
模糊自适应PID在大功率半导体温度控制中的应用
2015-01-22 11:33尹振红
产业与科技论坛 2015年13期
□ 尹振红
一、引言
现代科学技术正在迅速发展,半导体激光器以其重量轻,体积小,价格低,功耗低,结构简单,方便调试等特点,广泛应用于激光测速,远距离传输,激光雷达,激光制导跟踪,激光通信等国防建设和国民经济的各个领域。但是,其输出波长随着温度的变化而变化,一方面影响激光器的使用寿命,另一方面,其温度和使用的时间变化可以使输出功率产生漂移,所以我们要对半导体激光器的温度进行控制,使其尽量工作在恒定温度下,这样温度控制是非常必要的。当然,进行恒温控制的方法也有很多,本文主要对大功率半导体激光器的温度实现传统PID和模糊自适应PID,并对其进行仿真分析,利用模糊控制来提高系统的鲁棒性,利用传统PID来提高系统的控制精度。
二、半导体激光器的温度控制系统
虽然半导体激光器是一种高效率的电子-光子转换器件,但是因为各种非辐射复合损耗、自由载流子吸收等损耗机制的存在,使其外微分量子效率只能达到20% ~30%,这表明有大量注入的电功率将转化为热量,引起激光器温度升高。半导体的温度升高会使阈值增加,输出功率减小;当注入电流相等时,温度高的激光器对应的正向压降也大,这会给恒流源的设计带来不便;所以对半导体进行温度控制十分必要,这里采用半导体制冷器(TEC,Thermoelectric Cooler)对半导体进行制冷和温度控制。
半导体温度控制框图如图1所示,把半导体激光器,制冷器和测量变送环节作为广义环节,由实验方法得出广义环节的数学模型
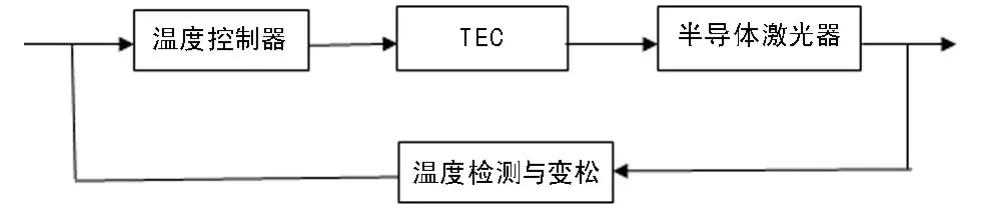
图1 半导体温度控制框图
三、温度控制系统仿真分析
(一)传统PID控制系统。在控制系统中引入比例部分,它可以快速成比例地反映控制系统的偏差信号e(t),然后最快地产生控制作用,使偏差向最小的方向变化。随着比例系数的增加,稳定误差逐渐减小,但这时它的动态性能会变差,会产生比较严重的振荡,会使超调量增加;引入积分部分可以消除静差,积分作用的强弱取决于积分时间常数Ti,时间常数Ti越大其积分作用越弱,而时间常数Ti越小其积分作用越强;随着积分时间常数Ti的减小,静差也在减小;但过小的积分常数会使系统振荡剧烈,甚至使系统失去稳定性;引入微分部分可以改善系统的稳定性和动态响应速度,它可以预测将来,能反映偏差信号的变化趋势,并能在偏差信号值发生过大的改变之前给系统提供一个有用的早期修正信号,进而使系统的动态响应速度加快,使调节时间减小,图2为传统PID控制框图。
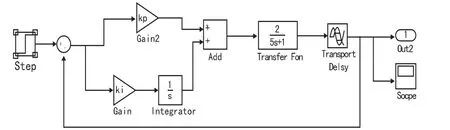
图2 传统PID控制框图
根据不同的被控对象,调整比例积分微分参数,可以得到很好的控制效果,这种方法简单,调控参数方便,一直是应用比较广泛的算法,但是对于时变系统它的控制功能会变差,而且它不具备在线调整比例积分微分参数的功能,不能够在不同偏差和不同偏差变化下进行PID参数的自整定。
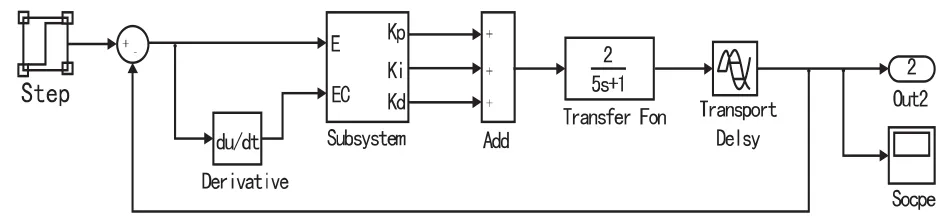
图3 模糊自适应PID控制框图
(二)模糊自适应PID控制系统。模糊自适应PID控制的主要思路是:在系统运行时不断检测偏差和偏差变化率,根据比例积分微分三个参数和以上两个参数的模糊关系在线调整比例积分微分,使其满足偏差和偏差变化率不同时对控制参数的不同要求。模糊自适应PID控制框图如图3所示,其子系统Subsystem框图如图4所示。
(三)传统PID控制与模糊自适应PID控制仿真。传统PID控制系统与模糊自适应PID控制系统在单位阶跃下的仿真曲线如图5所示,模糊自适应PID明显比传统PID控制的超调量小了,相应时间变小,具有良好的动态和静态性能。
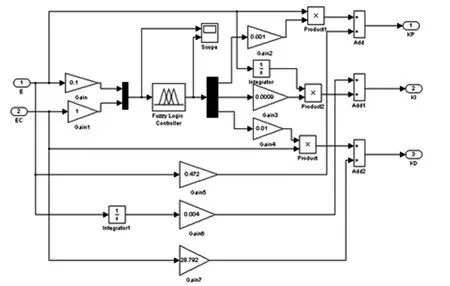
图4 Subsystem仿真结构图

图5 传统PID控制与模糊自适应PID控制仿真曲线
[1]马骁宇,王俊,刘素平.国内大功率半导体激光器研究及应用现状[J].红外与激光工程,2008
[3]安龙华.LD抽运固体激光器控制系统的研究与开发[D].西安理工大学,2007
[4]姚建铨.我国全固态激光技术研发情况及发展趋势[J].光学与光电技术,2007
[5]张娜.大功率半导体激光器稳恒控制系统研究与设计[D].吉林大学,2003
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
汽车维修技师(2019年7期)2020-01-16
重型机械(2019年3期)2019-08-27
电机与控制学报(2018年8期)2018-05-14
汽车维修技师(2018年11期)2018-05-11
海峡科技与产业(2017年12期)2018-01-18
制造技术与机床(2017年3期)2017-06-23
中学生数理化·高一版(2017年1期)2017-04-25
电子制作(2016年21期)2016-05-17
新高考·高一物理(2014年4期)2014-09-17
