
轴角编码器码值跳变纠错方法研究
2015-01-06 03:44陈小刚杨甘霖
中国科技信息 2015年8期
季 辉 陈小刚 杨甘霖
随着我国航天发射新一轮高峰期的到来,天线执行任务的频度越来越高。天线安全越来越受到人们的重视。轴角编码器码值跳变作为天线伺服系统常见故障,严重威胁天线安全。若天线处于位置环工作方式下轴角编码器码值跳变,导致天线飞车;若天线在跟踪环工作方式下码值跳变,则造成测角数据无效,导致航天器跟踪失败。本文立足轴角编码器工作原理,对码值跳变原因进行分析,探寻纠错方法。
轴角编码器工作原理
码值生成原理
轴角编码器主要功能是将天线实时角度信息由模拟量转换成数字量,并将其送至天线控制单元。图1 为轴角编码器组成框图,轴角编码器由旋转变压器、角度转换器、振荡器、移相器及相关总线组成。其中振荡器为旋转变压器提供正弦激磁信号,并通过移相器为角度转换电路提供基准信号。旋转变压器采用双通道多级旋转变压器,通道分为粗通道和精通道。粗通道由1 对极旋转变压器组成,精通道由64 对极旋转变压器组成。转子在空间绕轴旋转一周,定子绕组中的粗通道电势则按正余弦规律交变1 周,而精通道的电势则按正余弦规律交变64 周,换句话说粗通道输出电压的有效值变化周期为360°,而精通道的输出电压有效值变化周期为粗通道的1/64。粗、精通道输出的信号分别送入角度转换器,直接转换成二进制数字角度,即轴角编码器码值。
粗精结合
旋变输出信号经过角度转换器转换后得到14 位二进制码值,依次存入存储器,利用粗精组合软件,将14 位粗码和14 位精码组合成一组码值。对于电变比是64 的旋变来说,粗、精通道转换结果正好是错开6 位。

图1 轴角编码器组成框图
粗通道码值的第一位到第六位是整数部分,第七位(2.8175°)与精通道的最高位相对应,所以粗通道的T7~T14 就是它的余数部分,这样取粗通道码值的整数部分6 位,精通道的14 位,组合起来得到新的码值,其结果为20 位,这就是天线轴角编码值即为天线角度,见图3。
角度纠错设计
分析轴角编码器码值跳变原因,将其分为两类。
(1)信号传递过程或者旋变信号震荡等原因产生的误差,这类误差使得粗、精通道生成的码值产生差异,导致粗精结合失败。
(2)安装旋转变压器时同心度不够、长时间使用等原因,导致旋转变压器装配轴变形,引起轴角编码器产生固定偏差。
针对这两种码值跳变的机理,设计了末位纠错、零位标校两种纠错方法。若是粗精通道码值产生后进行粗精组合,若组合错误,就采用末位纠错的方法对粗通道、精通道的码值进行纠错。若组合正确但是天线角度依然存在错误,此时就需要依靠零位标定来重新设置角度值。(图4角度纠错流程图)
末位纠错
粗精结合时,粗通道的有效最低位与精通道的最高位结合。若粗通道有效最低位出错或者精通道的最高位出错,则粗精通道组合后的码值错误,导致角度跳变。这时就要对粗通道的有效最低位及精通道的最高位进行纠错,使之保持一致。

图2 多极旋变的粗精通道转换
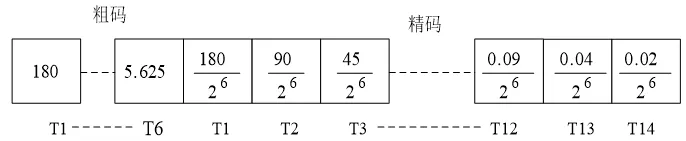
图3 轴角编码组合值

图4 角度纠错流程图
纠错分析
在组合前,对粗通道码值的整数部分进行纠错处理,其步骤是判断粗码的T7、T8 位与精码的T1、T2 是否相差11,如果不为11,则不纠。如果粗码的T7、T8 位是11,而精码的T1、T2 位是00,此时粗码比精码慢了1 位,精码已经进位,而粗码本该进位却未进。因为在20 位组合码中,精码的14 位要全部取,所以要在粗码的整数部分加1。同理若粗码的第T7、T8 位为00,精码的T1、T2 位为11,则粗码比精码快了1 位,已经超前进位了。这时需要在粗码的整数部分减1,来校正粗大跳码,保证编码精度。
程序设计
针对上文分析,当轴角编码器角度错误时,就需对比对粗通道末两位及精通道前两位,修正错误码值,保证粗精结合正确。编写程序来实现以上功能,节选语句如下。
零位标定

图5 末位纠错代码节选

图6 零位标定窗口

图7 零位标校软件代码节选
当粗精组合正确,但是天线角度依然错误,说明实际位置与显示位置产生了一定的偏差,称之为系统偏差。要修正系统偏差,需要将天线指向已知的某些固定位置,重新标定显示角度,使之与实际位置对应,即零位标定。(图6 零位标定窗口)
若方位角度跳码,控制天线缓慢运动至零位记忆刻度尺重合处,打开零位标定软件,将方位零位记忆刻度角度零值通过串口置入轴角编码器,即强行使当前显示角度更改为记录的零位记忆刻度角度零值。
若俯仰角度跳码,控制天线缓慢运动至下预限位置(下预限指示灯亮),打开零位标定软件,将下预限角度值通过串口置入轴角编码器,当前显示角度更改为记录的下预限角度值。(图7 零位标校软件代码节选)
通过零位标校,在每次轴角编码器码值生成、结合之后,程序将自动扣除系统偏差,便可以获得实际天线的角度值。
结束语
末位纠错与零位标校这两种角度纠错方法,有效地解决了轴角编码器码值跳变问题,取得了良好的实际效果,为天线的安全、稳定跟踪航天器提供了良好保障。本文所述的两种方法也同样适用于其他天线,为操作人员解决此类问题提供了参考和依据。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
科学与信息化(2021年12期)2021-12-27
炼油技术与工程(2021年4期)2021-05-03
——编码器
演艺科技(2020年7期)2020-08-13
汽车维修与保养(2020年11期)2020-06-09
客车技术与研究(2019年5期)2019-10-24
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
制造技术与机床(2017年7期)2018-01-19
中国惯性技术学报(2017年1期)2017-06-09
