
异步电机三电平DTC 合成矢量优化研究
2015-01-13 10:15:08蔡文皓
微特电机 2015年10期
蔡文皓,罗 强,王 超
(西安科技大学,西安710054)
0 引 言
三电平中点箝位式逆变电路在中压、大容量电机变频调速场合中应用广泛,具有对开关器件耐压要求低、输出谐波少、控制性能好等优点[1]。
直接转矩控制(以下简称DTC)是一种高性能异步电机控制策略[2],以定子磁链与转矩为控制变量,计算定子静止坐标系下磁链和转矩大小,并通过跟踪控制磁链和转矩的变化,实现PWM 调制和控制系统的高动态性能。直接转矩控制具有结构简单、转矩响应快速、鲁棒性好等特点[3]。
文献[4]提出了采用三电平逆变电路的异步电机直接转矩控制方案,并从原理上分析了整个控制系统,但没有用到合成矢量方法。文献[5]在分析单一矢量三电平DTC 基础上,提出了合成矢量方法的三电平DTC 系统。但从仿真结果来看,该方法没有有效解决三电平逆变电路的两个固有问题[6]:逆变器直流侧中点电位波动问题和逆变器输出电压跳变问题。文献[7]提出了新型扇区划分和细分技术,为本文中扇区划分提供了思路。
本文提出了一种合成矢量的优化方法,并将其应用到DTC 系统中。该方法既有效抑制了三电平逆变器中点电位波动,降低了开关管开关损耗,使逆变器输出电压不会发生跳变,同时DTC 调速性能不受影响。
1 直接转矩控制的基本思想
电机定子电压方程:

式中:us,is,ψs分别为电机定子电压、电流及磁链矢量;Rs为定子电阻。
忽略定子电阻上的压降,则电机定子磁链矢量可表示:

由式(2)可知,定子磁链矢量ψs轨迹变化的方向与电压矢量us同向,轨迹的变化速率由电压矢量幅值来决定。
电磁转矩表示如下:

式中:p 为电机极对数;Lm为定转子互感;Ls为定子自感;Lr为转子自感;漏感系数σ=1-/(LsLr);θ为定转子磁链间夹角;ψr为转子磁链矢量。
异步电机在稳定运行时,定转子磁链幅值基本不变,因此定转子磁链之间的磁通角θ 的变化会直接导致电磁转矩的变化。由式(3)可知,让定、转子磁链幅值基本保持不变,改变定、转子磁链间夹角可使电磁转矩发生变化。由于ψs快速变化时,可以认为|ψr|相对不变,且结合对式(2)的分析,直接对定子磁链施加控制,可实现控制转矩的目的。
2 直接转矩控制系统结构及原理
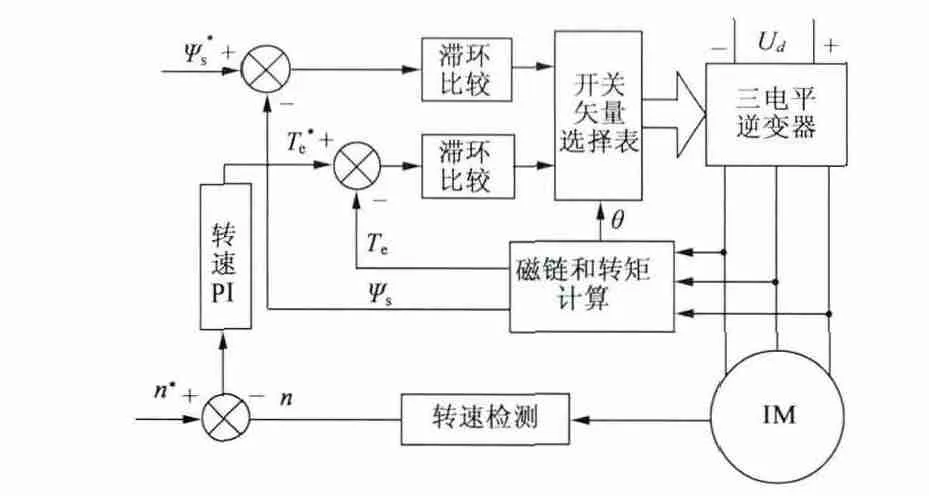
图1 直接转矩控制系统结构框图
转速检测获得电机转速参考值,经过PI 调节器给出转矩给定值;计算电机在α-β 坐标系下的数学模型得出转矩和磁链参考值;滞环比较器输出转矩和磁链的控制信号;控制信号在不同扇区内控制逆变器开关器件的导通和关断,实现对电机的调速。
2.1 三电平合成矢量优化与中点电位平衡控制
NPC 三电平逆变器拓扑结构图如图2 所示。
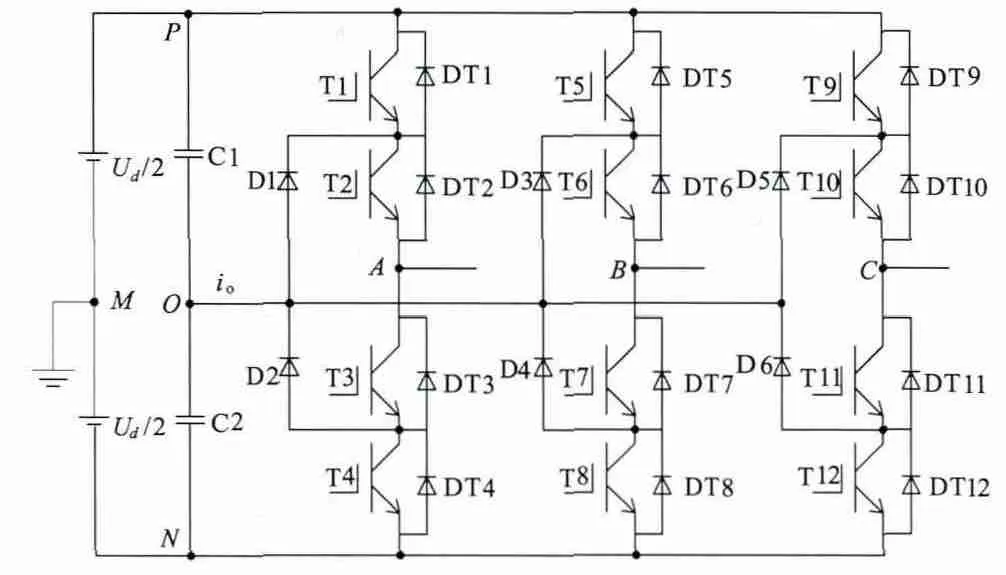
图2 NPC 三电平逆变器拓扑结构
NPC 三电平逆变电路,每相桥臂有3 个开关状态P、O、N,三相共可得到27 个电压矢量。在α-β平面上,电压矢量分布如图3 所示。将27 个电压矢量分为四类:零矢量、大矢量(V13-V18)、中矢量(V7-V12)和小矢量(V1-V6),其中零矢量和小矢量有冗余小矢量。
合成矢量优化方法下,扇区的分法有所不同,用大矢量和中矢量将矢量空间分成12 等份,新的合成矢量位于各自扇区角平分线上,如图3 所示。
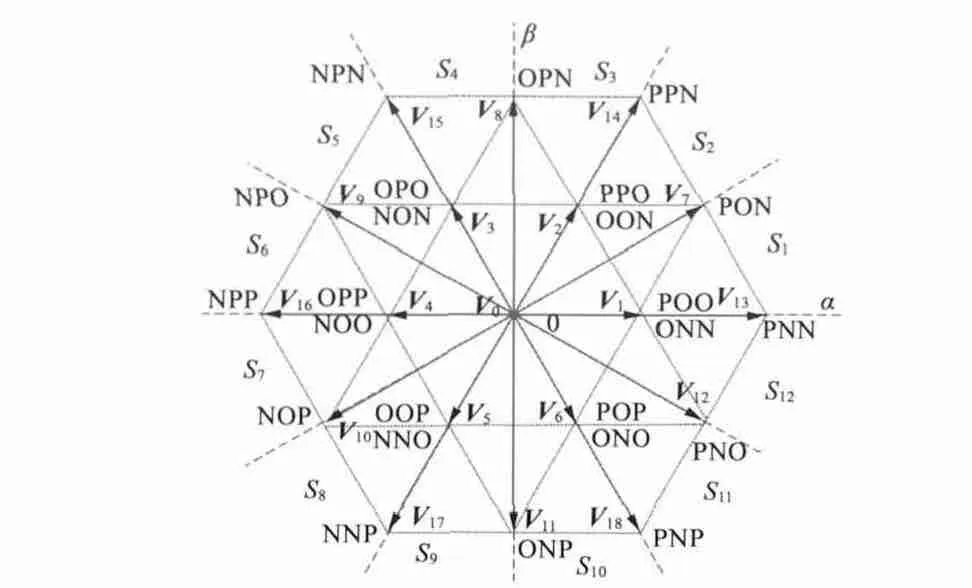
图3 优化合成矢量空间分布图
以扇区S1为例,利用该扇区边缘的四个矢量:小矢量ONN 和POO、中矢量PON、大矢量PNN,引入零矢量,合成矢量按照顺序Vs1:OOO-POO-PON-PNN-ONN来合成矢量,则每次矢量切换只有一相开关管动作,有效抑制电压跳变,减少开关损耗。这种矢量合成序列引入了中矢量,造成了中点电位波动。一般把其当作干扰量,由于小矢量及其冗余小矢量所对应的流过直流侧中点电流方向相反,对中点电位的影响也是相反的,故把小矢量视为调整量。
表1 给出了扇区S1内,合成矢量优化的矢量作用顺序,其他扇区矢量作用顺序原则相同。

表1 扇区S1 优化合成矢量表
干扰量为中矢量PON,调整量为小矢量POO 和ONN。若中点电位偏移量Vom≥0,说明中点电位偏高,需要引入中点电流从中点抽走电流以降低中点电位,若此时iA>0,则增加小矢量ONN 的作用时间比例,若此时iA<0,则增加小矢量POO 的作用时间比例。反之亦然。计算各有效矢量作用时间就成为关键。
现在以α 轴为参考轴,以2Ud/3 为单位幅值,在扇区S1中,设一个采样周期内大矢量、中矢量、小矢量的作用时间分别为T1,T2,T3,设零矢量作用时间0.05Ts,将合成矢量分解在α,β 轴上:
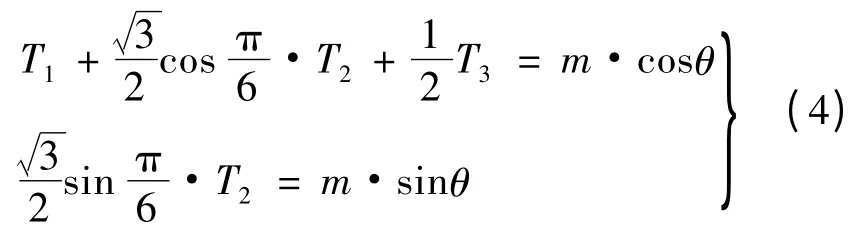
在一个采样周期中有T1+T2+T3=0.95Ts,且优化的合成矢量位于扇区中间,故θ =15°,若调制系数m=0.8,得:
将T3以合适比例分配给两个小矢量,矢量合成顺序和小矢量作用时间按照表1 所述规则。其他扇区合成矢量优化方法相同。
2.2 磁链和转矩控制
磁链控制器采用的是一个两级滞环比较器,如图4(a)所示。磁链偏差表示如下:

转矩调节器采用的是一个三级滞环比较器,如图4(b)所示。转矩偏差表示如下:

根据DTC 原理,由转矩和磁链的控制信号选择对应的电压矢量。表2 给出了定子磁链所在扇区k内不同效果下合成矢量选择原则,k =1 ~12(当k >12 时,k=k-12;当k <1 时,k=k+12)。
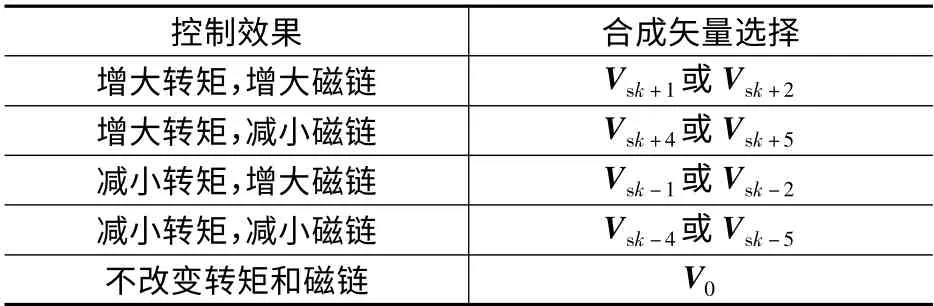
表2 合成矢量选择表
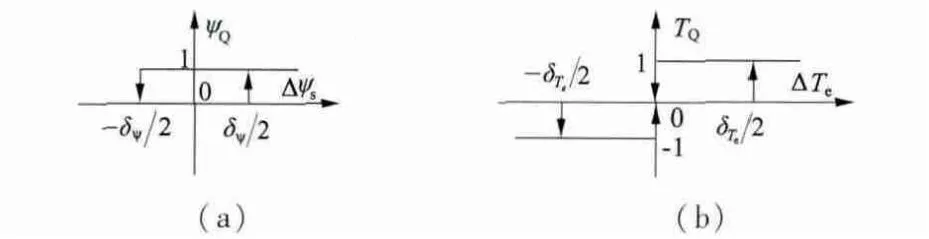
图4 磁链和转矩滞环控制图
2.3 三电平开关矢量表
根据以上分析,综合定子磁链所在扇区的判断和磁链与转矩的控制信号,表3 给出了不同控制信号下合成矢量的选择方案。

表3 三电平开关矢量选择表
3 仿真分析和讨论
根据上述分析,为验证该合成矢量优化方法和系统控制方法的可行性,建立异步电机三电平DTC仿真系统。选用电机参数:额定电压400 V,额定功率4 kW,2 极,额定转速1 430 r/min,定子电阻Rs=1.405 Ω,定子自感Ls=5.839 mH,转子电阻Rr=1.395 Ω,转子自感Lr=5.839 mH,定、转子互感Lm=172.2 mH。系统仿真条件:定子磁链给定0.97 Wb,定子磁链滞环环宽0.01 Wb,转矩滞环环宽0.4 N·m。初始给定转速1 400 r/min,0.5 s 时转速突降至1 200 r/min,电机负载10 N·m 起动,在0.2 s时突加转矩至30 N·m。
仿真结果如图5、图6 所示。图5(a)显示出定子磁链轨迹是很好的圆形。从图5(b)~图5(d)可以看出,在t=0 s 时,电机转速开始上升,负载10 N·m 起动,由于转速PI 调节器带输出限幅±50,起动中调节器处于饱和限幅状态,在不到0.1s 的时间内转速已达到设定转速1 400 r/min,转矩也同时达到10 N·m,三相定子电流呈稳定正弦规律变化。在t=0.2 s 时,负载突加至30 N·m,t =0.5 s 时,转速由1 400 r/min 降至1200 r/min。从图5(b)可以看出,不管是突加负载还是突降转速,电机转速都有很小脉动,但是能很快地跟随到给定值。从图5(c)可以看出,转矩增加时,转矩瞬间跟随至30 N·m,转速突降时,电机瞬间反转,导致转矩瞬间变负,但转矩响应迅速,很快达到新的稳定状态。从图5(d)可以看出,当突加转矩时,定子电流会突然增大,但很快恢复到稳定的正弦规律变化。
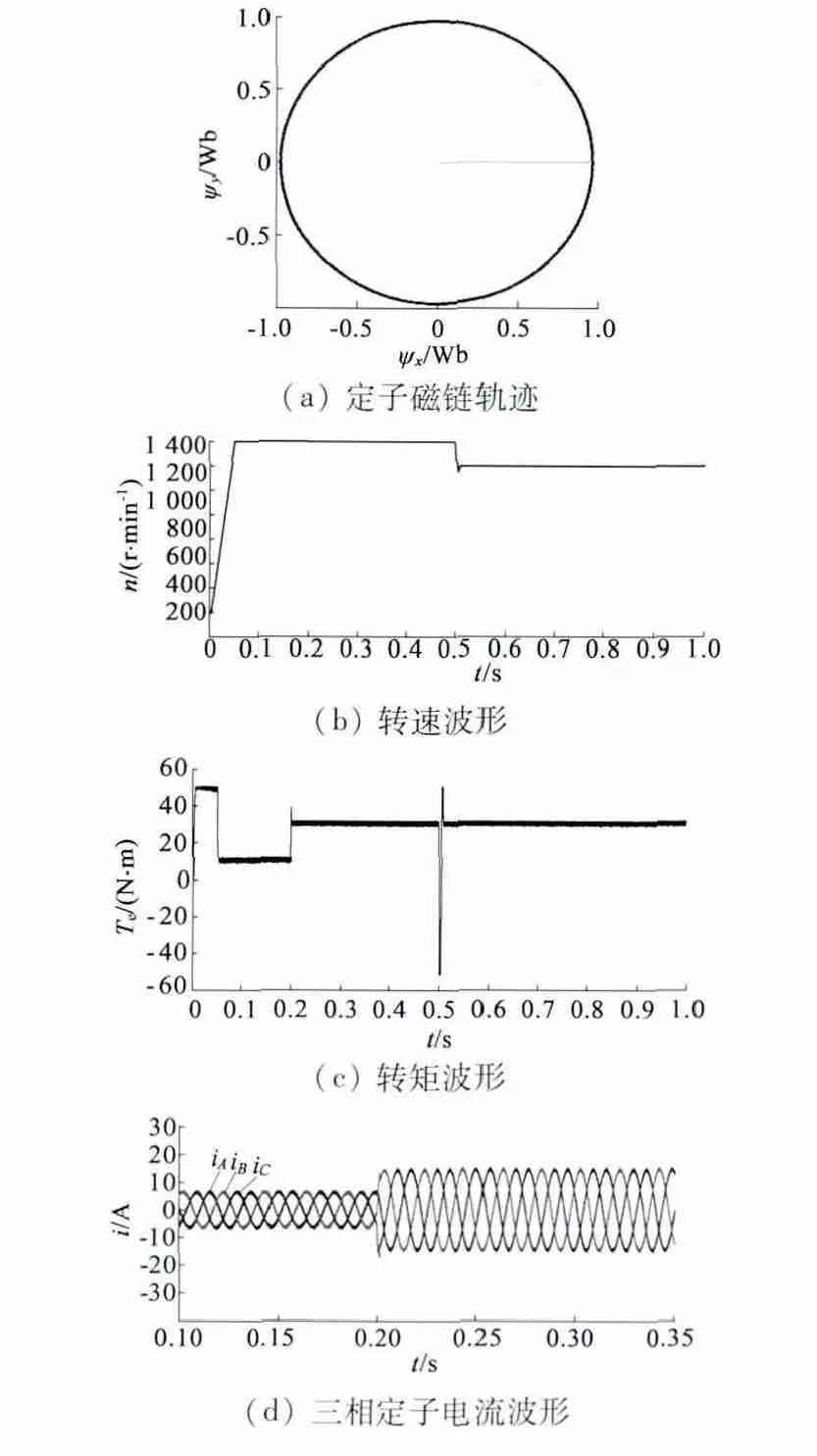
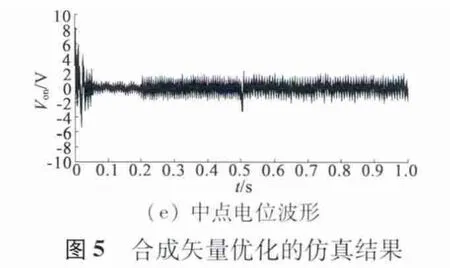
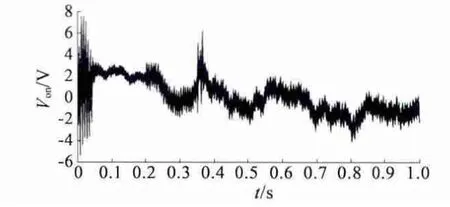
图6 合成矢量未优化的中点电位波形
从图5(e)和图6 的对比中可以看出,合成矢量优化对三电平逆变电路直流侧中点电位平衡控制效果显著,合成矢量优化的异步电机DTC 系统,在电机稳态运行时,中点电位在0 附近波动,不管负载增加还是转速降低,都能将中点电位控制在0 电位附近。
4 结 语
从研究效果来看,本文提出的异步电机三电平DTC 合成矢量优化系统能够较好地抑制三电平逆变器中点电位波动问题,同时在该方案下电机调速性能好,转矩脉动小,响应速度快,仿真结果证明该方案是一种优良的异步电机控制策略。
[1] CELANOVIC N,BOROYEVICH D.A comprehensive study of neutral- point voltage balancing problem in three-level neutral-point-clamped voltage source PWM inverters[J].IEEE Transactions on Power Electronics,2000,15(2):242-249.
[2] 陈伯时. 矢量控制与直接转矩控制的理论基础和应用特色[C]//电力电子论坛Ⅲ-变频器矢量控制与直接转矩控制技术研讨会,北京,2004.
[3] 胡虎,李永东.交流电机直接转矩控制策略-现状与趋势[J].电气传动,2004,(3):3-8.
[4] 潘登,任冲,柴文野,等.基于三电平逆变器供电的电机直接转矩控制系统[J].电机与控制应用,2011,38(7):13-16.
[5] 李永东,侯轩,谭卓辉.三电平逆变器异步电动机直接转矩控制系统(Ⅱ)-合成矢量法[J].电工技术学报,2004,19(5):31-35.
[6] 王广柱.二极管箝位式多电平逆变器直流侧电容电压不平衡机理的研究[J].中国电机工程学报,2002,22(12):111-117.[7] 吴志刚.直接转矩控制策略的扇区划分和细分技术[J]. 微特电机,2010,38(3):63-66.
猜你喜欢
南北桥(2022年2期)2022-05-31 04:28:07
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
西南交通大学学报(2016年4期)2016-06-15 20:29:36
电测与仪表(2016年10期)2016-04-12 00:26:38
电测与仪表(2016年22期)2016-04-12 00:19:58
计算机技术与发展(2016年10期)2016-02-27 00:44:08
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
