
基于多传感器数据融合的早期林火识别
2015-01-02 10:19赖小龙于文华赵燕东颜小飞
西北林学院学报 2015年4期
赖小龙,于文华,赵燕东,颜小飞
(北京林业大学 工学院,北京100083)
森林火灾给人类带来巨大的损失,早期林火监测是实现对森林火灾“早发现、早扑救”的主要措施。目前,我国在森林防火工作中已初步实现了卫星监测、飞机巡护、瞭望台监测和地面人员巡护的立体监测手段。国外尤其是欧美等发达国家,传统的人工巡护、人工瞭望塔监控方式正逐渐被航空巡护、卫星监测、高空红外探火以及自动瞭望塔所替代[1-3]。
针对我国的实际情况,在很长的一段时间内,近地面的监测方式都将是森林火灾监测预报中的重要举措之一[4-5]。而监测设备中单一传感器提供的数据又无法对火灾发生时森林环境参数信息进行全面的描述,且可能出现漏测漏报等失效问题,所以需要融合多传感器所采集的环境信息,进行处理和分析,从而识别火灾状态[6-7]。
本研究使用自行研制的检测设备,分别使用BP神经网络、神经模糊系统和支持向量机3种算法进行数据融合与识别,对早期林火引起的环境参数变化进行监测并对识别结果进行对比和分析。
1 材料与方法
1.1 试验材料与仪器
使用北京林业大学工学院俞国胜教授团队研发的生物质成型燃料的燃烧来模拟早期森林火灾。该生物质成型燃料的生产原料为各类森林衍生物,如木材采伐与加工剩余物、林木枝丫、树皮、灌木以及植物秸秆等。燃烧产物除CO2(充分燃烧)、CO(不充分燃烧)、水外,还生成SO2(低于100mg·m-3)、粉尘(低于200mg·m-3)以及燃烧灰烬(主要由钙、钾、镁、钠、锰、铁、磷、硫等无机成分组成)。燃烧热值为16 747kJ·kg-1左右[8-9]。
本试验采用两套自主研发的监测仪,可间隔1 min实时获取CO浓度、CO2浓度、烟雾浓度、空气温度、空气湿度。CO浓度测量采用日本NEMOTO公司微型EC805-CO传感器,测量范围0~1 000×10-6,精度±20×10-6。CO2浓度测量采用韩国ELT公司的微型红外S-100传感器,测量范围0~5 000×10-6,精度±30×10-6。烟雾浓度测量采用韩国OGAM公司的微型MS5100传感器,输出电压值0.5~5.0V,与烟雾浓度成近似线性关系,由于火灾烟雾是由气体、液体、固体微粒群组成的混合物,很难定量表征其浓度大小,故本文中直接用传感器输出的电压值表征烟雾浓度。空气温度与空气湿度测量采用瑞士SENSIRION公司的SHT11温湿度一体传感器,温度测量范围-40~123℃,测量误差±0.4℃,相对湿度测量范围0%~100%,测量误差±3%。
1.2 试验设计
试验在北京林业大学实验林场,并在微风条件下进行。选用底部通风、直径为40cm、高为60cm的铁桶,内放置方便生物质燃料燃烧的铁丝网及燃料块,在2m处安置数据采集装置,采集时间间隔为1min,实时获取CO、CO2、烟雾浓度及空气温湿度数据,直至燃料块燃烧完毕。
调整数据采集器与火源之间的距离分别为5、10、15m重复以上试验。
1.3 数据预处理
将采集装置SD卡中原始数据导入MATLAB进行预处理,并将每次试验数据整理为向量形式,一行为一条数据,列为传感器值。根据试验记录加入火灾状态列,有火为1,无火为0。预处理后,数据第1列至第6列数据分别为CO浓度、CO2浓度、烟雾浓度、温度、湿度和火灾状态。
2 结果与分析
2.1 识别性能评价参数
定义3个表征参数:有火成功识别率S、无火误识别率W、无法识别率U。
有火成功识别率S表征对实际已发生火灾进行准确识别的能力。定义如公式(1)所示:

式中,S表示有火成功识别率,N1表示真实火灾状态为1的数据条数,n1表示在真实火灾状态为1时,识别输出状态值>0.9的数据条数。
无火误识别率W 表征对实际未发生火灾却误识别为火灾的可能性。定义如公式(2)所示:

式中,W 表示无火误识别率,N0表示真实火灾状态为0的数据条数,n0表示在真实火灾状态为0时,识别输出状态值>0.9的数据条数。
无法识别率U表征无法根据测得数据识别是否有火灾的可能性。定义如公式(3)所示:

式中,U 表示无法识别率,Nall表示总数据条数,nu表示识别输出状态值在0.1至0.9之间的数据条数。
2.2 传感器组的优选结果
通过对试验数据初步分析发现,对于早期林火监测识别,在环境温差变化不大,无明显降雨的状况下,未发现温度、湿度与火灾状态有明显的相关性。其贡献率远小于CO浓度、CO2浓度以及烟雾浓度。为精简输入向量,提高分析效率,剔除温度、湿度数据,仅保留关键传感器——CO浓度、CO2浓度和烟雾浓度。
2.3 BP神经网络识别分析
BP神经网络在具体应用时,需结合实际的问题,考虑结构和参数的选择、训练样本的选取、权值初值的设定、学习算法的收敛性等问题,这些问题的解决往往需要多次的尝试与经验[10-11]。
对于训练样本与检验样本的选取,从所有实验数据中随机取出9次试验共1 160条数据,将其中3次试验共316条数据作为训练数据,其余6次试验共844条数据作为检验数据,其中测量距离为2、5、10、15m的数据条数分别为323、93、255与173。并使用matlab的mapminmax函数对训练数据与检验数据进行归一化。
输入向量的个数通常选择为传感器的个数,每个传感器的数据为1个输入向量,分别是CO浓度、CO2浓度、烟雾浓度3个输入向量。考虑到林火早期的监测与识别各参数存在时间上的连续性与相关性,本文设置了9个输入向量,分别为2min前、1min前和当前的CO浓度、CO2浓度、烟雾浓度。在算法分析中,对三输入向量和九输入向量的识别结果进行比较分析。输出向量即为火灾状态,0为无火,1为有火。
2.3.1 三输入向量BP神经网络识别 使用Matlab神经网络工具箱对数据进行分析,用newff函数创建并初始化神经网络,经过多次训练发现,在1个含有24个神经元的隐含层与含有1个神经元的输出层之间再加入1个含有4个神经元的隐含层,对识别结果有明显的改善。因此,最终确定网络结构为3-24-4-1,隐含层1包含24个tansig神经元,隐含层2包含4个tansig神经元,输出层包含1个purelin神经元。对于中小规模的BP神经网络,采用LM算法进行学习,具有最快的收敛速度和较低的存储量。训练的网络模型参数为:最小训练速度0.005,训练误差0.005,最大迭代次数为3 000次。进行多次训练,通过比较3个表征参数S、W 与U,得到较优的网络权值,并使用该权值对神经网络进行赋值。
三输入BP神经网络目标识别的结果如表1所示。可以得出,随着监测仪与燃料块之间的距离从2m增加到15m,无火误识别率W 和无法识别率U没有出现明显的变化,有火成功识别率S则由88.24%逐步降低至34.69%,且当距离增至10m时,S仍能达到67.54%。
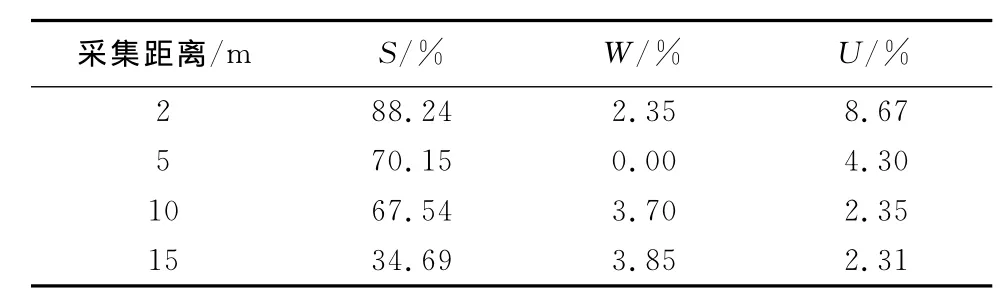
表1 三输入向量BP神经网络识别结果Table 1 Identification results of BP neural network with 3input vectors
2.3.2 九输入向量BP神经网络识别 网络结构的确定和训练与三输入向量采用同样的方法,最终确定网络结构为9-12-4-1。隐含层1包含12个tansig神经元,隐含层2包含4个tansig神经元,输出层包含1个purelin神经元。采用LM算法进行学习。训练的网络模型参数为:最小训练速度为0.005,允许误差为0.000 1,最大迭代次数为1 000次。进行多次训练,比较识别的成功率,得到识别成功率较高时的网络权值,并使用该权值对神经网络进行赋值。
九输入BP神经网络目标识别的结果如表2所示。随着监测距离的增加,无火误识别率W 和无法识别率U无明显变化且均较低,有火成功识别率S则由87.4%降低至31.29%,且当距增至10m时,S仍能达到72.81%。

表2 九输入向量BP神经网络识别结果Table 2 Identification results of BP neural network with 9input vectors
2.3.3 三输入与九输入向量BP神经网络比较由表1与表2可以得出,在BP神经网络中分别采用三输入向量与九输入向量,当监测仪与着火点距离10m以内时,有火成功识别率S分别>67.54%和72.81%,无火误识别率W 分别为0%~3.85%和0%~3.53%,无法识别率U 分别为2.31%~8.67%和0%~0.39%,均能够取得良好的火灾识别效果。而当监测仪与着火点距离大于10m时,三输入向量和九输入向量的S均显著降低,火灾识别效果较差。
综上,BP神经网络算法对于监测仪监测到的10m范围内的火灾参数信息能够实现较为准确的识别,且与三输入向量相比,九输入向量可以得到更高的有火成功识别率S,同时得到更低的无火误识别率W和无法识别率U。因此,在BP神经网络算法的火灾识别中,九输入向量优于三输入向量。
2.4 神经模糊系统识别分析
通常所述的模糊神经网络,既包括将模糊化概念和模糊推理引入神经元的模糊神经网络,也包括基于神经网络的模糊系统。前者称为狭义的模糊神经网络,后者称为神经模糊系统[12]。本研究仿真使用MATLAB的自适应模糊神经推理系统,也称为基于神经网络的自适应模糊推理系统(adaptive network-based fuzzy inference system),简称 ANFIS。
2.4.1 三输入ANFIS识别 使用genfis1函数建立三输入一输出神经模糊推理系统,采用试凑法多次进行参数配置尝试。每个输入配置2条gauss2mf隶属度函数,输出配置为linear函数,使用anfis函数进行学习训练,设置学习方式为BP学习算法,学习迭代次数为90 000次,训练误差达到0.149。
使用evalfis函数进行目标识别检验。识别结果如表3所示。可以得出,随着监测仪与燃料块之间的距离从2m增加到15m,无火误识别率W 无变化均为0%;无法识别率U总体上升,当距离增加至10m时,U达到43.14%;有火成功识别率S总体上由74.37%逐步降低至15.65%,且当距离增加至5m时,S即仅为55.22%。

表3 三输入向量神经模糊系统识别结果Table 3 Identification results of ANFIS with 3input vectors
2.4.2 九输入ANFIS识别 使用genfis1函数建立九输入一输出神经模糊推理系统,采用试凑法多次进行参数配置尝试。每个输入配置2条gauss2mf隶属度函数,输出配置为linear函数,使用anfis函数进行学习训练,由于规则条数达到了512条规则,训练时间长,先使用混合算法学习140次,再使用BP算法学习10 000次,最终训练误差达到0.098。
使用evalfis函数进行目标识别检验。识别结果如表4所示。可以得出,随着监测仪与燃料块之间的距离从2m增加到15m,无火误识别率W 无明显变化且均较低,无法识别率U 在29.72%~35.29%之间没有出现明显的变化,有火成功识别率S则总体上由64.29%逐步降低至22.45%,当距离增至5m时,S%即仅为32.84%。
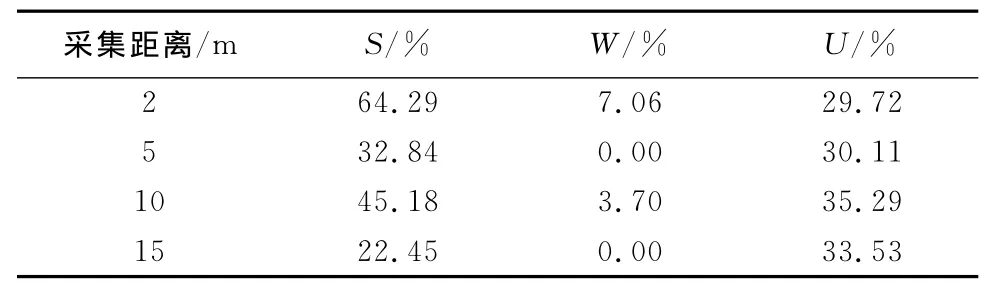
表4 九输入向量神经模糊系统识别结果Table 4 Identification results of ANFIS with 9input vectors
2.4.3 三输入与九输入向量的ANFIS对比 由表3和表4可以得出,在ANFIS神经模糊系统中分别采用三输入向量与九输入向量,仅当监测仪与着火点距离2m时,有火成功识别率S分别为<74.37%和64.29%,无火误识别率W 分别为0%和7.06%,无法识别率U 分别为15.17%和29.72%,取得了可以接受的识别效果。而当监测仪与着火点距离5m及以上时,有火成功识别率S分别<55.22%和45.18%,无法识别率U分别达到30.11%~43.14%和30.11%~35.29%,火灾识别效果均较差。
综上,三输入向量与九输入向量的ANFIS神经模糊系统,均未得到良好的识别效果。
2.5 支持向量机识别分析
支持向量机(support vector machine,SVM)是基于统计学习理论的一种新的通用学习方法,它是一种专门研究小样本情况下机器学习规律的理论,为解决有限样本的学习问题提供了一个统一的框架,使许多原来难以解决的问题得到了解决或改进,比如网络结构选择问题、过学习问题、局部极小点问题等问题,在这些问题上,支持向量机已表现出很多优于已有方法的性能[13-15]。
本研究采用matlab中自带的SVM函数svmtrain与svmclassify进行目标识别。训练样本与检验样本与前文BP神经网络的样本数据相同,输入向量也分为三输入向量与九输入向量。
2.5.1 三输入向量SVM算法识别 选用SVM网络结构参数如下:核函数选用径向基函数(RBF核函数),指定寻找超平面方法为二次规划(QP),惩罚参数为2.7。
三输入SVM算法目标识别结果如表5所示。可以得出,随着监测仪与燃料块之间的距离从2m增加到15m,有火成功识别率S由90.76%逐步降低至32.65%,且当距离增加至10m时,S仍达到73.68%;无火误识别率W 与无法识别率U均约为0%。
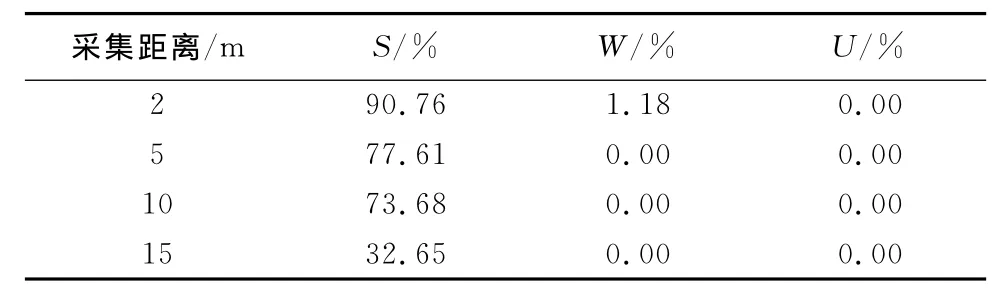
表5 三输入向量支持向量机识别结果Table 5 Identification results of SVM with 3input vectors
2.5.2 九输入向量SVM算法识别 选用SVM网络结构参数如下:核函数选用径向基函数(RBF核函数),指定寻找超平面方法为最小二乘法(LS),惩罚参数为40。
九输入向量SVM算法的目标识别结果如表6所示。可以得出,随着监测仪与燃料块之间的距离从2m增加至15m,有火成功识别率S由91.18%逐步降低至31.97%,且当距离增至10m时,S仍达到77.19%;无火误识别率W 与无法识别率U均约为0%。
2.5.3 三输入与九输入向量的SVM比较 由表5和表6可以得出,在SVM算法中分别采用三输入向量与九输入向量,当监测仪与着火点距离10m以内时,有火成功识别率S分别为73.68%~90.76%与77.19%~91.18%,无火误识别率W 分别为0%~1.18与0%~3.53%,无法识别率U均为0%,能够取得优异的火灾识别效果。当监测仪与着火点距离在15m及以外时,三输入与九输入两项的S均显著降低,未取得良好的火灾识别效果。

表6 九输入向量支持向量机识别结果Table 6 Identification results of SVM with 3input vectors
综上,SVM算法对于监测仪检测到的10m范围之内的火灾参数信息能够实现准确的火灾识别。且与三输入向量相比,九输入向量提高了有火成功识别率S。因此,在SVM算法的火灾识别中,九输入向量优于三输入向量。
2.6 3种识别算法的对比
图1为监测仪与着火点距离分别为10m及以内、15m,输入向量个数分别为3与9的不同识别算法有火成功识别率S的统计图。从图1可以得出,当监测仪与着火点距离10m以内时,对于有火成功识别率S,SVM算法(九输入向量)的有火成功识别率最高为85.43%,对已发生的火灾有良好的识别能力,BP神经网络算法(九输入向量)与ANFIS神经模糊系统(三输入向量)则分别为80.29%与60.29%;在15m距离时,3种算法的识别率均大幅下降,SVM算法为31.79%~32.65%,BP神经网络算法为31.29%~34.69%,神经模糊系统算法为15.65%~22.45%,均无对已发生火灾的良好识别能力。

图1 有火成功识别率统计直方图Fig.1 Histogram of statistics of successful recognition rate of fire
图2为监测仪与着火点距离分别为10m及以内、15m,输入向量个数分别为3与9的不同识别算法无火误识别率W 的统计图。从图2可以得出,对于无火误识别率W,BP神经网络算法为0%~3.85%,ANFIS神经模糊系统为0%~4.8%,SVM算法为0%~2.54%,3种算法均在较低的范围内,且SVM算法最低,仅0%~2.54%,即几乎不会发生没有火灾却误识别为火灾的情况。
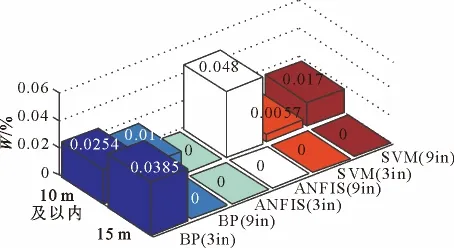
图2 无火误识别率统计直方图Fig.2 Histogram of statistics of false recognition rate of fire
图3为监测仪与着火点距离分别为10m及以内、15m,输入向量个数分别为3与9的不同识别算法无法识别率W 的统计图。从图3可以得出,对于无法识别率U,九输入向量BP神经网络算法为0%~0.3%,三输入向量ANFIS神经模糊系统为28.47%~28.91%,SVM算法最低为0%,即完全不存在无法识别是否有火灾的情况。

图3 无法识别率统计直方图Fig.3 Histogram of statistics of unable recognition rate of fire
因此,在本研究的早期林火识别应用上,综合有火成功识别率S、无火误识别率W 和无法识别率U总体上看,SVM算法体现出了比BP神经网络算法与模糊神经系统算法更加优秀的性能。
3 结论
基于我国林火监测现状,针对近地面监测中的早期林火识别提出了多传感器融合算法的设想,并设计了仿真实验,并使用matlab对试验数据进行预处理,使用BP神经网络、模糊神经系统、支持向量机对试验数据进行分析识别,并通过性能评价参数(S、W、U)对识别结果性能进行比较,得出支持向量机算法相比于BP神经网络算法与神经模糊系统算法更具有优势,在较近距离时,九输入向量的支持向量机算法得到了良好的识别效果。受传感器采集数据有效距离的限制,识别算法在火源距离超过15m时,3种算法的识别性能均下降,扩展各参数传感器的有效距离,扩展算法的识别距离有待于进一步研究。
[1] 韩恩贤,薄颖生,韩刚.森林火灾灾害等级划分初探[J].西北林学院学报,1998,13(1):80-83.HAN E X,BO Y S,HAN G.A preliminary research on grading of forest fire calamity[J].Journal of Northwest Forestry,1998,13(1):80-83.(in Chinese)
[2] 吴雪琼,覃先林,李程,等.我国林火监测体系现状分析[J].内蒙古林业调查设计,2010,33(3):69-72.WU X Q,QIN X L,LI C,et al.Analysis of current forest fire monitoring system in China[J].Inner Mongolia Forestry Investigation and Design,2010,33(3):69-72.(in Chinese)
[3] 肖化顺,刘小永,曾思齐.欧美国家林火研究现状与展望[J].西北林学院学报,2012,27(2):131-136.XIAO H S,LIU X Y,ZENG S Q.Status and prospect of forest fire research in Europe and the United States[J].Journal of Northwest Forestry University,2012,27(2):131-136.(in Chinese)
[4] 白尚斌,张晓丽.林火预测预报研究综述[J].森林防火,2008(2):22-25.
[5] 舒立福,张小罗,戴兴安,等.林火研究综述(Ⅱ)——林火预测预报[J].世界林业研究,2003,16(4):34-37.SHU L F,ZHANG X L,DAI X A,et al.Forest fire research(Ⅱ):Fire Forecast[J].World Forestry Research,2003,16(4):34-37.(in Chinese)
[6] 杨帆,陈茂林,吴迅.基于传感器信息融合技术的森林火灾报警系统[J].华中科技大学学报:自然科学版,2013,41(2):22-25.YANG F,CHEN M L,WU X.Warning System for forestfire based on sensor information fusion technology[J].Journal of Huazhong University of Science and Technology:Natural Science Edition,2013,41(2):22-25.(in Chinese)
[7] 刘足江.基于森林火灾监测系统中多传感器数据融合的研究[D].昆明:昆明理工大学,2013.
[8] 俞国胜,肖江,袁湘月,等.发展中国林木生物质成型燃料[J].生物质化学工程,2006(12):45-50 YU G S,XIAO J,YUAN X Y,et al.Development of forest woody biomass briquette in China[J].Biomass Chemical Engineerings,2006(12):45-50(in Chinese)
[9] 李美华,俞国胜.生物质燃料成型技术研究现状[J].木材加工机械,2005(2):36-40.LI M H,YU G S.Current situation of research on boifuel shaping technology[J].Wood Processing Machinery,2005(2):36-40.(in Chinese)
[10] 杨晓帆,陈廷槐.人工神经网络固有的优点和缺点[J].计算机科学,1994,21(2):23-26.YANG X F,CHEN T H.Inherent advantages and disadvantages of artificial neural networks[J].Computer Science,1994,21(2):23-26.(in Chinese)
[11] 孙玉荣,张贵.基于神经网络的森林火灾危害程度预测研究[J].西北林学院学报,2010,25(3):147-150,162.SUN Y R,ZHANG G.Forecasting study of Forest-Fire harm degree based on neural network[J].Journal of Northwest Forestry University,2010,25(3):147-150,162.(in Chinese)
[12] 张凯,钱锋,刘漫丹.模糊神经网络技术综述[J].信息与控制,2003,32(5):431-435.ZHANG K,QIAN F,LIU M D.A survey on fuzzy neural network technology[J].Information and Control,2003,32(5):431-435.(in Chinese)
[13] 张学工.关于统计学习理论与支持向量机[J].自动化学报,2000,26(1):32-42.ZHANG X G.Introduction to statistical learning theory and support vector machines[J].Acta Automatica Sinica,2000,26(1):32-42.(in Chinese)
[14] 许建华,张学工,李衍达.支持向量机的新发展[J].控制与决策,2004,19(5):481-484,495.XU J H,ZHANG X G,LI Y D.Advances in support vector machines[J].Control and Decision,2004,19(5):481-484,495.(in Chinese)
[15] 郭宝华,范少辉,官凤英,等.基于支持向量机的竹林信息提取研究[J].西北林学院学报,2014,29(2):80-84.GUO B H,FAN S H,GUAN F Y,et al.Bamboo information extraction based on support vector machine[J].Journal of Northwest Forestry University,2014,29(2):80-84.(in Chinese)
猜你喜欢
江苏安全生产(2022年11期)2023-01-11
现代仪器与医疗(2021年6期)2022-01-18
山西林业(2021年2期)2021-07-21
电工材料(2021年6期)2021-01-02
中国新闻周刊(2020年6期)2020-03-08
中国听力语言康复科学杂志(2019年3期)2019-06-24
听力学及言语疾病杂志(2019年3期)2019-05-24
电子制作(2018年9期)2018-08-04
电子制作(2018年12期)2018-08-01
中国交通信息化(2018年3期)2018-06-13
