
一种用于某型舰船岸电配电装置的过流保护方法研究
2015-01-04 06:23丁洪兵
船电技术 2015年4期
丁洪兵
(海军上海地区装备修理监修室,上海 200136)
0 引言
某型舰船靠岸停靠码头时,50 Hz交流机组停止运行,通过设置在甲板上的岸基供电接头给电网提供50 Hz的交流电源。岸电配电装置用于将暗点交流电源输入至舰船上50 Hz交流电站。该舰船岸电配电装置有两个控制开关,一个为岸电选择开关、另一个为220 V岸电接通开关。当交流岸电为127 V、50 Hz交流电时,岸电选择开关接通“127 V位”直接向该舰船上50 Hz交流电站供电,其中220 V岸电接通开关断开;当岸电为220 V、50 Hz交流电时,岸电选择开关接通“220 V位”使岸电电源与岸电配电装置外的变压器相连,经变压器变压成127 V后,通过接通的220 V岸电接通开关送至该舰船50 Hz交流电站。
现有舰船岸电配电装置根据输入岸基电压大小,接通不同开关向50 Hz交流电网提供交流岸电,并没有考虑过流过压保护功能,装置故障或误操作会引起岸电配电装置和用电负载的损毁,装置隐患风险大。
舰船岸电配电系统是舰船在停靠码头器件最重要的部分,它的可靠性决定了舰船靠岸时的用电安全,为了保证其在接入岸电220 V时不会发生过流故障,国内外一直在研究用于舰船岸电配电系统的过流保护技术,能够在发生过流故障的时候最快的解决,以免造成更大的危害,但是同时也需要保证保护动作的准确性,以免造成非正常的保护动作。
目前,在舰船岸电配电系统的输入端加入一个熔断器是国内主要采取的方法,但是这是一种被动的保护手段[1]。采用熔断器不失是一种好办法,但是其可能有不可恢复的性质,同时存在像浪涌电流等不可靠因素,其准确性欠佳,比如常用的滤波电路中有电感与电容,在其过渡过程中会形成尖脉冲,如果使用熔断器的系统之中有这种滤波电路,就会因为尖脉冲的存在而造成熔断器误动作。所以在舰船岸电配电系统中要尽量不采用熔断器,应使用在过流保护后可以及时恢复的过流保护电路。但是在国内,固态功率控制技术还没有用于舰船岸电配电系统作为过流保护手段。
1 采用固态功率控制器的过流保护方式
固态功率控制器(SSPC)是一种保护电路,具有转换和短路功能,SSPC由MOSFET驱动,配合控制、隔离电路以及辅助电源完成工作,是一种具有可恢复性的过流保护装置[2,3]。所以使用了 SSPC的过流保护系统如果发生了过流的故障,可恢复的保护装置将采取过流保护动作,同时其状态会传输到控制单元,控制单元会预测保护后整个舰船供电将会收到的影响,继而作出怎么进行过流故障保护的决策[4]。可以看到,固态功率控制器具有可恢复性质,采用固态功率控制器的过流保护系统可以使整个系统更加智能化。
1.1 过流保护体系设计
如前所述,固态功率控制器具有可恢复性质,同时还能增加整个系统的智能化,已经在很多行业有了使用,但是其由于拥有很多个模块,也就会使得其设计更加复杂,而且自身也有几率发生故障。但是随着后续舰船越来越复杂,舰船岸电配电系统将为更多的设备供电,如果在过流情况下固态功率控制器由于故障没有动作,将会造成整个舰船断电,甚至造成舰船上众多设备损坏的严重后果。固态功率控制器可以降低系统在刚启动的时候可能会形成的尖端电流,进而避免了采用单一的熔断器会因浪涌电流发生误动作的危害,同时还能提高系统的可靠性[7]。根据以上分析,为了进一步提高舰船岸电配电系统在舰船靠岸供电的可靠性,本文提出固态功率控制器加熔断器的方法,该方法同时拥有两者的优势,也避免了传统单一使用熔断器的不足。采用固态功率控制器加熔断器的方法的舰船岸电配电系统的配电图如图1。
1.2 参数设定
在确定采用固态功率控制器加熔断器的方法后,当舰船在接入岸电的时候或者舰船设备故障等发生过流的时候,因为SSPC和熔断器都可以进行过流保护动作的,又由于SSPC具有可恢复性质,所以SSPC需要早于熔断器发生动作前动作,待排除过流故障后,再次供电。如果熔断器在SSPC前先动作,那么SSPC的可恢复性就发挥不出来,就失去了使用固态功率控制器加熔断器的意义。

图1 配电模式示意图
从上可知,采用固态功率控制器加熔断器的方法后,整个过流保护系统具有两重保护,所以需要匹配设计SSPC和熔断器两者的过流保护曲线,即对它们的参数进行针对性的计算,这样才能达到增加使用固态功率控制器的目的。
1.2.1 熔断器的保护曲线
表1是Schulte公司的MGA-S系列熔断器的相关参数,图2是其熔断曲线,该系列熔断器是现今使用较为普遍的熔断器。

图2 MGA-S熔断器熔断曲线图
1.2.2 SSPC的保护曲线
表2是国外三家公司的SSPC的相关参数。
从表中可以看到,每个公司的SSPC的过流动作时间是不一样的,那么从其应用原理来看,其相关参数的设置就要和使用的地方紧密的结合起来,如果短时间内电源输出能量大而负载可通过大电流的情况下可采用时间较长的 SSPC,这样可提高SSPC的抗干扰能力,如果相反,就要采用时间动作时间较短的SSPC。
以表2中某公司的SSPC为例,它含有0.5、1、3及10 A共四种型号,0.5、1、3 A这三种型号的SSPC在过流电流小于额定电流8倍的时候,如果使用I2t保护方式,伴随着电流的增大,它们的动作时间会缩短,当过流电流大于额定电流 8倍的时候将会马上动作,其动作时间少于500 μs。而10 A型号的SSPC因为在过流动作时要更多的能量,所以在过流电流超过额定电流4倍的时候就会马上动作,图3是这四种型号SSPC的保护曲线。

表1 MGA-S熔断器熔断时间
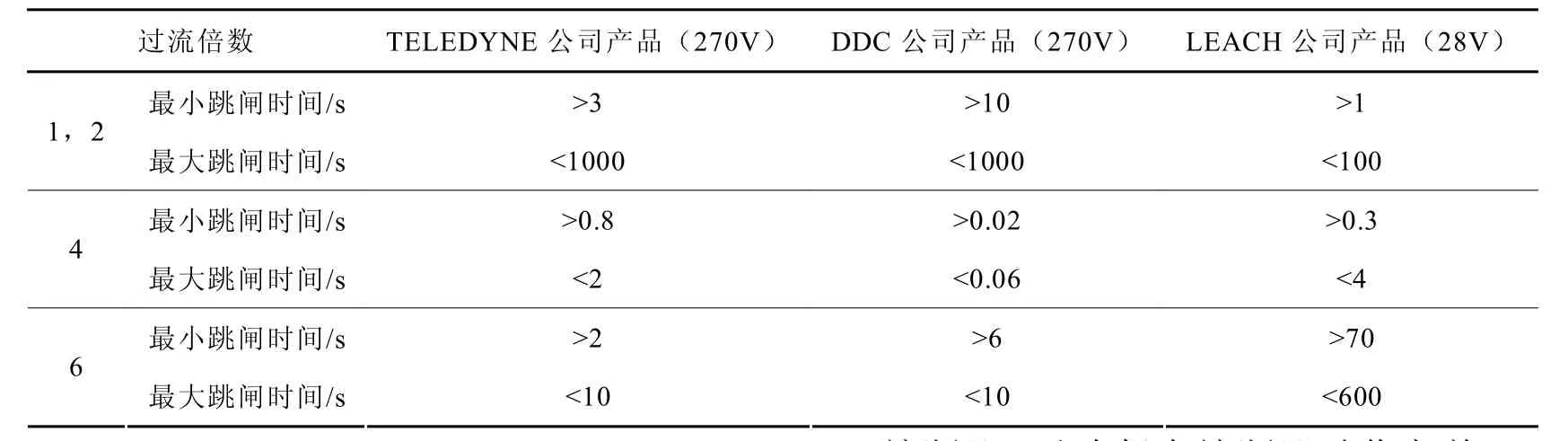
表2 SSPC的过流动作时间
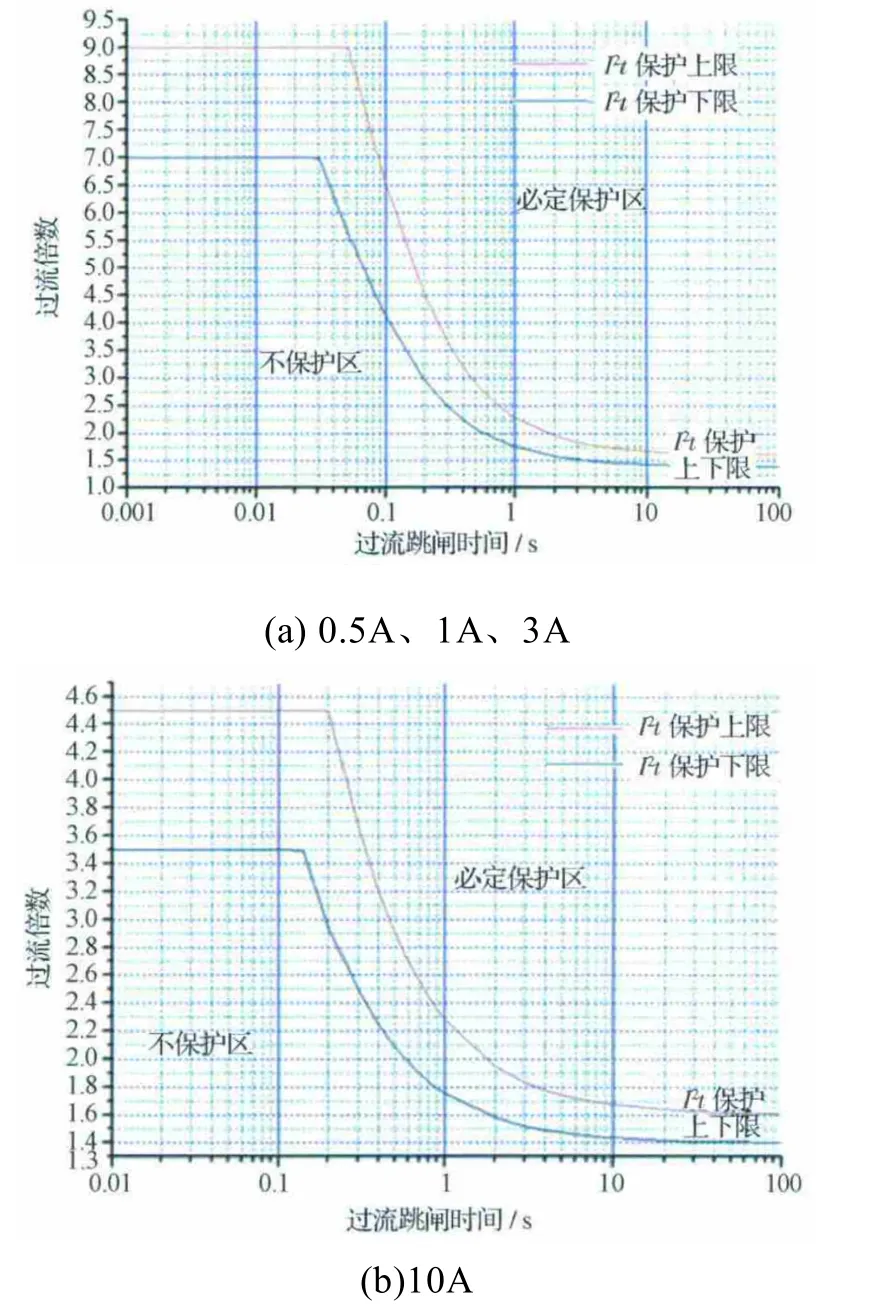
图3 SSPC产品过流保护曲线
1.2.3 过流保护参数匹配
因为需要在发生过流保护的时候,SSPC要在熔断器动作之前先动作,所以就要根据 SSPC和熔断器两者的特性曲线进行相应的设计。这就是要为各个规格的SSPC都配置一个相应容量的熔断器,以确保在熔断器动作之前SSPC先动作。我们从图2可知,熔断器的动作时间伴随着电流的增加而减少的,同时从图3又可以看到,SSPC的动作时间和熔断器一样,也是伴随着电流的增加而减小的。所以在设备发生过流故障的时候,在每一个固定的电流值,SSPC的动作时间都比熔断器的熔断时间少,而且有时间冗余,也就是可以保证熔断器在SSPC动作前不会动作,这样就保证了它们的时序要求。若要反映在图中,保证SSPC的特性曲线在熔断器下方即可。
这里以10 A规格的SSPC为例,配置一个20 A的熔断器,当系统电流为20 A的时候,已经是SSPC的 2倍,但是此时熔断器没有过流,此时SSPC动作同时熔断器没有动作;当系统电流为30 A的时候,已经是SSPC的3倍,同时是熔断器的1.5倍,熔断器的动作时间>10 s的,则SSPC动作时间能够<1s即可,此时冗余有9 s;当系统电流为40 A的时候,已经是SSPC的4倍,同时是熔断器的2倍,熔断器的动作时间>2 s的,该时刻SSPC就会立即动作,时间<500 μs,这样就保证了SSPC先于熔断器动作。从匹配的角度来看,因为固定电流规格的SSPC所对应的熔断器的规格更大,动作时间也相应的增加,然而熔断器容量也不该过大,由于容量大的可能会因为电源供给不了充足的能量熔断。所以需要按一下标准选择熔断器:

式中:Ip为舰船岸电配电系统保护电流;In为熔断器额定电流;Is为接入舰船岸电配电最大额定电流;Ie为设备最大额定电流;α为熔断器中的电流降额因子。
2 过流保护仿真及验证
通过前面可知,选择合适的SSPC和熔断器,就能够实现SSPC早于熔断器动作的目标,使得时序合适。在此基础上,本文对该方法进行了建模与仿真以及实验,以确定该方法的正确性。
2.1 仿真分析
首先对熔断器和固态功率控制器进行了建模,在建模之后对其进行了仿真与验证。
2.1.1 熔断器模型建立
首先使用电路仿真软件Saber对型号为20 A的熔断器进行了建模,并根据 Schulte公司提供的参数进行设定后,其特性仿真波形图如下:

图4 熔断器测试波形
从图4能够看到,建模的熔断器在过额定电流0.8到1.25倍的时候不会熔断,同时在过额定电流1.5倍的时候动作时间超过10 s,过额定电流1.7和2倍的时候动作时间超过2 s,这与图2中的熔断器是相符的。
2.1.2 SSPC模型建立
以电流规格为10 A的SSPC为例,其建模后所测试得到的波形如下。
从图能够看到,负载两端从0 V上升到100 V的用了45 μs,从100 V下降到0 V用了15 μs,这与SSPC的特性是一致的,故该模型是可行的。
2.1.3 过流保护仿真
同时利用Saber软件中相关器件,依据前文所分析的SSPC以及熔断器的相关数据,采用点拟合法建立I2t的过流保护模块。将各个部分连接好,搭建整个仿真系统,图6为系统的过流保护特性。
图6是电流为10 A的SSPC在系统电流由额定值突然上升到20 A的曲线。从图中可以看到,正常工作的时候,系统电流为10 A,在0.5 s的时候电流突然上升到20 A,此时SSPC动作,在1.38 s的时候断开,整个动作时间为0.88 s,系统电流下降到0 A。
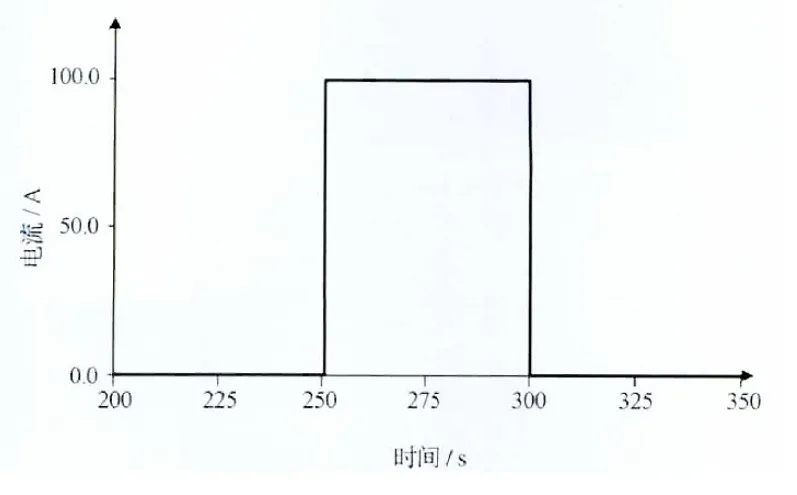
图5 SSPC测试波形

图6 10A的SSPC流过2倍的波形
图7是电流为10 A的SSPC在系统电流由额定值突然上升到36.8 A的曲线。从图中可以看到,正常工作的时候,流过系统的电流为10 A,在其突然上升到 36.8 A的时候,SSPC动作,又在502.36 ms的时候断开。整个动作时间为1.41 ms,系统电流就下降到0 A。

图7 10A的SSPC流过4倍的波形
从上面的仿真可以看出,使用该新的过流保护方法,通过对固态功率控制器和熔断器的相应设计后,在发生过流状况时,SSPC动作将先于熔断器,能够起到故障隔离目的,且熔断器不断开。
2.2 试验验证
对SSPC加熔断器的方法搭建了试验验证平台,其由稳压直流电源、驱动电路、SSPC、熔断器以及负载组成。其内部组成以及相互的连接挂下如图8。SSPC选用了电流为0.5、1、3、10 A四种,在SSPC的前端连接熔断器。试验平台的电源电压为DC100 V,固态功率控制器的偏置电压为12 V,控制信号电压为0.5 V,负载电流能够调节,SSPC的开通与关断通过驱动电路来控制。

图8 试验验证框图
在实验中,先连接好开关K1和K2,再连接好SSPC,最后将电流慢慢增加,从而对SSPC的保护特性进行测试。当SSPC动作过后,使用驱动电路马上断开 SSPC,以及将各负载调整到标准工况,就可第二次接通SSPC,调整过流大小,从而继续对SSPC的保护特性进行测试。最终得到如图9波形。
图中的绿色线条是固态功率控制器的电流特性曲线,红色线条是固态功率控制器的控制信号。(a)图是在正常工作情况下,流过负载的电流为10 A,当该电流突然上升到20 A,SSPC的动作时间为0.8 s,然后电流降低到0。(b)图是在正常工作情况下,流过负载的电流为10 A,当该电流突然上升到 37.3 A,SSPC的动作时间为 1.3 ms,然后电流降低到 0。(c)图是在正常工作情况下,流过负载的电流为3 A,当该电流突然上升到25.1 A,SSPC的动作时间为37 μs,达到在短路的情况下立刻动作的要求。
从图9的保护曲线可以看到,采用SSPC加熔断器的方法后,通过SSPC和熔断器进行匹配设计以后,系统发生过流状况时,由于SSPC的动作时间早于熔断器的,因而SSPC会先动作,这时候就能达到隔离故障且熔断器没有动作。
3 结论
本文在对国内外舰船岸电配电系统保护电路的分析后,提出了一种采用固态功率控制器加熔断器的过流保护系统,解决该舰船岸电配电系统中会出现的过流过压现象。并对这种新的过流保护系统的优缺点进行了分析,并对响应的参数进行了的设定,然后进行了仿真验证,最后做了实验以验证该过流保护方法。采用这样新的系统在利用有限的资源下,达到对舰船配电系统的过流保护,提高了整个舰船配电系统的可靠性,同时也是一种可以恢复的过流保护系统,可以用于该舰船岸电配电系统中解决过流过压现象。

图9 SSPC过流波形
[1]Hopkins D C.Current limiting remote power control module,NASA-N19-8987[R].Washington D.C.: NASA,1990.
[2]Jin Chunlian,Dougal R.A solid state over current Protectionfor industrial DC distribution systems[C].//Proceedingsof 4th International Energy Conversion Conferenceand Exhibit(IECEC).Washington D.C.:AIAA,2006: 2629.
[3]Henze C B,Mohan N,Henze C P.A programmable solid state active current limiting circuit breaker for spaceapplications[C].// Proceedings of Industrial Electronics Society,IEEE 28th Annual Conference.NewYork:IEEE,2002: 28492854.
[4]Komatsu M,Ide N,Yanabu S.A current limiting switch for application of Solidstate Largescale space powersystems[C].// Proceedings of Industrial Electronics Society,IEEE Power Electronics Specialists Conference.NewYork: IEEE,2007: 1471 1476.
[5]Hirofumi M,Fujio K,Mutsuyoshi A.Ovecurrent liraiting characteristics of the converter with a new digital current a injected control circuit[J].Transactions on Power Systems,1998,13(4): 645650.
[6]Dolce J L,Mellor P A,Kish J A.Automated electric power management and control for space station Freedom[R].NASATM103151.Washington D.C.:NASA,1990.
[7]Greg C,Frank D.X2000 power system electronics development[C]// Proceedings of 2000 Aerospace Conference.New York: IEEE,2000:341354.
猜你喜欢
上海理工大学学报(2021年3期)2021-07-20
陶瓷学报(2021年1期)2021-04-13
陶瓷学报(2021年1期)2021-04-13
水利规划与设计(2020年1期)2020-05-25
智能城市(2018年17期)2018-10-12
汽车电器(2018年1期)2018-06-05
电子制作(2017年2期)2017-05-17
电子制作(2017年19期)2017-02-02
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年6期)2016-04-20
