永磁同步电机直接转矩控制模型
2015-01-15 05:48:54徐海林
服装学报 2015年1期
徐海林, 惠 晶
(江南大学 轻工过程先进控制教育部重点实验室,江苏 无锡214122)
直接转矩控制(Direct Torque Control,DTC)系统是20 世纪80 年代中期发展起来的一种高性能异步电动机变频调速系统[1]。不同于矢量控制,直接转矩控制具有鲁棒性强、转矩动态响应速度快、控制结构简单等优点[2]。DTC 技术最初是用于异步电动机的控制系统中,近年来不断用于永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)的控制中[3]。永磁同步电机的转子为永磁体,不需要励磁绕组励磁,电机体积小、质量轻、效率高,应用于各种伺服系统中[4-5]。
文中根据永磁同步电机的数学模型,得出直接转矩控制系统的原理,采用Matlab/Simulink 软件对该系统进行仿真研究,并给出仿真结果。
1 永磁同步电机的直接转矩控制
1.1 永磁同步电机的数学模型
永磁同步电机磁链、电流和电压矢量关系如图1 所示[6]。其中d,q 坐标为固定在转子上的旋转坐标,x,y 坐标为固定在定子上的旋转坐标,定子磁链方向为x 轴正方向,x 轴与d 轴夹角δ 为转矩角。
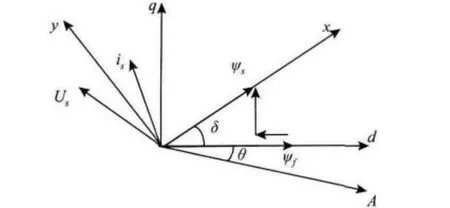
图1 同步电机定转子参考坐标Fig.1 Synchronous motor stator and rotor’s reference frame
建立正弦波永磁同步电机的d-q 轴数学模型。假设:
1)电机的磁路是线性的,不计磁路饱和、磁滞和涡流的影响;
2)三相绕组是完全对称的,在空间互差120°,不计边缘效应;
3)忽略齿槽效应,定子电流在气隙中只产生正弦分布的磁动势,忽略高次谐波;
4)不计铁心损耗[7]:当永磁同步电机的电流为对称的三相正弦波电流时,基于转子坐标系的永磁同步电机的电压、磁链和电磁转矩方程为
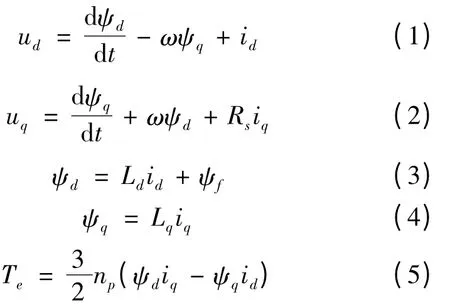
其中:ud,uq,id,iq分别为定子电压和电流的d,q 轴分量;Rs为定子电阻;Ld,Lq,ψd,ψq分别为定子d,q轴电感和磁链;ψf为转子磁链;ω 为用电角度表示的同步转速;Te为电磁转矩;np为电机极对数。
将转子定向的d-q 坐标系中的物理量变换到定子磁链方向的x-y 坐标系中,可利用变换公式:

其中F 可代替为电压、电流和磁链的空间矢量。
根据式(6)可知,磁链ψs在x-y 轴上表示为

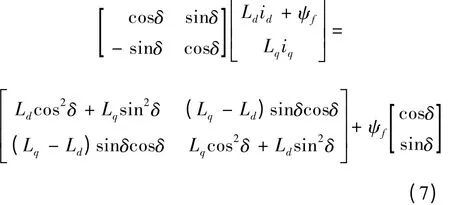
因为定子磁链按x 轴定向,所以ψx=| ψs|,ψy=0,代入式(7)得
运用式(6)将id,iq以ix,iy表示后分别代入式(5),得电磁转矩Te在x-y 轴系上的表达式为
将式(9)代入式(10)得电机的转矩表达式:

对于具有面装式转子结构的永磁同步电机,Lq=Ld= Ls,Ls为等效同步电感,电磁转矩Te可以表示为

将式(12)求导可得

由此可知,当保持定子磁链为恒值,永磁同步电机的转矩随转矩角而变化。因此,永磁同步电机直接转矩控制的基本思想是保持磁链幅值不变,控制定子、转子磁链间的夹角实现控制电机的电磁转矩[8]。
1.2 直接转矩控制的原理
永磁同步电机直接转矩控制的控制框图如图2所示。它由逆变器、PMSM、磁链估算、转矩估算、区域判断、开关表、转矩比较器、磁链比较器等组成。系统将传感器测得的电机实际转速与给定转速比较,经PI 调节器给出电机转矩的给定值,实时检测逆变器的电压和电流,α-β 坐标系中的分量通过3/2变换得到,从而通过磁链估算和转矩估算得到ψs和T。转矩给定值T*与实时计算转矩值T 比较,通过转矩比较器,产生转矩控制状态τ;定子磁链给定与磁链实际值ψs比较,通过磁链比较器产生磁链控制状态Ф,由τ,Ф,θ(磁链所处的空间角)决定所选电压矢量,作为逆变器开关器件驱动信号,实现直接转矩控制。

图2 直接转矩控制系统Fig.2 Block diagram of the direct torque control system
在实际的直接转矩系统中,采用的是两相静止坐标(α-β 坐标),为了简化数学模型,由三相坐标变换到两相坐标是必要的,所避开的仅仅是旋转转换[9]。
坐标变换公式为
式中:xα,xβ为α-β 坐标系变量;xa,xb,xc分别为abc坐标系变量。
在两相α-β 坐标系下定子磁链模型和电磁转矩模型为
式中:ψα,ψβ为α-β 轴上定子磁链的分量;uα,uβ为α-β 轴上电压的分量;iα,iβ为α-β 轴上电流的分量;Rs为定子电阻;np为电机极对数。
直接转矩控制技术是借助于控制逆变器输出的8 组电压空间向量实现(其中有两组为零矢量)[10]。为保持电机定子磁链幅值恒定,可计算出给定磁链与实际磁链的偏差与磁链具体方向,适时选择合适的电压空间矢量,以达到保持定子磁链恒定。电压矢量和区段划分如图3 所示。

图3 电压矢量和区段划分Fig.3 Positions of the stator space voltage vector for each switching state
实际控制时,可以根据磁链所在区域和磁链的旋转方向确定保持磁链恒定的开关表,控制系统根据电机当时磁链及转矩实际情况选用合适的开关信号,由此决定主电路开关器件的开关状态。逆变器的开关如表1 所示。表中θ(N)为定子磁链的区间信号,τ 为转矩调节信号,Ф 为磁链调节信号。
为了方便在Matlab 中实现开关表,定义S = 2 Φ +τ +1。这样定义可以根据S 和θ 的值通过二维查表方法查询开关表的值。当给定值比实际值大时Φ,τ 状态为1,否则状态为0。
2 基于Matlab 的PMSM 的仿真模型
根据永磁同步电机的直接转矩原理及其数学模型,利用Matlab7.11.0 中的Simulink 工具建立永磁同步电动机直接转矩控制系统的仿真模型,如图4 所示。

表1 逆变器开关表Tab.1 Switching table of inverter

图4 永磁同步电机直接转矩控制系统仿真Fig.4 Blocks for the simulation of the DTC under Matlab/Simulink
各个模块功能如下:
1)定子磁链及电磁转矩估算,根据式(14)进行3/2 变换得到定子电压和定子电流在α-β 轴上的分量。根据式(15)和式(16)得到定子磁链和电磁转矩的实际值,具体模型如图5,6 所示。其中ia,ib为α-β 轴上电流的分量iα,iβ;ua,ub为α-β 轴上电压的分量ψα,ψβ;cia,cib 为α-β 轴上定子磁链的分量ψα,ψβ;Te,Rs为电磁转矩Te,定子电阻Rs。

图5 磁链估算Fig.5 Flux estimation
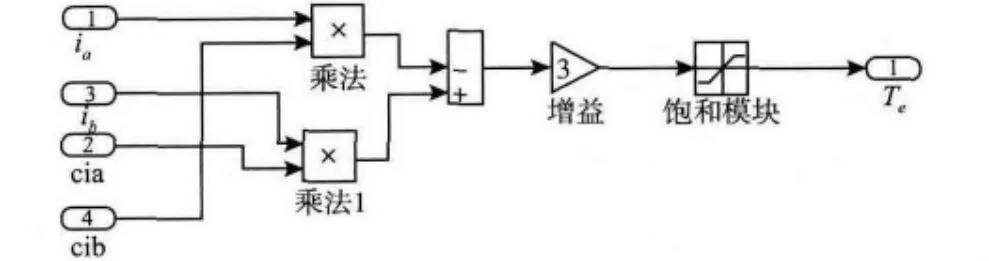
图6 转矩估算Fig.6 Torque estimation
2)转矩比较器和磁链比较器:转矩给定T*e 可以由PI 控制器输出获得。将转矩给定T*e 和电磁转矩模块所得到的转矩的实际值Te的差值通过滞环比较器,得到转矩调节信号τ。
3)区段判断器:定子磁链矢量所在区段可以根据磁链在α-β 坐标上的分量ψα,ψβ进行判定,由ψα的正负决定定子磁链矢量的象限,arctan(ψβ/ψα)决定定子磁链的空间电角度δ,再根据空间分区判断定子磁链所在区段。δ 的计算和区段判断都是调用M 函数来实现的。
4)逆变器开关状态选择:根据磁链、转矩的误差状态以及磁链所在的区段,根据表1 选择逆变器开关状态。此模块的输入信号是磁链控制信号、转矩控制信号、磁链所在区段,输出为六维空间矢量。在该仿真系统中通过Simulink 中的lookup table 模块来实现此功能。
5)逆变器的驱动信号产生模块:根据逆变器开关表,由lookup table 和非门得到一组逆变器的驱动信号,如图7 所示。其中,SF 为磁链调节信号Φ;STe为转矩调节信号τ;Sector 为定子磁链区间信号θ(N)。
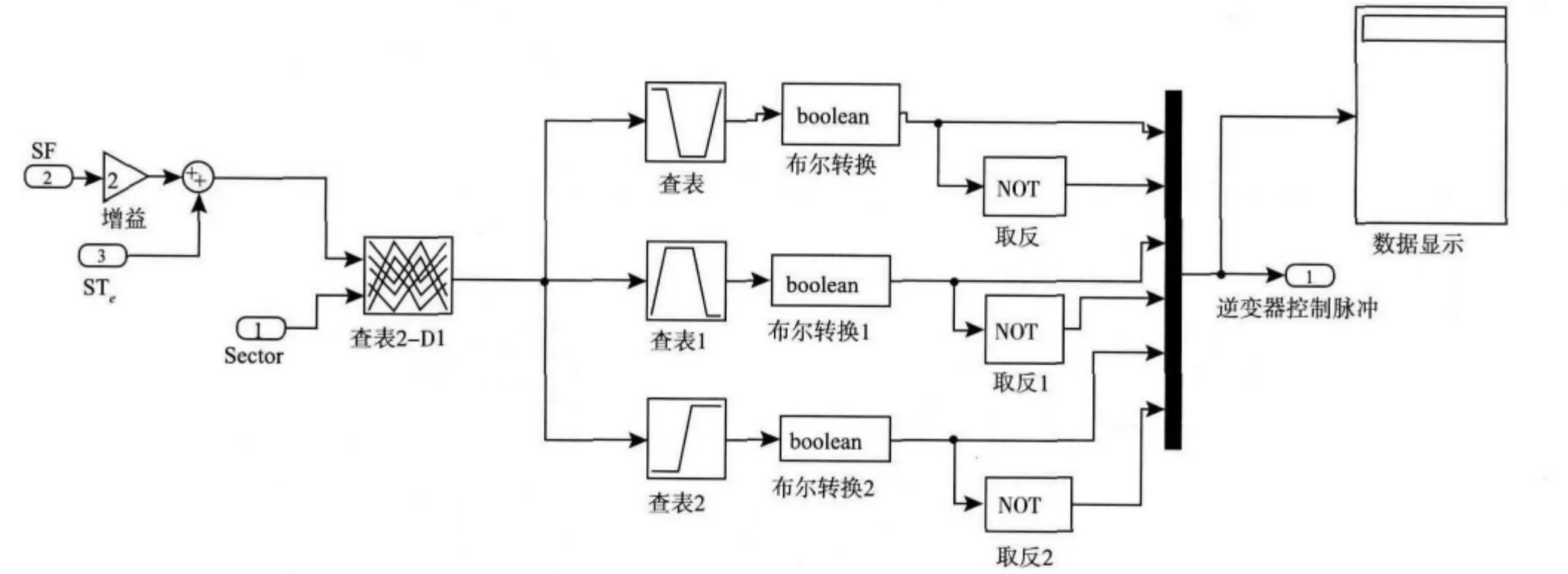
图7 逆变器的驱动信号产生模块结构Fig.7 Simulink model of inverter drive signal
3 仿真结果及分析
本系统的参数:定子电阻Rs= 3 Ω,交轴、直轴的等效电感Ld= Lq= 0.168 H,定子磁链ψf=1 Wb,转动惯量J = 0.000 8 kg·m2,黏滞系数B =0,极对数np= 2。仿真过程描述:电机的转矩起初值为2 N·m,在0.2 s 时变为6 N·m;电机的转速起初值为0,最终变为2 000 r/min。在此过程中磁链的给定值始终为1 Wb。仿真结果如图8,9 所示。
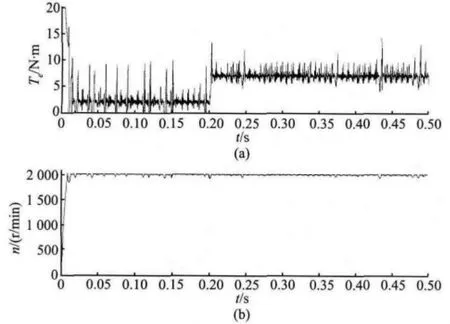
图8 转矩及转速Fig.8 Electromagnetic torque and speed
图8 为系统的电磁转矩和转速的仿真波形,在0.2 s 时转矩达到6 N·m,在此过程中转矩会产生一定的脉动;在0.02 s 时转速达到2 000 r/min 并保持稳定。由图9 可以明显看到磁链轨迹基本为圆形且波动很小。
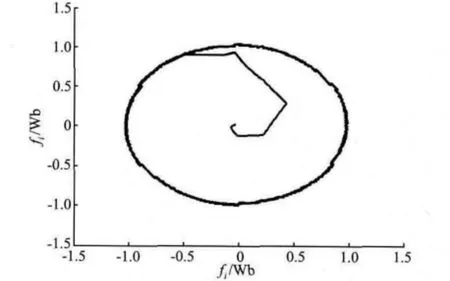
图9 磁链轨迹Fig.9 Trajectory of flux
从仿真结果分析,该控制系统达到预期效果,验证了永磁同步电机直接转矩控制的正确性和可行性,为实际系统的实现提供了基础,但是在仿真中有很多理想化模型,真正实现PMSM 直接转矩控制还需要考虑众多因素。
4 结 语
分析了PMSM 数学模型和直接转矩控制的原理,利用Matlab/Simulink 软件对PMSM 直接转矩控制系统进行数学建模仿真。仿真结果表明该直接转矩控制系统模型转矩响应快,鲁棒性好,具有良好的动态性能,为PMSM 控制系统的设计提供参考。
[1]YU Zhigen,ZHOU Baiqing.Research on direct torque’s control strategy for three-level inverters based on PI regulating[C]//2010 International Conference on Electrical and Control Engineering.Wuhan,China:IEEE,2010:1672-1675.
[2]Satheesh M,Ramesh Babu P,Ramprasath S.Four quadrant operation of direct torque control-SVPWM based three phase induction motor drive in Matlab/Simulink environment[C]//2012 IEEE International Conference on Advanced Communication Control and Computing Technologies.Rohtak,Haryana,India:IEEE,2012:397-202.
[3]林飞,杜欣.电力电子应用技术的Matlab 仿真[M].北京:中国电力出版社,2009.
[4]陈伯时.运动控制系统[M].北京:机械工业出版社,2003.
[5]郭新华,温旭辉,赵峰,等.基于电磁转矩反馈补偿的永磁同步电机新型IP 速度控制器[J].中国电机工程学报,2010,30(27):7-13.GUO Xinhua,WEN Xuhui,ZHAO Feng,et al. New IP speed controller of permanent magnet synchronous motor based on the feedback compensation of the electromagnetic torque[J].Proceedings of the CSEE,2010,30(27):7-13.(in Chinese)
[6]杨影,陈鑫,涂小卫.占空比调制的永磁同步电机直接转矩控制[J].电机与控制学报,2014,18(4):66-71.YANG Ying,CHEN Xin,TU Xiaowei.Direct torque control of permanent magnet synchronous motor based on duty ratio control[J].Electric Machines and Control,2014,18(4):66-71.(in Chinese)
[7]GUO Qing,GAO Yun.Simulation research of direct torque open-loop control system based on Matlab[C]//2012 3rd International Conference on System Science,Engineering Design and Manufacturing Informatization.Chengdu,China:IEEE,2012:76-79.
[8]李玥,解大琴.三相交流电机直接转矩控制研究[J].宝鸡文理学院学报:自然科学版,2013,33(2):1-4.LI Yue,XIE Daqin.The research of three-phase AC motor based on direct torque control[J].Journal of Baoji University of Arts and Sciences:Natural Science,2013,33(22):1-4.(in Chinese)
[9]高健,姜星星.基于SVM 的永磁同步电机直接转矩控制的仿真研究[J].科学技术与工程,2013,13(1):63-69.
GAO Jian,JIANG Xingxing. Simulation study in direct torque control for permanent magnet synchronous motor based on space vector modulation[J].Science Technology and Engineering,2013,13(1):63-69.(in Chinese)
[10]孙文,张兴华.永磁同步电机直接转矩控制的效率优化[J].工矿自动化,2014,40(3):56-59.
SUN Wen,ZHANG Xinghua.Efticiency optimization of direct torque control for permanent synchronous motor[J].Industry and Mine Automation,2014,40(3):56-59.(in Chinese)
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
光学精密工程(2016年3期)2016-11-07 09:03:49
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年23期)2014-04-04 12:08:30
电测与仪表(2014年11期)2014-04-04 09:21:36
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29