现代有轨电车信号系统设计研究
2015-01-11 05:51:17高桂桂
城市轨道交通研究 2015年1期
高桂桂
(北京城建设计发展集团股份有限公司,100037,北京∥高级工程师)
现代有轨电车信号系统设计研究
高桂桂
(北京城建设计发展集团股份有限公司,100037,北京∥高级工程师)
提出了确定有轨电车列控方式的原则和影响因素。针对车载遥控道岔方案存在的安全隐患提出了改进方案,设计了联锁控制方案;对三种道岔控制方案进行分析并给出了适用条件。提出了GPS(全球定位系统)定位结合无线通信的列车定位方案,与计轴方案进行了技术分析和比较。结合北京现代有轨电车西郊线进行信号系统设计,确定了司机人工控制方式,给出了联锁集中控制方案及GPS结合无线通信的列车定位方案;针对地下隧道提出了应用航位推算技术的解决方案。
现代有轨电车;信号系统;道岔控制;列车定位
Author's addressBeijing Urban Construction Design&Development Group Co.,Ltd.,100037,Beijing,China
现代有轨电车于20世纪90年代后期在多个西欧国家成功建设运营,其崭新的形象、舒适的服务迅速吸引了国内城市的关注和研究[1]。继大连、天津、上海成功运营有轨电车之后,我国众多城市也在积极规划和建设,沈阳浑南新区有轨电车工程已于2013年10月正式建成通车。现代有轨电车是在传统有轨电车的基础上全面改造升级的一种先进的公共交通方式,具有客运能力大、速度高、弹性灵活、舒适新颖的特点[1]。
随着现代有轨电车(以下简称“有轨电车”)服务水平的不断提升,对行车安全和效率也有了更高的需求。有轨电车信号系统的设计既不能照搬传统有轨电车模式,又与城市轨道交通中信号系统的设计差别明显。因此,对适用于有轨电车的信号系统进行探讨、总结实践经验,具有重要意义。
本文针对有轨电车信号系统设计中的难点和关键问题进行分析,并以北京现代有轨电车西郊线信号系统设计为例,给出了系统功能、构成及关键技术方案。
1 列车控制方式的选择
城市轨道交通中采用基于设备控制的信号系统实现全线列车的高效运行和安全防护;而传统的有轨电车为司机人工控制列车,信号设备仅控制道岔。有轨电车适用的列车控制方式,需结合有轨电车的特点确定。
(1)行车需求是确定列车控制方式的依据。传统的有轨电车速度低、间隔大、列车质量小,司机发现前方有车后制动,可保证安全停车。有轨电车质量大,随着行车需求的提高,以人的能力控制车将越发困难,因此列控方式应根据行车需求,结合列车质量、制动性能、线路坡度等数据计算确定。
(2)列车控制方式的选择应基于线路环境条件。城市轨道交通中信号系统实施自动控制的前提是列车行驶在封闭的环境中,而有轨电车往往行驶于城市道路上,受各种不确定因素的影响,不利于设备实施控制。
(3)列车控制方式与平交路口控制方式密切相关。道口控制在平交路口设物理隔离设施,具备设备控制的可能,但是对垂直方向交通流影响很大,且需有人值守。有轨电车按公共交通灯的显示行车,在路口面临复杂、不确定的环境,更适合采用司机人工控制。
(4)列车控制方式受轨旁设备设置、线路景观需求的影响。有轨电车行驶在城市道路上,不宜设置轨旁设备。轨旁设备除影响景观外,还面临开放环境中轨旁设备的安装、抗干扰、防盗等一系列问题。司机人工控制意味着系统的简化和轨旁设备的减少,更适合有轨电车工程。
(5)基于故障-安全理念设计的设备控制方式,比人工控制具有更好的安全性,也使工程整体的自动化水平显著提升。
(6)人工控制所需的信号系统简单、设备少,相对于基于设备控制的信号系统,可大幅降低系统投资。
综上所述,列车控制方式受多种因素影响,应结合具体工程的特点和功能需求确定。行车需求低的工程适合司机人工控制方式;行车需求高的工程须采用列车自动控制方式实现安全防护,并尽量创造封闭的线路环境,通过立交的方式减少平交路口,为信号系统提供实施自动控制的条件。总之,有轨电车工程应是一个各专业设计方案互相匹配的系统工程,需根据实际情况确定适用的列车控制方式。
2 道岔控制方案
在采用人工控制方式的有轨电车工程中,对道岔的控制和安全防护成为信号系统的主要设计内容,可选择传统有轨电车常用的车载遥控道岔方案或轨道交通使用的联锁控制方案。
2.1 车载遥控道岔方案
2.1.1 传统的车载遥控道岔
传统的有轨电车采用车载遥控道岔,列车行驶至道岔附近,司机通过车载按钮遥控道岔转动。较先进的车载遥控道岔系统设有与转辙机联动的信号机,司机根据信号行车,可避免挤岔事故发生。
但是,该方式仍然存在较多的安全隐患。例如,在一列车通过道岔还没有完全出清的情况下,若另一列车遥控道岔转动,将造成前一列车掉道。
2.1.2 改进的车载遥控道岔方案
为解决上述列车争抢道岔控制权带来的安全隐患,可对方案做如下改进:在道岔岔前和岔后定位、反位分别安装无源电子标签,车载设备读取电子标签信息时即表示列车已进入该道岔控制区域(见图1);车载设备向地面设备请求道岔的控制权,地面设备把控制权授予某列车后,相应道岔即被该车锁定,不再受其它列车的控制;司机通过车载按钮遥控道岔转动,道岔自动检查锁闭、信号机开放;列车通过道岔后读取道岔另一端的电子标签,即表示已驶出道岔控制区域,车载设备向地面设备发送信息释放控制权。
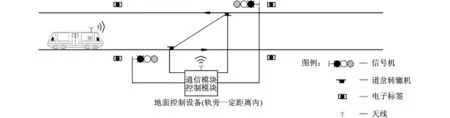
图1 车载遥控道岔方案示意
该方案的轨旁设备除了转辙机和信号机外,增加了无源电子标签和地面控制设备、通信设备。电子标签可结合有轨电车牵引供电电线杆安装,地面控制设备可离开轨道一定距离(根据线缆选型和信号衰耗情况确定)选择适当的位置安装。
2.2 联锁集中控制方案
联锁是通过技术方法,使信号、道岔和进路必须按照一定程序并满足一定条件,才能动作或建立起来的相互关系[2]。
联锁方案是采用计算机联锁系统对道岔进行集中控制。由于有轨电车工程正线道岔较少,道岔主要用于列车端站折返和出入段,因此,可采用中心自动办理进路方式,特殊情况下转为控制中心调度员人工办理。如图2所示,在道岔前设进路触发区段,列车进入进路触发区段后,系统进行联锁关系照查,自动办理进路,锁闭道岔、开放信号;列车出清道岔区段后,系统自动解锁。

图2 联锁集中控制方案原理示意图
该方案增加了较多的轨旁计轴设备,且控制设备复杂、数量多。
2.3 方案适用性分析
3种道岔控制方案的比较及适用条件如表1所示。

表1 道岔控制方案性能比较
综上所述,车载遥控道岔方案适用于行车速度低、间隔大、列车制动性能好、对折返效率要求不高的有轨电车工程;行车速度高、间隔小、折返效率和安全需求高的有轨电车工程,应考虑采用联锁控制方案。
3 列车定位方案
有轨电车工程如对列车调度监视有需求,则获取列车实时定位数据是实现此功能的关键。可选择GPS(全球定位系统)定位结合无线通信和基于计轴的列车检测方案。
3.1 GPS定位结合无线通信方案
该方案在快速公交(BRT)和出租车等交通方式中广泛应用。系统通过GPS车载终端获得列车位置、速度等数据,通过无线通信将数据实时传输至控制中心。无线通信方案可利用有轨电车工程通信系统组建的无线网络,如不具备该条件,可采用租用公网方案。租用公网可选择GSM(全球移动通信系统)、GPRS(通用分组无线服务)或CDMA(码分多址通信)等通信技术。
3.2 基于计轴的列车检测方案
计轴是轨道交通中常用的检测轨道区段内列车占用/出清的设备。根据闭塞分区的划分,在分界点设计轴检测列车通过该点的车轴数,通过比较相邻两个计轴点的车轴数,得到两个计轴点之间(即轨道区段内)的列车占用/出清情况,从而得到列车所在的区段。这种应用建立在一个轨道区段内只允许有一列车的基础上。如果运营上允许多列车进入一个轨道区段,这时计轴执行更复杂的功能,需对计轴软件进行开发。
由于计轴是基于区段检测列车而不是单点定位,因此只能显示列车在某个区段内,而不能显示列车在区段内的具体位置和速度。另外,计轴只能检测列车,不能实现列车的识别,虽可以从软件上为线路上运行的列车分别赋予车次号,但不能识别具体为某列车。需增加列车识别设备,如射频设备实现此功能。
3.3 方案分析
GPS定位结合无线通信方案在公共交通领域应用广泛。GPS技术成熟,无线通信如能利用本工程通信系统的无线网络,则系统简单、投资低。该方案存在GPS信号遮挡、无线通信延迟等问题,但是由于定位数据仅用于调度监视,不涉及安全,对功能实现影响不大,因此,本方案非常适用于有轨电车。如果本工程没有无线网络,则需租用公网,增加了运营费用。
计轴检测方案中信息均采用有线方式传输,可靠性、实时性好,但系统复杂、投资高、轨旁设备多、维护工作量大,适合在不具备无线通信条件的情况下使用。需要注意的是,计轴方案在工程初期建设了基础信号设备,利于将来升级为信号系统。
4 北京西郊线实例分析
北京现代有轨电车西郊线是连接主城区和香山风景区的旅游观光线路,全长9 041 m,包括地下线、高架线、地面线三种形式,全线设车站7座,车辆段1座。线路位于道路中间的绿化带内,轨面与轨旁绿化平齐,设计行车速度25 km/h,发车间隔4 min,存在多处平交路口。
4.1 信号系统功能
西郊线线路环境开放,平交路口采用公共交通灯控制。由于对周边景观要求高,且选定的有轨电车具有很好的加速和制动性能,可由司机驾驶保证安全,故列车采用司机人工控制方式。
基于以人为主导的列车控制方式,信号系统设计以满足功能需求、简化系统配置为原则,功能定位为道岔控制和调度管理。
4.2 系统方案
西郊线信号系统由正线道岔控制系统、车辆段道岔控制系统和调度管理系统构成。
4.2.1 正线道岔控制方案
西郊线作为北京第一个现代有轨电车工程,整体定位高,相对于传统有轨电车具有行车速度高、折返间隔小、对行车效率和安全需求高等特点,因此正线道岔采用联锁控制方案。
在道岔区段设计轴,对道岔进行联锁集中控制;设进路触发区段,控制中心自动办理进路,可转为人工办理;在正线联锁站设应急盘,中心设备或通道故障以及运行需要时转为车站人工控制。
由于西郊线轨顶与轨旁草坪平齐,选用可埋入地下安装的转辙机,并预埋地下排水管路。为防止道岔转动伤人,道岔区域采用绿化等方式进行局部封闭处理。
4.2.2 车辆段道岔控制方案
车辆段的作业方式主要是车辆的进、出段和段内的调车作业。基于车辆段道岔多、作业复杂、站场封闭的特点,为保证发车和调车效率,道岔采用联锁集中控制方案,列车检测设备采用计轴。
4.2.3 地下段列车定位方案
本工程采用GPS定位结合无线通信方案。西郊线的设计难点在于存在地下段,隧道内GPS无法接收数据。本方案利用航位推算技术解决地下段列车定位问题。
航位推算(Dead-Reckoning,简为DR)是一种常用的自主式导航定位手段,其基本原理是从一个已知的坐标位置和方向开始,根据车辆在该点的航向、航速和时间来推算下一时刻的坐标位置[3],如图3所示。由图3可得航位推算法的基本计算公式为:

图3 航位推算原理示意图

式中:
d Rn-1,dθn——分别为物体从n-1时刻的位置(Xn-1,Yn-1)到n时刻位置(Xn,Yn)的位移变化矢量和航向变化量。
由于航位推算的固有缺陷,如里程计误差、航向角误差等,单一的航位推算系统在实际定位过程中不可避免地会出现误差,且里程误差将随着时间不断地累加。该过程可用下式表示:

式中:
ΔSn——n时刻列车运行距离的累计误差;
Δθn——n-1至n时刻列车航向信息累计误差;
T——传感器采样间隔;
t1,t2,…,tn——传感器采样时间点。
在有轨电车工程中,钢轨是固定的,通过在车载设备上装载线路数据(车载电子地图),可得到任意点列车的运行方向(即θn已知),且是准确的、不含误差的。以GPS信号失去锁闭状态前的位置为基点,通过电子地图获得列车运行方向,通过速度数据计算失去锁闭状态后列车行走的里程,即可推算出列车的瞬时位置。这里可能存在里程数据的误差,但通过采用高精度的速度传感器,可有效控制纵向误差。西郊线地下隧道均在500 m以内,且列车定位数据仅做调度监视使用,不涉及安全功能,因此航位推算产生的误差对系统应用影响不大。
在地下隧道较长或对定位精度要求高的工程中,可在隧道内装设应答器,车载电子地图包含应答器所在位置的准确里程,可对航位推算产生的误差进行修正,有效控制累计误差。如图4所示。
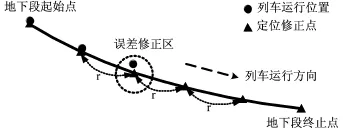
图4 航位推算误差修正示意图
上述方案适用于地下隧道内没有道岔的情况,否则,道岔上列车的运行方向是不确定的,需设置方向传感器(角速度陀螺仪)。另外,由于本工程线路设于道路旁绿化带内,采用GPS结合航位推算的定位方案也可有效解决GPS信号受树木遮挡的问题。
5 结论
(1)有轨电车工程应是一个各专业设计方案互相匹配的系统工程。列车控制方式应考虑行车需求、环境条件、平交路口、景观需求等因素,结合实际工程特点确定。
(2)车载遥控道岔方案适用于行车速度低、间隔大、列车制动性能好、景观要求高、对折返效率要求不高的有轨电车工程;反之,应考虑联锁控制方案。
(3)GPS定位结合无线通信方案可为有轨电车工程提供列车定位数据,实现不涉及安全的功能。地下隧道内列车定位及地面线GPS信号遮挡问题可通过GPS结合航位推算的方法解决。
[1] 薛美根,杨立峰,程杰.现代有轨电车主要特征与国内外发展研究[J].城市交通,2008,6(6):88.
[2] TB 454—1981铁路信号名词术语[S].
[3] 王慧青,王庆.车载航位推算系统中传感器参数的在线标定[J].测绘技术,2008(12):21.
[4] 刘新平.新型有轨电车信号系统方案研究[J].城市轨道交通研究,2012(5):50.
On the Signal System Design in Modern Tramcar Project
Gao Guigui
Principles and impact factors in the selection of train control mode are proposed.Based on the hidden risks,the improvement plans for the on-board remote control of railway switch and interlocking control scheme are designed,the application conditions are summarized after a thorough comparison of three switch control schemes.A train location method that combines wireless communication with GPSpositioning method is put forward and compared with the axle counter method for a detailed technical analysis.The manual train control mode and interlocking control are determined in the signaling system design according to the features of the modern tramcar project in Beijing West suburb.Finally,the dead reckoning technology is recommended in underground tunnel conditions.
modern tramcar;signal system;switch control;train positioning
U 282+.2:U 482.1
10.16037/j.1007-869x.2015.01.016
2013-04-25)
猜你喜欢
铁道通信信号(2020年1期)2020-09-21 08:55:18
铁道通信信号(2020年12期)2020-03-29 06:21:56
铁道通信信号(2020年11期)2020-02-07 01:02:06
铁道通信信号(2020年10期)2020-02-07 01:01:02
铁道通信信号(2019年3期)2019-04-25 03:00:40
铁道通信信号(2018年12期)2019-01-31 05:36:46
铁道通信信号(2018年10期)2018-12-06 09:35:08
铁道通信信号(2018年10期)2018-12-06 09:34:48
铁道通信信号(2018年7期)2018-08-29 01:17:06
铁道通信信号(2016年11期)2016-06-01 12:11:22