台架,具有移送效率高、无冲击、低噪声等优点。在转动过程中,其上的托架开口始终向上,保持平动,这样就避免了用翻料器翻钢造成的管坯表面划伤,保证钢管的表面质量。而旋转热锯是在惠斯顿杠杆基础上设计的周转轮系,是将由电机驱动的锯片装在旋臂上,作与管坯运动速度相等的圆周运动。锯片公转的绝对角速度为零,合成运动为平动,与往复式热锯相比,具有高效、快速、稳定等优点。因此,这种机构在钢管生产线上的得到了大力推广和应用。
1 在钢管横移装置中的应用
1.1 冷床下料移送装置
宝鸡石油钢管公司专用管公司采用的冷床下料移送装置布置于冷床台架和输送辊道之间,主要由电子控制部分、传动部分、联轴器、传动轴和回转臂等组成。回转臂固定在传动轴上,由变频电机经减速机驱动传动轴和回转臂转动。电子凸轮控制器根据设备使用的工况要求,实现对转臂速度的变频控制。可实现平稳接钢、快速移钢、平稳放钢和快速返回等循环过程。其平面布置图如图1所示。此装置托架是以平动方式运行的一种机构。它主要由托架、链传动机构、转臂、调节装置和配重共同构成,其结构简图如图2所示。

图1 冷床下料移送装置平面布置图

图2 冷床下料移送装置结构简图
托架用来装载钢管,它和钢管一起作平动。转臂随传动轴转动,向托架传递转矩,并装有链传动机构。链传动机构可以保证托架和钢管保持平动而不随转臂转动,它由活动链轮,固定链轮,张紧装置组成。调节装置与固定链轮铰接,作用主要是微调托架,保证托架垂直向上避免倾斜。配重可以使空载的转臂保持平衡,并且在负载时抵消部分转矩。
转臂转动时,钢管被托架平稳地托起并水平移动,固定链轮空套在传动轴上,与调节装置铰接固定,并与活动链轮的相对传动比i=1,使得活动链轮的绝对角速度为零,这样就保证了在转臂转动过程中,与活动链轮固定联结的托架始终保持竖直位置。活动链轮通过链条与固定链轮相联接,由固定在转臂上的链条张紧装置使链条张紧。转臂托起钢管转过一定角度后,再把钢管放在输送辊道上,这样就完成了一个工作行程。
1.2 管坯运动过程分析
托架和管坯作平动,其上各点的轨迹形状相同,在每一瞬时,各点的速度相同,加速度也相同,因此,求刚体的运动就转化为求管坯中心点A的运动。其机构运动简图如图3所示。

图3 惠斯顿杠杆机构运动简图
设钢管中心A点的坐标为(XA,YA),速度为v,传动轴角速度为ω,取XO1Y为直角坐标系,则A点的运动方程为

由(1)2+(2)2得轨迹方程为

式中:H=h+r,r为管坯的半径。
由此可见,点A的轨迹是以O3(0,H)为中心,R为半径的圆,其运动轨迹如图中双点划线所示。
速度在各坐标轴上的投影等于动点的各对应坐标对时间的一阶导数,则:

式中: ω=dβ/dt。
由式(4)和式(5)可知,A点的速度与回转臂半径和传动轴转速均成正比。当β=0°时,此时vx=0, vy=ωR;当 β=180°, 此时 vx=0 , vy=-ωR。 在托架托起钢管和放下钢管时,托架和管坯之间以及管坯和辊道之间都会产生碰撞,由于碰撞时间极短,根据动量定理,将出现很大的碰撞力,影响管坯的表面质量。因此,就要求vy越小越好。也就是接钢和放钢时传动轴的转速越小越好。但又受到生产效率的限制,ω不能太小,为了解决这个矛盾,这就要求传动轴在接钢和放钢时低速运行,而在其它时间内要求快速运动。为此,根据工艺要求制定速度图如图4所示。
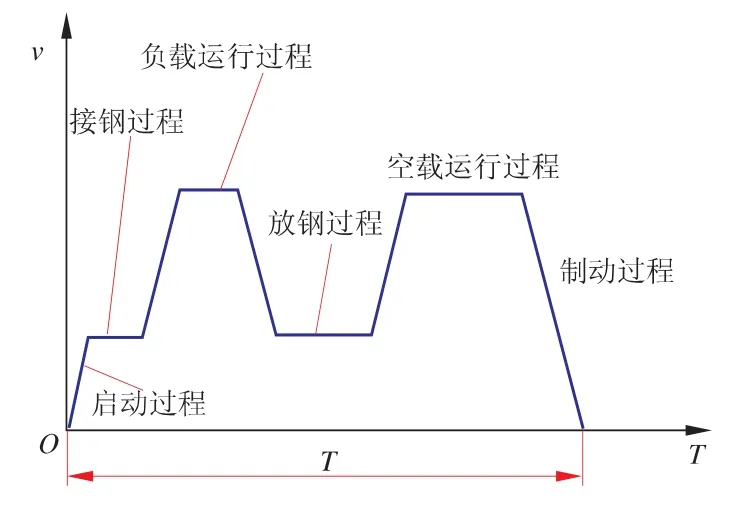
图4 惠斯顿杠杆速度图
由图4可见,在冷床下料时,电机要经历拖动运行和制动运行两个阶段。根据设备的运行工况可分为起动过程、接钢过程、负载运行过程、放钢过程、空载运行过程以及制动过程六个阶段,可以用电气控制很方便的实现这些要求。
1.3 刚体运动的合成
将动系固结在转臂上,设活动链轮的相对角速度ω1r和固定链轮的相对角速度ω2r分别绕O1,O2做定轴转动,牵连角速度ω,两轮的绝对角速度ω1,ω2,其方向如图5所示。则

图5 活动铰链速度分析图

式中: ω1=0, ω1r/ω2r=r2/r1=1, r1和 r2分别为固定链轮和活动链轮的半径。
由上式可解出ω2=0,α2=0
即轮2(活动链轮)做平动,因而可保证托架开口始终处于竖直方向。
2 在超声波探伤取管器中的应用
宝鸡住金石油钢管有限公司生产线中的取管器布置在超声波探伤设备与精整台架之间,主要作用是将精整台架上的管坯逐根快速横向移送至超声波前输送辊道,然后将钢管焊缝旋转至朝上,以便进行超声波探伤。其结构如图6所示。
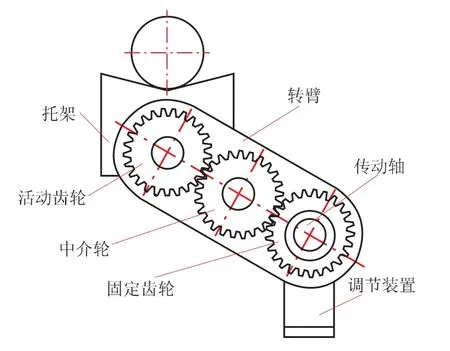
图6 超声波探伤取管器结构简图
此装置托架也是一种以平动方式运行的机构,其组成、工作原理和运动分析与上述冷床下料移送装置基本相同,区别在于后者是采用齿轮传动的行星轮系,无张紧轮装置,结构较前者紧凑,外廓尺寸较小,中间齿轮齿数的多少并不影响传动比的大小,而仅起着中间过渡和改变从动轮转向的作用。
此装置为周转轮系中的行星轮系,固定齿轮1为太阳轮,齿轮2为中介轮,活动齿轮3为行星轮,转臂为行星架H,这样就构成了具有固定轮的K-H型行星轮系。已知Z1=Z3,转臂角速度为ωH, 则

式中固定链轮1固定ω1=0。

因转臂角速度ωH≠0,所以,ω3=0。

这说明了行星轮 (活动齿轮)不转动,而与固定于其上的托架一起只做平动。其次,行星轮具有自转,自转转速与行星架转速大小相等,方向相反。这与冷床下料移送装置的结果完全吻合。
3 在旋转热锯中的应用
热锯有往复式和旋转式两种。前者是载锯台车与管坯以相同的速度移动,在移动中进行切断的一种锯。切断完成后,台车后退到原位,以待下次切断。而旋转式热锯是将锯片装在锯臂上,通过内部带有锥齿轮的行星轮系,使锯片和电机始终做与钢管轧制方向垂直的平动;同时,锯臂与导轮都通过主电机驱动,因而能保证锯臂与导轮的同步转速。其与往复式热锯相比,具有投资小,效率高,占地面积小,可自动实现优化切割等优点。其结构简图如图7所示。

图7 旋转热锯结构简图
此装置主要由传动部分,锯臂、内部周转轮系、导轮及锯片与电机等组成。通过底部三个锥齿轮将主电机的运动分为两路传出,一路驱动导轮转动,一路驱动锯臂转动,这就保证了锯臂与导轮具有相同的转速。上部锥齿轮1(太阳轮)与前述钢管横移装置用途相同,空套在轴上,其作用是通过调整此锥齿轮可对锯片与电机的方向进行微调,以保证锯片始终与钢管轧制线垂直。
对于由圆锥齿轮所组成的周转轮系,此装置为双排锥齿轮外啮合周转轮系,齿数Z1=Z2=Z2’=Z3,锯臂角速度为ωH,则锯片的合成运动为平动。
4 结 语
(1)通过对宝鸡石油钢管有限责任公司钢管横移装置和旋转热锯的组成原理和运动过程的研究分析可知,这些机构都是由惠斯顿杠杆机构演化而来,都具有转臂和微调装置,较步进梁式钢管横移装置,其结构简单、效率高、易于维护。
(2)钢管横移装置无论是从低位移动到高位或由高位到低位移动,都能够在保证管坯表面质量的前提下平稳、迅速、准确地横移管坯,而且能够减少噪声,改善工作环境。旋转热锯能够实现在线钢管的切头、尾和定尺切割功能,控制过程自动、灵活,可根据母管长度自动优化切割,因而在制管和棒材生产线上得到广泛的应用。
[1]哈尔滨工业大学理论力学教研室.理论力学上册[M].第5版.北京:高等教育出版社,1996.
[2]孙桓,陈作模.机械原理[M].第6版.北京:高等教育出版社,2000.
[3]赵子瑜.新编焊接钢管生产技术与质量检测标准汇编实用全书[M].北京:北京工业大学出版社,2006.
[4]闻邦椿.机械设计手册[M].北京:机械工业出版社,2010.
[5]楼鸿棣.邹惠君.高等机械原理[M].北京:高等教育出版社,1990.
[6]成大先.机构设计手册 [M].北京:化学工业出版社,2002.[7]濮良贵.纪名刚.机械设计[M].第7版.北京:高等教育出版社,2001.
[8]范钦珊.工程力学[M].第2版.北京:清华大学出版社,2012.
[9]机械工程师手册编委会.机械工程师手册[M].北京:机械工业出版社,2007.
[10]郑文纬.机械原理[M].北京:高等教育出版社,1997.
猜你喜欢
钛工业进展(2021年1期)2021-03-13
轮胎工业(2020年2期)2020-03-01
冶金设备(2019年6期)2019-12-25
天津冶金(2018年3期)2018-07-27
中国有色金属学报(2017年12期)2017-03-02
现代冶金(2016年6期)2016-02-28
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
钛工业进展(2014年5期)2014-02-28