
资源三号测绘卫星自动云检测
2015-01-11 02:12陈振炜宁津生唐新明
测绘学报 2015年3期
陈振炜,张 过,宁津生,唐新明
1.武汉大学测绘学院,湖北 武汉430079;2.武汉大学测绘遥感信息工程国家重点实验室,湖北 武汉430079;3.国家测绘地理信息局卫星测绘应用中心,北京100830
1 引 言
由于云层覆盖了地表上空50%以上的面积,资源三号测绘卫星的数据在进行传感器校正产品[1]的生产之前,需要剔除云量覆盖过大的影像,以减轻生产负担,提高生产效率;另一方面,估计出影像的云量值,有助于后续的应用。
目前遥感影像的云量检测方法主要有两大类[2]:一类是基于遥感影像的光谱特性[3-6],这种方法主要是利用红外波段,通过分析云和地物在同一个波长上的反射率或亮温值不同,以及云和地物的反射率或亮温值随着波长的变化而变化情况不同,从而进行云地分离。这种方法的云检测效果虽然较好,但是要求影像有足够的波段范围,适用性有限。另一类方法是基于图像处理的手段[7-8],通过分析影像上云和地物的纹理特征,提取合适的特征或特征组合,区分云和地物。这种方法的问题主要在于,遥感影像上云的种类相当繁杂,形态和纹理上没有统一的特征,在各个特征空间内的分布都不集中,而地物的种类也是如此,因此使用纹理特征进行云地区分有较大的难度[10]。文献[11]采用小波SCM 提取纹理特征,并利用基于ASM和熵的双判别方式辨别云层,取得了一定的成果,但受到传感器类型不同、影像分辨率不同等因素的限制,用于资源三号卫星影像时仍存在较高的误判率。
本文研究对象为资源三号测绘卫星原始数据编目处理时所生成的浏览图,尺寸均为1024像素×1024像素。针对云地种类繁杂的问题,首先对待检测的影像进行了增强处理,然后在多尺度空间下分析图像的纹理特征,实现云地的分离。最后选取了993幅浏览图作为待测样本进行试验。
2 资源三号测绘卫星自动云检测
2.1 树判别结构云检测流程
对资源三号测绘卫星编目生成的浏览图采用树状判别结构[12]的方式进行高效率的云量检测,如图1所示。
算法采用了灰度均值、方差、一阶差分、二阶矩等图像特征,经过大量样本的训练获取特征最佳阈值。首先将云图进行分割成64×64的子图块,对于每个子图,根据灰度均值,分为3种情况:灰度均值高于235的子图,图像近乎全白,无明显的纹理和灰度变化,云的概率极高,此时将该子图直接归为云类;对于灰度均值低于80的子图,图像整体表现较暗,地物概率较高,但也可能包含了所占子图面积比例较小的云块,这种情况相当于暗地表上空存在着亮度明显高于地表的云,此时图像会呈现较高的方差值,因此对于灰度均值低于80的子图,若其方差小于所设阈值,则认为是下垫面,反之则说明有云的存在,可根据实际工程进行归类,对于资源三号的实际工程应用,一般将这种情况下的子图归为云,或者可根据灰度值的高低测定子图中云的比例,参与最后的统计;对于灰度均值介于80至235之间的子图,首先对其进行直方图均衡化,以强调其隐含的纹理细节,经过该过程,地物的纹理细节得到强化,而云类由于本身不含较细的纹理,因此变化较小,此时可以结合图像的灰度值和二阶矩进行初步分类,二阶矩的临界取值f0为该子图未经直方图均化时的灰度均值gm的函数,通过大量样本可以粗略确定
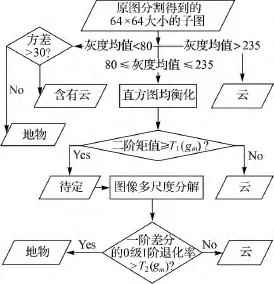
图1 树状判别结构云检测流程Fig.1 Cloud detection workflow with tree discriminate structure

即意味着在较高灰度均值的条件下,云的概率高于地物,则二阶矩的阈值降低。当子图二阶矩高于相应的阈值时,归为云类,否则还有待确定。经过大量样本的试验可以发现,待确定的子图比例约为52%,其中主要为地物,还包括一定比例的云。对于这部分在特征上云地混杂的子图,进行一阶图像尺度分解,并求取分解前后图像的一阶差分退化率,将退化率与子图未经直方图均化的原始灰度均值相结合,通过大量样本训练出退化率临界值d0与灰度均值gm的关系,最终区分云地,此时退化率的临界值仍可以表示为灰度均值的函数

该流程中,灰度均值虽然不能直接作为判别云地的特征,但是贯穿了整个算法流程,起到了重要的参考作用。
2.2 子图切分
在实际工程运用中,云量值作为评价数据质量的一个指标,并不需要很高的精度,因此本文先对待检测的影像进行子图分割,对分割后的小尺寸子图,进行云地分类,即将云目标识别的问题转换为子图的云地分类问题,降低了云检测的复杂程度。然后统计全图中被分为云类的子图所占的比例,即为原图的云量值。同时根据云类子图的分布情况,也能得到影像上云层的大致覆盖区域。
不同的子图尺寸会对云检测的准确性带来一定的影响,若子图的尺寸过大,则包含的信息较多,影像中可能同时含有云类和地物类,或者含有不同类型的云,由于图像的特征是全图的综合反应,此时的子图不能作为一个云类或地物类的单元,且子图尺寸越大时,全图的取样数就越少,会导致准确率受到影响;若子图的尺寸过小,则所含信息量小,不足以体现云和地物的纹理区别,甚至出现部分云和地物的子图表现几乎一致,人眼也难以区分的情况。针对资源三号卫星影像的编目浏览图,本文通过试验后选择尺寸为64×64的大小进行子图分割。
2.3 特征增强和提取
经典的基于纹理分析的云检测算法,主要思路是[8,12-15]:首先对影像进行子图切分,然后提取图像的纹理特征,并采用合适的分类法,对子图进行云和地的区分。传统纹理分析法云检测依赖于提取的特征,在这方面前人已作了大量的工作,如使用分数维描述纹理复杂度和粗糙度[13]、使用灰度梯度共生矩阵描述纹理统计特征[14]等。另外,熵、方差、一阶差分、分数维等反应图像纹理粗细或细节复杂度的特征[8,15]也是经常用于云检测的图像特征。因为一般而言云在图像上的灰度分布均匀、跳变程度小,纹理较粗且模糊。反之,地物的纹理复杂度和灰度跳变程度较大,但是对于本文研究的对象资源三号卫星编目生成的浏览图,其采样率较低,在这个分辨率下,建筑物、道路、植被等地物不可见,仅山脉、河流、沙漠、田野等大面积的地物类型能够呈现在影像上。而这其中有不少的地物类型包括了以下特征:梯度较小、纹理较粗、灰度值较高。这与云类的图像特征相似,容易产生混淆。如沙漠地区的影像往往就有这个现象(图2)。另外,在该分辨率下的云类,尤其是层云以及体积较小的块状云,会呈现出较大的梯度和较细的纹理,甚至是较低的灰度值(图3),加大了直接通过纹理特征来区分云地的难度。

图2 典型的沙地影像Fig.2 Typical sand images

图3 纹理较细的云影像Fig.3 Cloud with thin textures
基于上述考虑,首先对分割后得到的每个子图进行了直方图均衡化的增强处理,以有目的性地改变图像的纹理特征,均衡化通过控制图像灰度级概率密度函数,改变图像的灰度层次,可表示如下[16]

式中,sk为原图灰度值为k的像素经过变换后的新灰度值;T(rk)表示变换函数;pr(ri)是灰度值为i的像素频率;L即图像的灰度等级。
均衡化的目的主要在于突出隐含有纹理细节的图像。由于地物包含着较丰富的纹理信息,其细节清晰度比均衡化之前会有较大提高,如图4和图5所示,沙漠和城市地区的原始影像灰度变化程度小,其中沙地的纹理显得十分平坦,特征类似于云,但经过直方图均化之后,呈现出明显的颗粒感,灰度跳变幅度大,与云类有显著的差异。城市地区经过直方图均化则突出了建筑物等细节。而云类本身不隐含较复杂的细节,因此均化前后的纹理特性变化较小,如图6和图7所示,云类在经过直方图均化后,只有对比度增强,纹理却没有变细,灰度的空间分布仍保持较好连续性。

图4 沙地影像直方图均衡化前后对比Fig.4 Comparison results before-and-after histogram equalization for sand images

图5 城市影像直方图均衡化前后对比Fig.5 Comparison results before-and-after histogram equalization for city images

图6 积云影像直方图均衡化前后对比Fig.6 Comparison results before-and-after histogram equalization for cumulus cloud images

图7 薄云影像直方图均衡化前后对比Fig.7 Comparison results before-and-after histogram equalization for thin cloud images
2.4 多尺度特征分析
对同一事物进行不同尺度的观测,可以得到不同的结果。当遥感影像尺度较大时,主要看到的是地块和海域,在尺度缩小、分辨率随之升高的过程中,山脉、湖泊等地物则显现出来,而当尺度继续缩小之后,则可以看到街道、楼房、树木等细节。相应的,在不同尺度不同分辨率下,图像的特征在会产生变化。经过大量的试验观测可发现:对于某些类型的目标,其图像特征会随图像的尺度变化而发生明显的变化;而对于另外一些类型的目标,则对图像的尺度变化具有较强的鲁棒性,即其特征受图像尺度变化的影响很小。因此,可以考虑通过改变图像分辨率,研究不同目标的各类特征随图像尺度变化而变化的情况,来实现分类的目的。由于单一尺度下的特征空间中的云类和地物存在一定的混杂区域,为了减少误判和漏判,本文将特征的多尺度延拓引入光学遥感影像云量检测的研究,在多尺度下分析图像特征的变化率,通过提取云类和地物在尺度变化情况下图像特征变化的差异,从而进行进一步的云检测算法优化。
首先,通过低通抽样滤波对图像进行多尺度分解,尽管每一级影像都是对上一级的向下采样,但是由于采样之前进行了滤波,因此采样间隔的点对于采样后的图像也有贡献,在一定程度上保留了图像的信息。本文对图像先进行5×5的卷积滤波再进行隔点采样[19]。设第k阶的滤波图像为gk,尺寸为Rk×Ck,则各阶图像有递推公式

式中,需满足归一性、对称性和均匀分布性,在这些条件约束下,此时图像的多尺度分解类似于高斯金字塔分解。
由于云固有的物理特性,在图像尺度不断降低的过程中,云的纹理特性变化不大,而地物由于含有较丰富的细节,随着图像尺度降低,其纹理细节必然会不断损失,且灰度的跳变程度也由于低通滤波的缘故不断变小。这从直观的角度解释了云和地物在图像分解过程中的变化情况是不同的。
从图像特征的层面分析,对于每一级经过分解的影像,都可以提取出前文所述的各种特征,并且这些特征会随着尺度的变化而变化,这个过程称为特征退化,并称某个特征在第k+n级分解图与第k级分解图中的取值之比为该特征的k级n阶退化率

本文利用特征退化率,在多尺度下进行进一步的图像分析,提高了云检测的准确率。
3 试验分析
3.1 特征增强比较试验
以下针对前文所示的图4—图7中4张影像,分析它们在直方图均衡化前后的图像特征变化情况,如表1所示。

表1 几张影像经过直方图均衡化前后的特征变化情况Tab.1 Changes of image feature parameters before-andafter histogram equalization
图8—图11对表1中的数据进行直观展示,形象地体现了图像特征经过直方图均衡化之后的变化情况。
结合表1和图8—图11可以看出,经过直方图均衡化处理之后,一些图像特征发生了明显的变化。而在均衡化处理之前,云和地物的这些特征都没有分离,但经过直方图均衡化之后,在一些图像特征上,图6、图7的云和图4、图5的地物有了极其明显的分离,例如,均衡化之前沙地的一阶差分值最小,为0.755,但经过均衡化之后,增加到41.93;同样城市的一阶差分值经过均衡化也从3.178急剧上升到39.00;相反云类的一阶差分值,虽然也有所增加,但分别只增加到6.34和10.87,尤其是图6的厚云,均衡化前的一阶差分是4组数据中最大的,但均衡化后增量很小,结果远小于沙地和城市两类地物;再比如二阶矩,该特征越小表示纹理越细,经过均衡化之后,两类地物的二阶矩均远小于两类云,还原了地物纹理细的特点;同样,经过均衡化之后,两类地物的惯性矩增量明显,达到8以上,而云类的惯性矩变化则相对较小,均衡化后的惯性矩值均小于1,与地物产生明显差异,由于惯性矩体现了纹理的沟纹深浅,由此可见,经过均化的地物很好地还原了纹理较深的特点。

图8 云地的方差经均衡化前后的变化Fig.8 Variance changes of clouds and grounds before-and-after histogram equalization

图9 云地的一阶差分经均衡化前后的变化Fig.9 First difference changes of clouds and grounds before-and-after histogram equalization

图10 云地的二阶矩经均衡化前后的变化Fig.10 Secondary moment changes of clouds and grounds before-and-after histogram equalization

图11 云地的惯性矩经均衡化前后的变化Fig.11 Inertia moment changes of clouds and grounds before-and-after histogram equalization
通过试验分析可知,直方图均衡化后的子图有以下优点:
(1)增强了部分纹理特征,拉大了云地差距,使两者的混杂区域明显变小。图12和图13比较了195个云类样本和181个地物类样本经过均衡化前后,云和地物在一阶差分特征空间中分布的变化情况。可以看出,经过直方图均衡化之后,云类和地物类在一阶差分这个特征上的分布区域被拉开,地物的一阶差分值整体高于云类。

图12 均衡化前云类和地物类子图的一阶差分值分布情况Fig.12 Distribution of first difference of clouds and grounds before histogram equalization
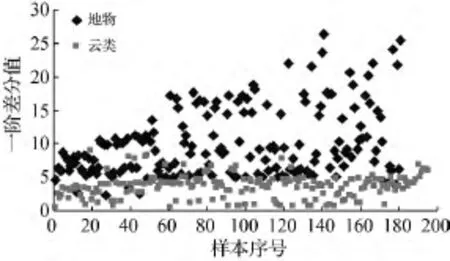
图13 均衡化后云类和地物类子图的一阶差分值分布情况Fig.13 Distribution of first difference of clouds and grounds after histogram equalization
(2)提高了云检测算法的适用性。传统纹理分析法受以下几点因素限制:①受传感器限制,不同传感器的影像可能存在分辨率不同、辐射情况不同等区别,使某些云检测方法只适用于个别传感器,对其他传感器的卫星影像则效果较差;②受产品生产和浏览图生成方式的限制,0级数据或浏览图的重采样方式、色阶压缩变换方式等处理方法不同,使用于云判的影像的图像特征有区别,这也是导致云判算法适用性有限的原因之一。但经过色调均化后,在一定程度上统一了图像,使云检测算法的适用性得到提高。
(3)有利于薄云的检测。薄云由于具有一定的透明性,一直是云检测的难点。首先其透明性导致图像特征值往往介于云类和地物类之间,容易误判;其次,对于透明度较高的薄云,可以看见其下垫面,往往归为地物,而透明度较低的薄云,下垫面模糊不清,则一般归为云类,这为薄云的检测增加了复杂性。通过直方图均衡化的图像,薄云的存在被强化,且对于透明度高的薄云,其下垫面的纹理会得到一定程度的恢复,而对于透明度低的薄云,则呈现出云的形态。如图14所示,经过直方图均衡化后,薄云透明度高的区域,地物的纹理得到了较好的还原,而薄云透明度低的区域,则呈现出云的形态,这就便于薄云的检测。

图14 薄云影像均衡化前(a)后(b)对比Fig.14 Comparison of thin cloud images before(a)-and-after(b)histogram equalization
对子图进行直方图均化处理是资源三号测绘卫星编目浏览图云检测中最关键的步骤之一。通过这一处理,可以使错综复杂的云类和地物类的区分工作得到极大的简化,不仅提高了计算效率,也提高了分类结果的准确率。
本文选取了195个云类子图样本和181个地物类子图样本,经过直方图均衡化预处理之后,其中一阶差分值分布如前文图13所示。可以看出,云类样本在经过直方图均衡化之后的一阶差分值主要分布在0~5之间,而地物样本则分布在5~30之间,说明经过直方图均衡化后,图像的一阶差分值能够较好地体现云地特性,在一定程度上起到云地区分的作用,但在一阶差分值为5的上下区域,仍有不少云类和地物混合在一起,因此仅靠一阶差分并不能准确地区分云地。
另外,图15和图16分别反映了经过直方图均衡化处理后样本中,云地的二阶矩和惯性矩分布情况。由图15可以看出,二阶矩具有良好的云地区分能力,经过直方图均衡化之后的大多数云的二阶矩值均小于地物。但仍有约10%的云类和地物混杂在一起。而图16中反映出惯性矩也具有一定的区分云地的能力,但效果远不如二阶矩,因为地物的惯性矩值分布很不集中,广泛地分布在0~4之间,而云类的惯性矩值普遍较低,但也有一定比例的云具有较高的惯性矩值。从图像的整体角度上看,说明地物的图像既有较深的沟纹,也有较浅的沟纹,图像从清晰到模糊均有;而云类的图像沟纹普遍较浅,灰度变化较缓且小,效果模糊,但也存在一部分云图具有较深的沟纹和较清晰的效果。
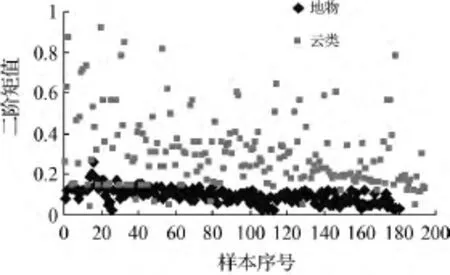
图15 云和地物的二阶矩值分布图Fig.15 Distribution of secondary moment of clouds and grounds

图16 云和地物的惯性矩值分布图Fig.16 Distribution of inertia moment of clouds and grounds
3.2 多尺度特征提取试验
灰度均值对尺度的变化具有很强的鲁棒性,图像分解的过程中灰度均值变化很小;而一阶差分在图像分解中呈现出较大的变异性,且该特征的退化率与云地分类具有较高的契合度。本文选取了在单一尺度下误判的云地样本各50张,图17为这些样本的一阶差分特征的0级1阶退化率分布情况。可以看出,通过多尺度的分析,可以进一步改善云检测效果。
3.3 云检测综合试验
为了验证该云检测算法,本文选取了多幅不同资源三号测绘卫星编目浏览图进行试验。

图17 云和地物的一阶差分0级1阶退化率分布情况Fig.17 First-order degeneration distribution of first difference of clouds and grounds of level 0images
图18(a)为一幅云含量约为60%的遥感影像,影像上的云灰度大多在145~210之间,地物的灰度值大多在70~185之间,图上包含了层云和薄云,云与地物没有明显的分界。根据本文的云检测算法进行处理,得到检测结果如图18(b)所示。其中黑色部分为灰度均值低于80的子图,由于在这个灰度水平下,云的概率极低,因此可以直接认为是地物。白色部分代表了检测出来的云,其余部分为地物,计算得到云量比例为57.13%,符合预期结果。

图18 原始影像(a)和检测结果示意图(b)Fig.18 Original image(a)and result image(b)
为了分析特征多尺度延拓对云量检测效果的影响,试验选取了一幅包含了层云、卷云和积云的遥感影像,如图19(a)所示。该图的云含量为100%,在实际生产中,一般视为废片。对该图在单一尺度下进行特征分析,检测出属于云类的子图,如图19(b)所示,灰色区域为在这一步尚未检测出云的子块。这部分子块内的影像,沟纹较细,纹理复杂度较高,和地物存在一定的相似性,这体现了单一尺度下特征分析的局限性。对该图进行特征的多尺度分析,即求取一阶差分在各个子图经过分解之后的0级1阶退化率,灰色区域为通过征多尺度延拓分析后所检测出来的云子图,经过图像的多尺度分析,云检测的效果得到了很大的提升。

图19 原始影像(a)和多尺度检测结果(b)Fig.19 Original image(a)and result image in multi-scale(b)
为了进一步验证算法对薄云的检测能力,试验选取了两张含有大量薄云的影像,其中图20(a)中的薄云绝大部分不具备透明性,其下垫面已模糊不清,只有陆地和水域的交界还依稀可见;而图20(b)的薄云透明程度不均匀,其透明的部分可以看到地面信息,尤其是对于传感器校正产品[1],具有远高于相应缩略图的分辨率,能够通过去云的方式还原下垫面的影像,基于这点考虑,当云的透明度高到一定程度时,可归为地物类,以减少不必要的数据浪费。

图20 均匀薄云(a)和不均匀薄云(b)Fig.20 Uniformly thin clouds and non-uniformly thin clouds
对图20使用本文的检测算法进行云检测,得到结果如图21所示,同样白色部分代表云子图。图21(a)所计算出的云量值为94.34%,而图21(b)所计算得到的云量值为62.11%,均基本与预期相符。
另外,本文选取了993幅资源三号测绘卫星编目生成的浏览图作为试验待测样本,通过人工目视给定云量值,然后根据所提出的云量检测算法计算所有图中所含云量。待测样本的总数据量为160MB,总计算时间为74s,平均每副影像检测时间为0.075s。对于实际工程应用而言,通常评价云量自动检测效果的指标并非检测精度,而是检测结果的准确率。若设定与人工结果相差±5%以内为准确,否则为不准确,则符合准确条件的影像个数为852幅,准确率为85.80%;若设定与人工结果相差±10%以内为准确,则符合准确条件的影像个数为931幅,准确率为93.76%。
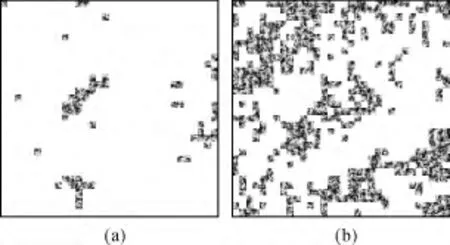
图21 均匀(a)和不均匀(b)薄云检测结果Fig.21 Result image of uniformly thin clouds(a),result image of non-uniformly thin clouds(b)
4 结 论
本文对资源三号测绘卫星编目浏览图的云量检测进行了分析,对待检测的影像进行子图分割,将子图作为云量检测的基本单元,把云目标识别问题转化为子图的云地分类问题。在使用图像特征进行分类之前,采用直方图均衡化对原影像进行预处理,以突出地物的纹理细节,解决了传统的纹理分析方法进行云量检测时所面临的云地在各个特征空间中分布不集中且混杂程度高的问题,分析并提取了灰度均值、方差、一阶差分、二阶矩等图像特征作为云地分类的有效特征,并对图像特征进行多尺度延拓分析,将特征退化率与云地分类相结合,采用树状判别结构的方式进行云量检测。试验结果表明,云检测算法达到了较高的检测准确率。
[1] PAN Hongbo,ZHANG Guo,TANG Xinming,et al.The Geometrical Model of Sensor Corrected Products for ZY-3Satellite[J].Acta Geodaetica et Cartographica Sinica,2013,42(4):516-522.(潘红播,张过,唐新明,等.资源三号测绘卫星传感器校正产品几何模型[J].测绘学报,2013,42(4):516-522.)
[2] HARUMA I,TAKASHI Y N.Development of an Unbiased Cloud Detection Algorithm for a Spaceborne Multispectral Imager[J].Journal of Geophysical Research-Atmospheres,2009.DOI:10.1029/2008JD010710.
[3] YANG Tieli,HE Quanjun.Cloud Detection in MODIS Data[J].Journal of Anshan University of Science and Technology,2006(2):162-166.(杨铁利,何全军.MODIS数据的云检测处理[J].鞍山科技大学学报,2006(2):162-166.)
[4] PASQUALE L S,MICHELLE A B,JOHN L D.Devel-opment of the Landsat Data Continuity Mission Cloud-Cover Assessment Algorithms[J].IEEE Transactions on Geoscience and Remote Sensing,2012,50(4):1140-1154.
[5] PAN Cong,XIA Bin,CHEN Yu,et al.Cloud Detection of MODIS Data Based on FCM[J].Microcomputer Information,2009(4):124-125,131.(潘聪,夏斌,陈彧,等.基于模糊聚类的MODIS云检测算法研究[J].微计算机信息,2009(4):124-125,131.)
[6] GUO Hongtao,WANG Yi,LIU Xiangpei,et al.Integrated Optimal Method of Cloud Detection with Meteorological Satellite Data[J].Journal of PLA University of Science and Technology(Natural Science Edition),2010,11(2):221-227.(郭洪涛,王毅,刘向培,等.卫星云图云检测的一种综合优化方法[J].解放军理工大学学报(自然科学版),2010,11(2):221-227.)
[7] YAN Yusong,LONG Teng.Real-Time Cloud Detection in Optical Remote Sensing Image[J].Transactions of Beijing Institute of Technology,2010,30(7):817-821.(闫宇松,龙腾.遥感图像的实时云判技术[J].北京理工大学学报,2010,30(7):817-821.)
[8] ZHOU Quan.The Classification of Remote Sensing Cloud Images Based on Multiscale Features[D].Hefei:University of Science and Technology of China,2010.(周全.基于多尺度特征的遥感云图分类[D].合肥:中国科学技术大学,2010.)
[9] ZHOU Lijuan.Cloud Detection Algorithm Research For Optical Satellite Image[D].Xi’an:XiDian University,2012.(周丽娟.可见光卫星图像的云检测算法研究[D].西安:西安电子科技大学,2012.)
[10] CHEN P Y,SRINIVASAN R,FEDOSEJEVS G,et al.An Automated Cloud Detection Method for Daily NOAA-14AVHRR Data for Texas,USA[J].Remote Sensing,2002,23(15):2939-2950.
[11] TAO Shuping,JIN Guang,ZHANG Guixiang,et al.A Wavelet SCM Algorithm Used to Detect Cloud in Remote Sensing Cameras[J].Acta Geodaetica et Cartographica Sinica,2011,40(5):598-603.(陶淑苹,金光,张贵祥,等.实现遥感相机自主辨云的小波SCM算法[J].测绘学报,2011,40(5):598-603.)
[12] SHEN Na,ZHENG Tianyao,WANG Zhensong.High-speed and High-accuracy Algorithm for Cloud Detection and Its Application[J].Journal of Remote Sensing,2009,13(6):1138-1155.
[13] XIA Deshen,JIN Sheng,WANG Jian.Fractal Dimension and GGCM Based Meteorology Cloud Pictures Recognition-Description of Texture Complexity and Roughness by Fractal Dimension(Ⅰ)[J].Journal of Nanjing University of Science and Technology,1999,23(3):90-93.(夏德深,金盛,王健.基于分数维与灰度梯度共生矩阵的气象云图识别(Ⅰ)——分数维对纹理复杂度和粗糙度的描述[J].南京理工大学学报,1999,23(3):90-93.)
[14] XIA Deshen,JIN Sheng,WANG Jian.Fractal Dimension and GGCM Based Meteorology Cloud Pictures Recognition-Description of Texture Statistical Characteristics by Gray Level-gradient Co-occurrence Matrix(Ⅱ)[J].Journal of Nanjing University of Science and Technology,1999,23(4):289-292.(夏德深,金盛,王健.基于分数维与灰度梯度共生矩阵的气象云图识别(Ⅱ)——灰度梯度共生矩阵对纹理统计特征的描述[J].南京理工大学学报,1999,23(4):289-292.)
[15] CHEN Peng,ZHANG Rong,LIU Zhengkai.Feature Detection for Cloud Classification in Remote Sensing Images[J].Journal of University of Science and Technology of China,2009(5):484-488.(陈鹏,张荣,刘政凯.遥感图像云图识别中的特征提取[J].中国科学技术大学学报,2009(5):484-488.)
[16] GONZALEZ C R.Digital Image Processing[M].2nd ed.Beijing:Electronic Industry Press,2008:72-74.(冈萨雷斯.数字图像处理[M].第2版.北京:电子工业出版社,2008:72-74.)
[17] WALKER R F,JACKWAY P T,LONGSTAFF I D.Recent Developments in the Use of the Co-occurrence Matrix for Texture Recognition[C]∥Proceedings of 13th International Conference on Digital Image Processing.[S.l.]:IEEE,1997:63-65.
[18] FENG Jianhui,YANG Yujing.Study of Texture Images Extraction Based on Gray Level Co-occurence Matrix[J].Beijing Surveying and Mapping,2007(3):19-22.(冯建辉,杨玉静.基于灰度共生矩阵提取纹理特征图像的研究[J].北京测绘,2007(3):19-22.)
[19] ZHOU Quan,ZHANG Rong,YIN Dong.The Extracting of Multiscale Features of Remote Sensing Cloud Images Based on Gaussian Pyramid[J].Remote Sensing Technology and Application,2010(5):604-608.(周全,张荣,尹东.基于高斯金字塔的遥感云图多尺度特征提取[J].遥感技术与应用,2010(5):604-608.)
[20] JIA Yonghong.Digital Image Processing[M].Wuhan:Wuhan University Press,2003:182-184.(贾永红.数字图像处理[M].武汉:武汉大学出版社,2003:182-184.)
猜你喜欢
软件(2020年3期)2020-04-20
同济大学学报(自然科学版)(2019年2期)2019-04-02
计算机与数字工程(2019年3期)2019-03-26
摄影之友(影像视觉)(2018年12期)2019-01-28
佳木斯大学学报(自然科学版)(2018年6期)2018-12-27
西华师范大学学报(自然科学版)(2018年3期)2018-09-26
Coco薇(2017年8期)2017-08-03
现代电子技术(2016年15期)2016-12-01
电子科技大学学报(2016年2期)2016-08-31
Coco薇(2015年5期)2016-03-29
