基于MPSO-BP 的超声波电动机Hammerstein 模型建模
2015-01-13 01:55张铁民张建桃杨秀丽漆海霞
微特电机 2015年12期
邢 航,张铁民,张建桃,杨秀丽,漆海霞
(华南农业大学,广州510642)
0 引 言
超声波电动机是通过压电元件产生超声波振动来驱动的新型电机,它具有很多优点,如起动转矩大、结构简单、不受电磁干扰、不产生电磁干扰等,但它随着驱动条件不同具有严重非线性以及负载依赖性,因此,超声波电动机建模是一件困难并有挑战性的工作,其建模的理论和方法有很多,如等效电路建模、有限元建模、解析法建模等,但这些方法都较复杂,难以实用。从实现超声波电动机高精度控制的角度,系统辨识法可以克服上述方法在控制器设计中存在的问题[1]。
文献[2]提出了一种基于Hammerstein 结构的超声波电动机建模方法,但该方法不仅复杂而且由于采用试凑法提取参数,不适合所有超声波电动机,因为即使是同类型的超声波电动机,除了动态特性不同外,静态特性也是不同的,且该方法处理时间长。文献[1]提出一种超声波电动机Hammerstein模型建模方法,该方法需要识别死区,但考虑了驱动电压对模型参数的影响。文献[3]提出的Hammerstein 模型,其非线性静态部分采用RBFNN 结合遗传算法来近似,线性动态部分采用一阶传递函数。
粒子群优化算法(以下简称PSO)与遗传算法很相似,都是基于迭代的优化算法,都具有全局、并行搜索特性,都可以用于识别非线性系统模型的参数。但与遗传算法相比,PSO 算法的优点是实现简单,性能良好,因此在短短几年间得到了快速发展。本文提出一种超声波电动机的Hammerstein 模型的建立方法,其非线性静态部分采用改进的粒子群优化BP(以下简称MPSO-BP)算法来近似,线性动态部分采用一阶传递函数模型。
1 超声波电动机建模
1.1 Hammerstein 模型
Hammerstein 模型由非线性静态模块和线性动态模块串联而成,结构如图1 所示。
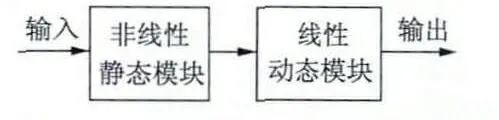
图1 Hammerstein 模型结构
在本文中,超声波电动机两相电压的相位差Φ 是输入的控制变量,v 是非线性部分的输出,是一个中间变量,ω 是Hammerstein 模型的输出。Hammerstein 模型的非线性静态部分采用MPSO-BP 算法建模,线性部分采用一阶传递函数模型,如图2 所示。

图2 超声波电动机的模型结构
一阶传递函数[4]:

式中:Km是超声波电动机的静态增益;τ 是时间常数;模型的参数可以从测量数据中提取。USR60 超声波电动机的参数如下[4]:Km=10.25,τ =0.003 5 s。
Hammerstein 模型的非线性静态部分采用如图3 所示的BP 神经网络来建模。输入层一个节点,为Φ,输出层一个节点,为ω。设隐层节点n 个,ω1i(i=1,2,…,n)是输入层和隐层节点间的连接权值,vi1(i=1,2,…,n)是隐层与输出层节点间的连接权值。隐层输出函数如下:

输出层单元的输出函数如下:
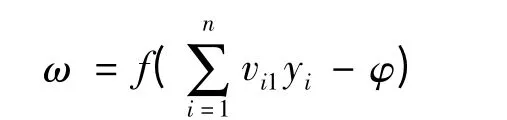
式中:yi(i=1,2,…,n)为隐层输出;θi是隐层阈值;φ 是输出层阈值,f(·)为神经元激活函数。
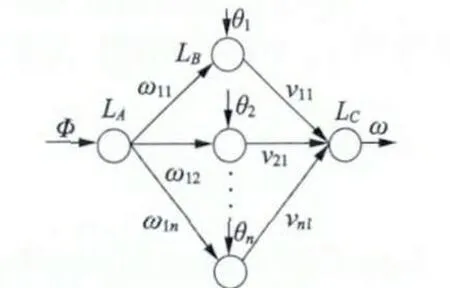
图3 BP 神经网络结构
由于BP 算法的优劣主要取决于初始权值和阈值选择,如果选择不合适,容易陷入局部最小,因此,本文利用MPSO 算法的全局搜索能力以及BP 算法的局部搜索能力,来优化初始权值和阈值,使其避免陷入局部最小。
1.2 MPSO-BP 算法
PSO 算法是1995 年提出的一种迭代进化算法,该方法从随机解出发,通过不断地寻找当前空间中的最优值来搜寻全局最优解。
1)标准PSO 算法
标准PSO 算法假设N 维空间中有m 个粒子,第i 个粒子在N 维空间中的位置用xi=(xi1,xi2,…,xiN)来描述,粒子的飞行速度vi=(vi1,vi2,…,viN),适应度值由目标函数确定,每个粒子当前位置为xi,截止当前最好的位置为pbest,在整个群体中最好的位置为gbest(gbest是pbest的最优值)[5],并用下面的公式来更新第i 个粒子的速度和位置,即通过第k 级推导第k+1 级的数据:
式中:c1,c2为加速度因子,用于调节每个迭代步的大小;rand()为[0,1]之间的随机数,i =1,2,…,N;k 为迭代个数;ω 为惯性因子。
2)改进的粒子群优化算法
在PSO 算法中,惯性因子较大,有利于跳出局部最小,实现全局搜索;惯性因子较小,便于实现局部搜索,算法易收敛。为了在全局和局部搜索之间找到最好的惯性因子,本文采用改进的惯性因子来改变收敛速度和精度。为了解决局部粒子早熟线性,并避免后面所有粒子集中于一个极值点附近,采用自适应速度调节因子,改进后的粒子群算法如下:
式中:α(m)是速度调节因子,m=1,2,…,j,j 是速度区间系数;ω'为改进的惯性因子。
惯性因子的改进策略如下:

式中:ωmax和ωmin分别是惯性因子的极大、极小值;t和tmax分别为当前的迭代个数和最大迭代个数;e 是用来调节速度变化的控制因子,一般e =10。这种方法可以实现在寻优的早期粒子保持高速飞行,在寻优中期逐渐将飞行速度减速,在寻优的后期保持一定的飞行速度以进行最后的收敛[6]。
速度调节因子α(m)用于决定放大或缩小粒子的新位置,函数如下[7]:
假设最大速度为vi1max,最小速度为vi2max,当≥vi1max时,α(m)减小寻优速度;当≤vi2max时,α(m)增大寻优速度;当vi2max≤≤vi1max时,将两个方向的大小放大或缩小,于是粒子可以有足够求解空间。
3)基于MPSO 算法的BP 神经网络算法
假设MPSO 中位置向量X 的元素是神经网络各个节点之间的权值和阈值,p 为样本数,c 为输出节点数为神经网络的期望输出,xi,j是神经网络的实际输出。每次迭代都找到一个最优的权值和阈值使得下面的均方误差最小:

基于MPSO 算法的BP 神经网络优化过程如下:1)建立BP 网络拓扑结构。2)初始化粒子群。初始化粒子的随机位置和速度,初始化迭代次数的最大值,将当前位置作为粒子的初始最好位置。3)将粒子的初始位置作为初始权值和阈值赋予BP 网络。4)确定个体的极值点。训练网络,计算粒子的适应度值(用式(6)),如果粒子的当前适应度值比历史上最佳适应度值更好,则将粒子当前位置赋予历史最好位置。5)确定全局最优极值。将每个粒子的当前阈值与gbest进行比较,如果当前适应度值比gbest小,则将当前适应度值赋给gbest。6)根据式(3)、式(4)、式(5)来更新粒子的速度和位置。7)当迭代次数达到最大值或最小误差限时,停止迭代,全局极值就是训练过程的最优解,它就是神经网络权值和阈值,否则转到步骤4)执行。
采用上述训练结果,结合一阶线性模型来完成超声波电动机Hammerstein 模型的建模和测试。
2 仿真与测试
2.1 测试数据和参数设置
超声波电动机控制变量主要为两相输入电压频率、幅值和相位。本文的研究对象为USM60 超声波电动机,负载TL=0,本文主要讨论当输入为相位差时的Hammerstein 速度模型。超声波电动机的动态线性部分采用一阶传递函数描述,非线性静态部分采用MPSO-BP 算法来逼近,在BP 神经网络中输入层为一个神经元φ,隐层为3 个神经元,传递函数为logsig,输出层一个神经元ω,传递函数为purelin,神经网络误差限为10-4,迭代次数为1000,超声波电动机输入相位在[-90°,90°]之间每隔10°输入,分别在输入电压频率为41.5 kHz,42 kHz,42.5 kHz情况下输入相位差信号,获得三组数据,将这三组数据作为网络训练样本集。本文中,采用MPSO-BP神经网络建模方法建立Hammerstein 模型静态非线性部分,MPSO 算法的参数设置如下:ωmin=0.1,ωmax=0.9,c1=2,c2=2,r1,r2是[0,1]之间的随机数,粒子群数量为100,粒子速度范围在(0,0.5)之间。
2.2 预测结果和误差分析
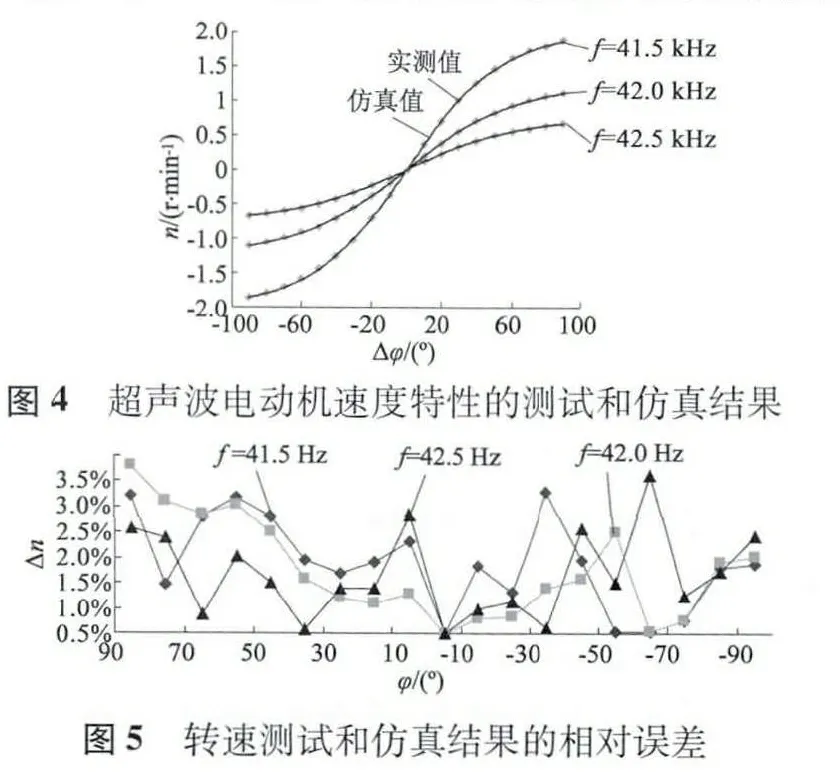
下面给出仿真结果以说明本文给出的方法的意义。驱动电压峰峰值为360 V,驱动频率分别为41.5 kHz,42 kHz 和42.5 kHz,系统输入信号为相位差,输出为速度,测试数据和仿真数据的比较如图4 所示,误差分析如图5 所示。三种情况下,系统的均方误差分别为1.38,0.9,0.45,最大相对误差为2.79%,3.3%,3.14%。可以看出,采用MPSO-BP 神经网络的Hammerstein 模型预测精度更高一些,采用此方法建立的超声波电动机模型可行且实用。
3 结 语
本文采用MPSO-BP 算法建立超声波电动机Hammerstein 模型,其中非线性静态部分采用MPSOBP 神经网络建模,线性动态部分采用一阶传递函数模型。仿真和实验分析结果显示,该方法建立的模型和实验数据较吻合,准确度较高,是复杂非线性系统的一种可行的建模方法,为高性能控制器的设计提供了基础研究。
[1] ZHANG Xin-liang,TAN Yong-hong.Modelling of ultrasonic motor with dead-zone based on Hammerstein model structure[J]. Journal of Zhejiang University:SCIENCE A. 2008,9(1):58-64.
[2] BIGDELI N,HAERI M.Modeling of an ultrasonic motor based on hammerstein model structure[C]//Control,Automation,Robotics and Vision Conference,2004,2(8):1374-1378.
[3] JAHANI M,MOJALLALI H. Neural network based modeling of traveling wave ultrasonic motor using genetic algorithm[C]//International Conference on Computer and Automation Engineering(ICCAE),2010,(5):486-490.
[4] SENJYU T,YOKODA S,GUSHIKEN Y,et al. Position control of ultrasonic motors with adaptive dead-zone compensation[C]//Institute of Electric and Electronic Engineer Industry Applications Conference,33rd IAS Annual Meeting,1998,(1):506-512.
[5] 郭亮,陈维荣,贾俊波,等.基于粒子群算法的BP 神经网络光伏电池建模[J].电工电能新技术,2011,30(2):84-88.
[6] 王建国,阳建宏,云海滨,等.改进粒子群优化神经网络及其在产品质量建模中的应用[J]. 北京科技大学学报,2008,30(10):1188-1193.
[7] 师彪,李郁侠,于新花,等.改进粒子群-BP 神经网络模型的短期电力负荷预测[J].计算机应用,2009,29(4):1036-1039.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17