
基于Matlab的无刷直流电机控制系统仿真研究
2015-01-06 06:28谢少华瞿遂春
新型工业化 2015年3期
谢少华,瞿遂春
(湖南工业大学电气与信息工程学院,湖南 株洲 412007)
基于Matlab的无刷直流电机控制系统仿真研究
谢少华,瞿遂春
(湖南工业大学电气与信息工程学院,湖南 株洲 412007)
本文在分析无刷直流电机运行原理的基础上,提出了一种基于Matlab建模的新方法,即通过Matlab中原有的同步电机模型,改变其反相电动势参数,然后在外部搭建位置检测与换相电路,可以方便快捷的构成无刷直流电机控制系统仿真模型。并对控制系统仿真模型各个部分的建模进行介绍,同时,将仿真结果与实验结果进行对比。对比结果表明,仿真结果与实验结果基本一致,在Matlab中建模的新方法能够正确反映无刷直流电机控制系统性能,对实际控制系统设计与调试提供重要依据。
无刷直流电机; 建模;系统仿真
0 引言
无刷直流电机一般采用高性能的永磁铁励磁,具有高的功率重量比,结构简单,调速性能优越等特点[1,2]。随着永磁材料与电力电子技术的不断发展,无刷直流电机应用越来越广泛。
在当今竞争日益激烈的电机市场,产品更新换代加速,对于一个企业来说,如何在工业生产中,快速准确开发电机控制系统提出了更高的要求,对于一个完整的控制系统来说,涉及参数很多,如何快速方便的测试电机控制系统性能是一个关键问题。本文提出通过在Matlab软件中对系统建模仿真,实现快速方便的测试,可以缩短企业开发周期与降低成本。
在Matlab中的无刷直流电机控制系统建模,大多数都是通过无刷直流电机的电压方程、磁链方程、运动方程等编写函数,然后通过这些函数来搭建模型[3,4]。这种方式建模繁琐,过程复杂,本文在分析无刷直流电机运行原理的基础上,提出了一种新的建模方式,即基于Matlab中原有的同步电机模型,通过改变反向电动势的参数,然后在外部构建位置检测与换相电路,可以很方便快捷的构成无刷直流电机控制系统模型。同时,对所搭建的模型进行仿真,将仿真结果与实测结果进行对比,对比结果表明,仿真结果与实测结果基本一致。该仿真建模方式能够正确反映控制系统性能。
1 无刷直流电机电机数学模型与控制系统组成
无刷直流电机本质上为自控同步运转的同步电机,其数学模型分析与建立可以借鉴同步电动机的分析方法[5]。依据无刷直流电机最常用的工作方式,三相六状态导通方式,分析无刷直流电机的数学模型。
分析时对无刷直流电机作如下假设:
1、三相绕组完全对称,定子电流、转子磁场呈对称分布;
2、忽略转子转速波动对电机的影响;
3、电枢绕组在定子槽内均匀连续分布;
4、不考虑功率开关管的压降对电机的影响。
在上述理想条件下,可得电压方程,方程如下

其中:uA、uB、uC为定子相绕组电压(V);
iA、iB、iC为定子相绕组电流(A);
eA、eB、eC为定子相绕组电动势(V);
R为电机相电阻;
L为每相绕组的自感(H);
M为每两相绕组间的互感(H);
p为微分算子,p=d/dt ;
根据上述分析,等效电路如图1所示。
以电子换相代替机械换相的无刷直流电机控制系统基本结构:无刷电机本体、电子开关电路(逆变器)、转子位置传感器、控制器四部分,其框图如图2所示。
工作原理:通过位置传感器获得正确的位置信号,并根据信号进行逻辑换相,产生换相信号,将产生的换相信号传送到控制器中,然后通过控制器内部运算,输出换相信号,信号经过放大,驱动逆变器工作,同时,在气隙中生成旋转磁场,通过转子磁场与旋转磁场的相互作用,无刷直流电机转子就将沿一定方向持续运转。

图1 无刷直流电动机等效电路Fig. 1 Equivalent circuit of Brushless DC motor
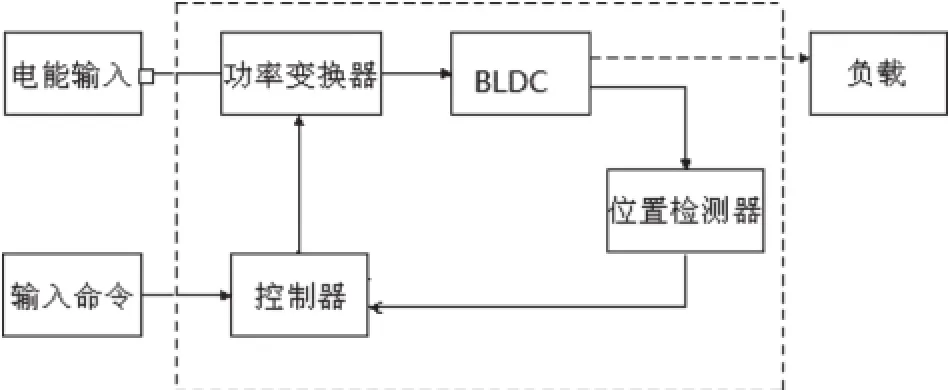
图2 BLDC控制系统框图Fig. 2 The block diagram of the BLDC control system
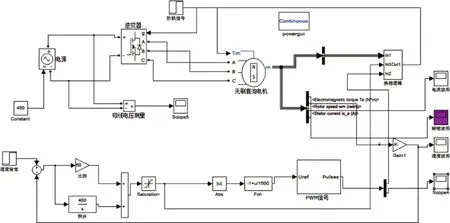
图3 无刷直流电机控制系统仿真模型Fig. 3 Brushless DC motor control system simulation model
2 无刷直流电机控制系统在Matlab的建模
无刷直流电机控制系统模型主要由无刷直流电机本体模块,逆变器模块,电源模块,闭环的PI控制器模块。系统的仿真模型图如图3所示。
2.1 无刷直流电机本体模型的建立
利用Matlab建立无刷直流电机本体模型,建模过程如下(1) 创建新的项目,并保存好,选择永磁同步电机模型 ;
(2)在永磁同步电机模型中,设置反电动势为120,并设置好相关参数;
(3) 由于无刷直流电机需要通过位置传感器获得准确的换相信息才能顺利运行,所以需要设置位置传感器与换相模块;具体结构如图4所示。
2.2 逆变器及电源模块的建立
无刷直流电机功率变换器有多种电路结构,本文采用的是单电源供电方式,工作原理简单,采用三相桥式逆变器结构,然后直接驱动电机,由于无刷直流电机的运行必须依赖于动子位置信号检测,从而为三相电流提供正确的换相信息。逆变器的触发信号由位置检测信号与速度给定信号共同决定。电源模块为恒定电压源,根据电机额定参数,幅值为480V。
2.3 PI闭环控制模块
本文的仿真控制系统采用单速度闭环控制系统,调节方式为PI调节,主要包括速度给定环节,比例环节,积分环节,PWM信号生成环节,根据速度反馈信号与预设的速度给定值的差值,通过PI控制,实现速度的闭环控制。根据PI参数设置基本方法[6-10],结合参数设定对系统影响,(1)比例系数Kp对系统影响:比例系数加大,使系统的动作灵敏,速度加快,稳态误差减小。Kp偏大,振荡次数加多,调节时间加长。Kp太大时,系统会趋于不稳定。Kp太小,又会使系统的动作缓慢。(2) 积分控制Ki对系统影响:积分环节使系统的稳定性下降,Ki小(积分作用强)会使系统不稳定,但能消除稳态误差,提高系统的控制精度。最终在综合考虑系统性能的情况,选择合适比例参数与积分参数,参数具体如图6所示。
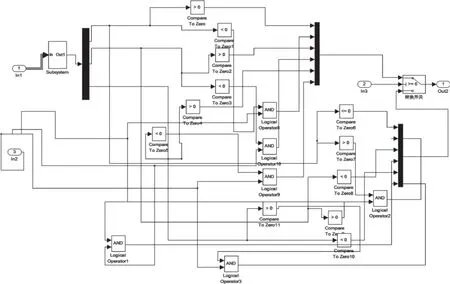
图4 位置检测与换相逻辑Fig. 4 Position detection and the commutation logic

图5 电机主电路Fig. 5 The main circuit of the motor
3 仿真结果与分析
根据上文的建模方法,建立了无刷直流电机控制系统模型,并对模型进行仿真,电机参数如表1。
在Matlab中设置算法为ode45,同时模拟外界扰动情况,在0.06s给予电机一个阶跃信号,观察外界扰动对控制系统的影响,电机设置为空载起动,预设的速度给定值为2500rpm,在上述条件下,对无刷直流电机控制系统进行仿真,仿真波形图主要包括相电流,电磁转矩,转速响应图,同时,根据仿真电机系统参数,构建实物控制系统,将仿真结果与实物控制系统的实验结果进行对比分析。
首先来分析速度波形图,从图7可以看出,初始时刻,电机转速大约在0.01s左右达到预设值,系统超调量小,响应速度快,仿真波形与实测速度波形基本一致,在0.06时给予了扰动,速度有所下降,但很快又进入稳态,反映了系统良好的动态性能。
其次来分析转矩波形图,从图8可知,电磁转矩初始时刻有较大的峰值,这是由于初始时刻,转速较低,反电动势还未建立,导致相电流较大。无刷直流电机存在固有的转矩脉动[11-12],电机电磁转矩并非完全稳定的状态,存在周期性脉动,仿真图形也很好的反映了电机的这一特性。再通过实测转矩波形与仿真波形比较可知,仿真波形图形与实测波形基本一致。

图6 速度闭环控制Fig. 6 The speed closed loop control

图7 电机速度波形Fig. 7 Motor speed waveform

图8 电机转矩波形Fig. 8 The waveform of motor torque

表1 电机参数Tab. 1 The parameters of the motor
最后分析相电流图,从图9可知,初始时刻的相电流有较大的起动电流,这是由于电机转速较低,反电动势还未建立,但随着速度的增加,相电流趋近减小,最终进入稳态,同时,可以看出,电流在换相时刻,相电流有所下降,呈凹陷状态,电流存在波动,这是无刷直流电机固有的换相电流脉动[11-12]。仿真结果基本与理论分析一致,与实测波形也比较接近。
通过上述分析可知,仿真能够正确反映系统的动静态性能。

图9 相电流波Fig. 9 The motor phase current waveform
4 结论
利用Matlab软件建立无刷直流电机控制系统仿真模型 完成了对无刷直流控制系统的仿真。将仿真结果进行理论分析,并将仿真结果与实测结果对比,最后可得出结论,即该仿真建模方式能够正确反映无刷直流电机控制系统的性能,为无刷直流电机控制系统的参数设计和控制策略优化提供了依据。
[1] 谭建成. 永磁无刷直流电机技术[J]. 北京: 机械工业出版社, 2011.3
Tan Jiancheng. Permanent magnet brushless DC motor without technology. Beijing: Mechanical Industry Press, 2011.3.
[2] 贡俊, 陆国林. 永磁无刷直流电动机在工业中的应用和发展[J]. 微特电机, 2000, (5).
Gong Jun, Lu Guolin. The development and application of permanent magnet brushless DC motor [J]. In industry, micro motor, 2000, (5).
[3] 胡灵杰, 李声晋, 卢刚. 基于Matlab无刷直流电机控制系统建模与仿真[J]. 机械与电子2007(12).
Hu Lingjie, Li Shengjin, Lu Gang. Matlab brushless DC motor control system modeling and simulation based on [J]. Machinery & Electronics 2007(12).
[4] 殷云华, 郑宾, 郑浩鑫. 一种基于Matlab的无刷直流电机控制系统建模仿真方法[J]. 系统仿真学报, 2008, 20(2).
Yin Yunhua, Zheng Bin, Zheng Haoxin. A brushless DC motor control system modeling and simulation [J]. Journal of system simulation, based on Matlab 2008, 20 (2).
[5] Carlson R, Lajoie M M, Fagundes J C. Analysis of torque ripple due phase commutation in brushless DC machines [J]IEEE Trans on Industy Applicaton , 1992, (28).
[6] 纪志成, 沈艳霞, 姜建国. 一种新型的无刷直流电动机调速系统的模糊PI智能控制[J]. 电机与控制学报, 2003, 09.
Ji Zhicheng, Shen Yanxia, Jiang Jianguo. Fuzzy PI intelligent control, [J]. motor and control of a new type of Brushless DC motor speed control system of the 2003, 09.
[7] 付明玉, 吴宝奇, 张晓霜. 基于反步滑模控制的动力定位船铺管循迹建模与分析[J]. 新型工业化, 2014, 4(3): 17-22.
FU Mingyu, WU Baoqi, Zhang Xiaoshuang. Modeling and analysis of trajectory tracking for DP vessel pipelaying based on backstepping sliding mode method[J]. The Journal of New Industrialization, 2014, 4(3): 17-22.
[8] 周小利, 王宏强, 程永强, 等. 宽带MIMO 雷达角度估计的统计分辨力[J]. 新型工业化, 2014, 4(4): 9-16.
Zhou Xiaoli, Wang Hongqiang, Cheng Yongqiang, Qin Yuliang. Statistical Resolution Limit of Angle Estimation for Wideband MIMO Radar[J]. The Journal of New Industrialization, 2014, 4(4): 9-16.
[9] 刘晓东, 黄万伟, 吴云洁, 等. 弹性弹体被动、主动和复合控制及其适用性分析[J]. 新型工业化, 2014, 4(5): 11-19.
Liu Xiaodong, Huang Wanwei, Wu Yunjie, Xiong Shaofeng. Passive, Active and Compound Control for Elastic Missile and Applicability Analysis[J]. The Journal of New Industrialization, 2014, 4(5): 11-19.
[10] 常志远. 基于自适应EWMA 算法t 控制图检测能力的研究[J]. 新型工业化, 2014, 4(6): 15-21.
CHANG Zhiyuan. Research on detection capability of t control chart based on adaptive EWMA algorithm[J]. The Journal of New Industrialization, 2014, 4(6): 15-21.
[11] 邱建琪. 永磁无刷电动机抑制转矩脉动的控制策略研究. 浙江大学博士学位论, 2002.
Qiu Jianqi. Research on control strategy of permanent magnet brushless motor torque ripple suppression. A PhD from Zhejiang University, 2002.
[12] 齐蓉, 林辉, 陈明. 无刷直流电机换相转矩脉动分析与抑制[J]. 电机与控制学报, 2006, (3).
Qi Rong, Lin Hui, Chen Ming. The brushlessDC motor commutation torque rippleanalysis and suppression of [J]. electric machines and control Reported, 2006, (3).
[13] 林平, 韦鲲, 张仲超. 新型无刷直流电机换相转矩脉动抑制控制方法[J]. 中国电机工程报, 2006, (3).
Lin Ping, Wei Kun, Zhang Zhongchao. A new brushless DC motor commutation torque ripple suppression control method of [J]. China Electrical Engineering Journal, 2006, (3).
[14]PetrovicV, OrtegaR, Stankovic AM, et al. Design and implementation of adaptive controller for torque minimization in PM synchronous motor. IEEE Trans on power electronics, 2000, (5).
Simulation Study on Control System of Brushless DC Motor based on Matlab
XIE Shaohua, QU Suichun
(College of Electrical and Information Engineering, Hunan University of Technology, Zhuzhou 412007, China)
This paper analyzes the operation principle of Brushless DC motor, this paper proposes a new method based on Matlab modeling, namely through the synchronous motor model of the original Matlab, change the inverse electromotive forceparameters, then the external set position detection and commutation circuit, which can be convenient for brushless DC motor control system the simulation model. This paper introduce the sub-modules of the controlling system in detail., at the same time, the simulation results are compared with the experimental results. Results show that, the simulation results are consistent with the experimental results, a new method of modeling in Matlab can correctly reflect the performance of Brushless DC motor control system and provides an important basis for the design and debugging of the actucal control system.
Brushless DC motor; Modeling; System simulation
10.3969/j.issn.2095-6649.2015.03.04
广东省佛山市顺德区研究生教育专项资金; 广东工业设计院政产联合培养229项目。
谢少华(1989-), 男, 硕士研究生, 主要研究方向: 新型电机驱动及控制系统设计; 瞿遂春(1963-), 男, 教授, 主要研究方向: 新型电机及其驱动控制系统、电力电子与电力传动。
谢少华,瞿遂春.基于Matlab的无刷直流电机控制系统仿真研究[J].新型工业化,2015,5(3):28-34
: XIE Shaohua, QU Suichun. Simulation study on control system of Brushless DC Motor based on Matlab [J]. The Journal of New Industrialization, 2015, 5(3): 28‒34.
猜你喜欢
大电机技术(2022年5期)2022-11-17
电工技术学报(2022年20期)2022-10-29
电机与控制学报(2022年6期)2022-07-15
汽车实用技术(2022年12期)2022-07-05
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
防爆电机(2022年2期)2022-04-26
微电机(2022年1期)2022-03-21
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
通信电源技术(2016年1期)2016-04-16
