
风力发电变桨伺服电机启动策略的探究
2015-01-01 02:27蔡罗强易灵芝张甲兵
机械工程与自动化 2015年5期
徐 斌,蔡罗强,易灵芝,张甲兵
(1.湘潭大学 信息工程学院,湖南 湘潭 411100;2.湘电集团技术中心,湖南 湘潭 411105)
0 引言
变桨驱动器作为风力发电变桨系统中重要的组成部分,对执行的伺服电机起控制作用,伺服电机在风机桨叶角度变化过程中直接起着驱动作用。直流电机结构简单、启动转矩大、过载能力强,当驱动器出现问题时,可由备用直流电源直接拖动电机进行紧急顺桨,加上考虑行业成本因素,所以直流伺服电机在风力发电变桨领域占有一席之地。
目前兆瓦级风机的桨叶材质一般采用碳纤维增强塑料,制造的桨叶薄、刚性好,减轻了风机的重量,但是,变桨启动时,为了有好的动态响应,必须尽量缩短伺服电机的启动时间,如果启动电枢电流为电机过载能力所允许的最大电流值,必然会以最大的转矩启动,但容易损坏风机桨叶等附件。所以,本文提出了一种伺服电机启动控制方式,既能将启动电枢电流控制在允许的过载电流范围内,又能提供大的转矩,实现快速变桨,满足快速动态响应的需求。
1 永磁直流电机的启动方法
1.1 全压启动
全压启动是直接将电动机接到额定电压下启动,由公式Ia=(U-Ea)/Ra、Ea=CeΦn和T=CTΦIa(其中,Ce为电动势常数,CT为转矩常数,T为电磁转矩,U为电枢电压,Ra为电枢电阻,Ea为感应电动势,Ia为电枢电流,n为电动机转速,Φ为磁通量)可知,全压启动初始阶段,转速n从零开始增大,电动机的电枢绕组Ra很小,而感应电动势Ea不能瞬间增大,此时电机电枢中电流Ia会突增,过大的电流将使电枢过热,降低使用寿命,同时会使电动机换向时产生强烈火花,而与电流成正比的电磁转矩很有可能损坏传动结构。此种启动方式虽然操作简单,不需要添加其他设备,但只适用于小型电动机,对于脆弱的变桨传动结构和采用碳纤维增强塑料材质的桨叶是不适合的。
1.2 分级启动
分级启动其实质是在电机启动过程中,将电阻串联到电动机电枢和电源两端,通过不同时段切除电阻的方法,改变电机的机械特性,将启动电流限制在允许的范围内,达到安全启动的目的。
图1为永磁直流电机分级启动的机械特性。其中,I1为最大启动电流,I2为最小启动电流,IN为电机额定电流,n0为直流电机空载转速。启动开始时,电机电枢在接有三级启动电阻R1、R2和R3的情况下启动加速,此时电机运行在第一条特性曲线n0ba上的ab段;在加速过程中,转速n沿ab线段逐渐上升,而电枢电流Ia则逐渐变小,随着电流的减小,电机的转矩值下降,为了使电机得到较大的加速度,当转速升到b点时,将第一级电阻R1切除,在电阻R1切除的瞬间,由于电机的惯性,转速n不能突变,电枢电动势Ea也保持不变,由直流电动机电枢电流公式Ia=(UEa)/Ra可知,电枢两端电压U不变,Ea不变,当Ra减小时,Ia增加,所以电枢电流Ia将随R1被短接而突增,图1中表现为从b点过渡到c点,同时,电机的转矩也按比例增加,R1切除后,电机便运行在第二条启动特性曲线n0dc上;重复之上的运行过程,使电机有较均匀的加速度,沿着固有特性继续加速,当输出转矩值等于负载转矩时,电机进入平稳运行。该启动方式能缓和转矩对传动机构与工作机械的有害冲击,改善电动机的换向情况,但是变阻器比较笨重,需要消耗许多能量,用于风机上加重了机身的重量,同时不能给定一个恒定增大的转矩值,不适合于风机变桨伺服电机的启动。
2 直流伺服驱动器的构成
2.1 驱动器的控制框架
直流伺服驱动器控制系统的结构框架如图2所示。主要由6个模块组成:以DSP芯片R5F70844AD80FPV为处理器的核心处理单元;电压、电流、位置信号的检测单元完成闭环控制的信号检测采集过程;晶闸管主电路模块驱动电机转动;触发电路实现直流电机的调速;上位机模块实时改变控制伺服电机的各类参数,根据实际需要达到最优控制;LED显示实时监测的电机转速、故障信号等。

图1 永磁直流电机分级启动的机械特性

图2 直流伺服驱动器控制系统的结构框架
2.2 驱动器的正反桥主电路结构
图3为驱动器的正反桥主电路结构。主电路由12个晶闸管构成正反桥可逆电路,可实现直流电机的正转和反转,三相交流输入的电压标准值为380V,整流滤波直流输出侧的电压为520V左右。因关断时环路中寄生电感的作用,晶闸管在关断时两端所承受的尖峰电压可以达好几百伏,因此也在晶闸管两端并联了阻容电路来吸收尖峰电压。根据需要,选取的晶闸管型号为MCC 95-16iO1B,其反向重复峰值电压为1 600V,额定正向平均电流为95A,满足变桨伺服驱动器功率和裕量的要求。
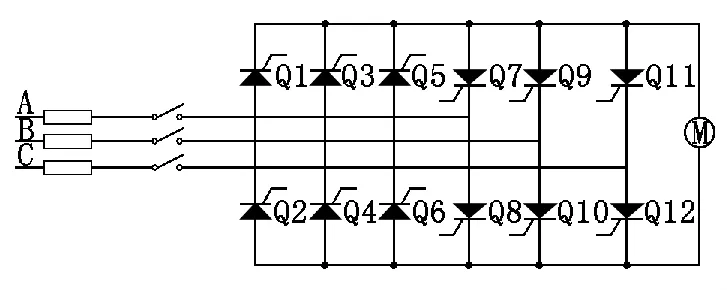
图3 驱动器的正反桥主电路结构
2.3 晶闸管触发电路模块
图4为晶闸管触发电路模块。由Q1、Q2构成的脉冲放大环节和脉冲变压器TR以及附属电路构成的脉冲输出环节两部分组成。当Q1、Q2导通时,通过脉冲变压器向晶闸管的门极和阴极之间输出触发脉冲,D1和R3是为了使Q1、Q2由导通变为截止时脉冲变压器TR释放其储存的能量而设的。
3 驱动器主系统控制思路及其软件功能实现
根据风力发电变桨的需求,驱动器输出可控的直流电压,控制伺服电机的正转、反转、调速、制动,以达到变桨控制系统精确桨叶位置控制和快速动态响应的要求。驱动器主系统控制程序流程如图5所示。系统完成上位机对各额定值的读取及各参数的初始化设置,为了使开通晶闸管的触发脉冲与施加于晶闸管的交流电压保持合适的相位关系,同时触发电路工作频率与主电路交流电源频率保持一致,利用一个同步变压器,将其一次侧接入为主电路供电的电网,由其二次侧提供同步电压信号。

图4 晶闸管触发电路模块

图5 驱动器主系统控制程序流程图
驱动器的主电路是三相桥式反并接可逆电路,三相桥式全控整流电路的6个晶闸管触发脉冲相位依次相差60°,相位控制是以变流电路的自然换相点为基准,经过一定的相位延迟后,再输出控制信号给晶闸管触发电路,产生相应的触发脉冲。以C相电压为例,DSP芯片检测到C相同步电压信号,启动定时器工作,当定时器计数溢出,输出第一个脉冲触发的控制信号,同时上次给予晶闸管导通的控制电路补发一次触发脉冲的控制信号,这样实现了全控电路的双脉冲触发,避免了因为电网波动所带来的电位误差。这种双脉冲触发方式,能防止脉冲变压器饱和,降低了触发电路的功率。
同时在整流输出端采用电压输出的闭环控制,实现输出直流电压连续可调。利用DSP芯片采集输出的直流电压信号,并与程序中所预设的输出电压值进行比较,若小于预设值,则继续进行触发脉冲的移相处理,增大输出电压,直到输出电压和输出电压预设值相等,则保持恒定输出,完成启动。
4 仿真辅助及结果比较分析
以Simulink仿真平台为辅助,设计仿真参数,将得到的降压启动电流波形与分级启动和直接启动的仿真电流波形作比较,如图6~图8所示。
降压启动方法与分级启动、全压启动相比,降压启动能将电枢电流限制在驱动器的过载电流可承受范围之内,缩短了启动时间,加快了整个驱动器的响应,同在变桨过程中渐变大的转矩保护桨叶和伺服电机之间的传动机械,是符合风力发电变桨系统的需求的。

图7 分级启动电流波形

图6 降压启动电流波形

图8 全压启动电流波形
[1] 窦真兰,王晗,凌志斌,等.电动变桨距控制系统设计与实现[J].电力电子技术,2011(7):1-2.
[2] 顾绳谷.电机及拖动基础[M].北京:机械工业出版社,2007.
[3] 王兆安,刘进军.电力电子技术[M].北京:机械工业出版社,2009.
[4] 郝浩,李宏.基于单片机的晶闸管触发器的设计[J].电子设计工程,2009(2):2-3.
[5] 洪乃刚.电力电子、电机控制系统的建模和仿真[M].北京:机械工业出版社,2011.
猜你喜欢
现代信息科技(2022年20期)2022-11-17
火力与指挥控制(2022年5期)2022-07-25
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
大电机技术(2018年4期)2018-09-26
通信电源技术(2016年1期)2016-04-16
电源技术(2016年2期)2016-02-27
东北电力大学学报(2015年1期)2015-11-13
电子设计工程(2015年12期)2015-02-27
电测与仪表(2014年20期)2014-04-04
