汽车LED前照灯智能控制系统设计*
2015-01-01 03:12郭全民
西安工业大学学报 2015年5期
郭全民,杨 惠,王 健
(西安工业大学 电子信息工程学院,西安710021)
随着我国科技和经济的发展,汽车的普及范围也越来越广.汽车在为我们带来便利的同时,由于照明等问题的影响,道路交通事故频繁发生.据统计,夜间发生交通事故的比例占事故总数的50%,对事故的原因统计分析,发现照明条件差是重要原因之一[1].因此设计更实用、更智能的车灯控制系统已经成为当务之急.
关于汽车前大灯远近灯光的自动控制问题,前人也有所研究,也制作出了相应的电子产品.传统的汽车车灯控制系统有很多特点,但是使用寿命短,采用纯电路设计模式,线路复杂[2].目前在汽车的前大灯远近灯光的控制问题上,汽车生产厂家大多设计为手动转换装置控制,人工手动操作,车灯亮度单一,视距较短,不能随外界环境的变化自动调节亮度和模式[3];在汽车转弯照射范围调整的控制中,汽车前照灯大都不能随车轮的转向而同步转动,在夜间行驶转弯时就会存在照明死角,转弯内侧的路面没有灯光照明而看不清楚,带来了巨大的安全隐患[4].针对汽车车灯控制系统存在的问题,文中设计了以单片机为核心的控制系统.
系统可以对环境亮度、车速和方向盘转角进行精确感测和判断,可根据需要实现前照灯的自动关闭和随动转弯,为驾驶员提供最佳照明,同时本系统可以自我诊断,减少汽车前照灯的故障率,将安全事故减小到最低.采用LED作为前照灯,可以延长车灯寿命、提高光质量,并且对环境保护和抑制温室效应也有重要意义.
1 汽车LED组合灯控制系统
1.1 系统工作原理
系统采用带控制器局域网(Controller Area Network,CAN)总线接口的单片机为控制器,以各传感器输入电路、各开关量输入电路、信号调理电路、步进电机和继电器驱动电路、故障报警电路、系统电源等构成外围硬件电路.控制系统通过CAN收发器与车辆控制器实现信息的交互.系统总体框图如图1所示.
1.2 系统基本功能
系统主要实现前照灯自动开闭、会车远近光灯自动切换、前照灯随动转弯、前照灯延迟关闭、故障报警以及车辆中控交互等功能.
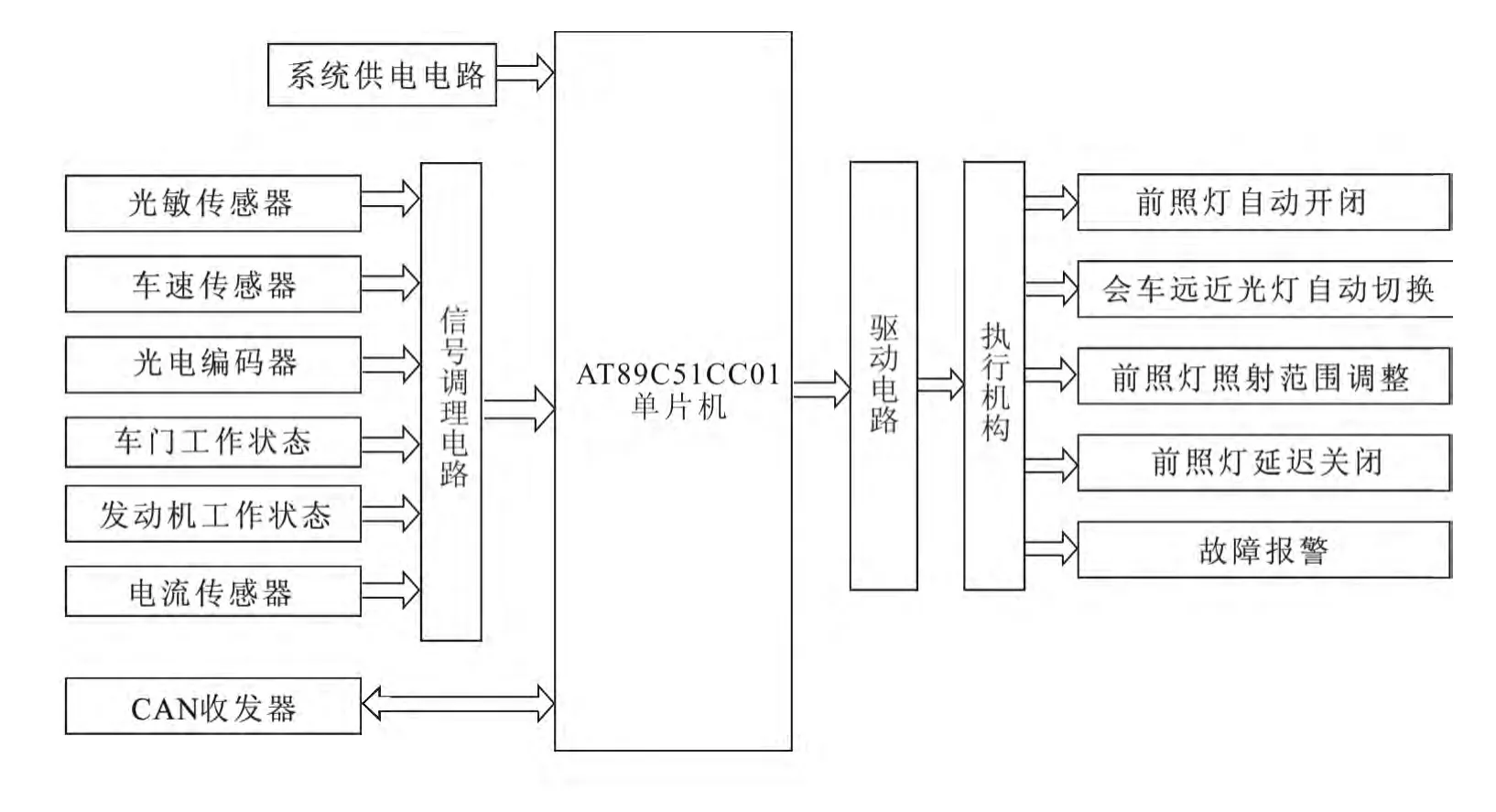
图1 系统总体框图Fig.1 System overall block diagram
2 系统硬件设计
2.1 主控制器
主控制器选择内部集成CAN控制器的AT89C51CC01单片机,该单片机是Atmel公司生产的一种高性价比单片机.自带CAN控制器,内部提供32K 字节Flash Memory、2K 字节的Bootloader、2K 字节EEPROM 和1.2K字节的RAM,且内部自带10位A/D转换和PWM发生器等其他功能.拥有34个输入/输出(I/O)管脚,最大时钟频率40MHz.
2.2 传感器模块设计
2.2.1 光照强度检测模块
系统选用光敏电阻GL4526来检测光照的强度.将光敏电阻安装在汽车前部挡风玻璃前感应外界光强;安装在后视镜支架上感应会车时光照强度.光敏传感器感测光照强度,其阻值大小随光照强度变化而变化,并将光强信号转换为电信号.光敏传感器的信号调理电路如图2所示,利用放大器LM324和比较器LM339对信号进行放大、比较后,分别通过单片机I/O口P1.0和P1.1送入单片机进行判断处理,调节电位器Rf的阻值可以设定负端的门限电压.在电压比较器中加入正反馈,形成滞回比较器,可以提高比较器的抗干扰能力,避免输出电压在阈值点反复跳变.
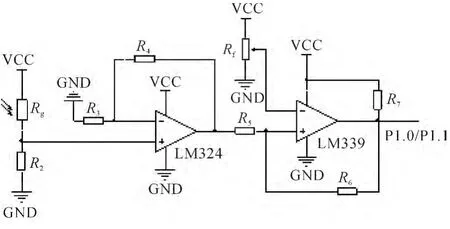
图2 光敏传感器信号调理电路Fig.2 Light sensors signal conditioning circuit
2.2.2 车速检测模块
系统用霍尔车速传感器,将传感器安装在汽车变速轴输出轴上,顶端靠近带齿的转子处,当转子转动时,线圈上就会产生交流信号,车速传感器将交流信号转化成为电压信号,输入到单片机,然后计算出采样周期内累积的脉冲数,式(1)计算出车辆的速度

式中:N为单位时间内传感器产生的脉冲数;R为车轮半径;T为脉冲采样周期;Z为信号齿的齿数;i为主传动比.
车速传感器信号调理电路如图3所示,由于传感器输出的信号比较小,通过电容C8的充放电来实现准确检测信号,经RC滤波和光电隔离后通过P1.2口输入到单片机进行计数处理.
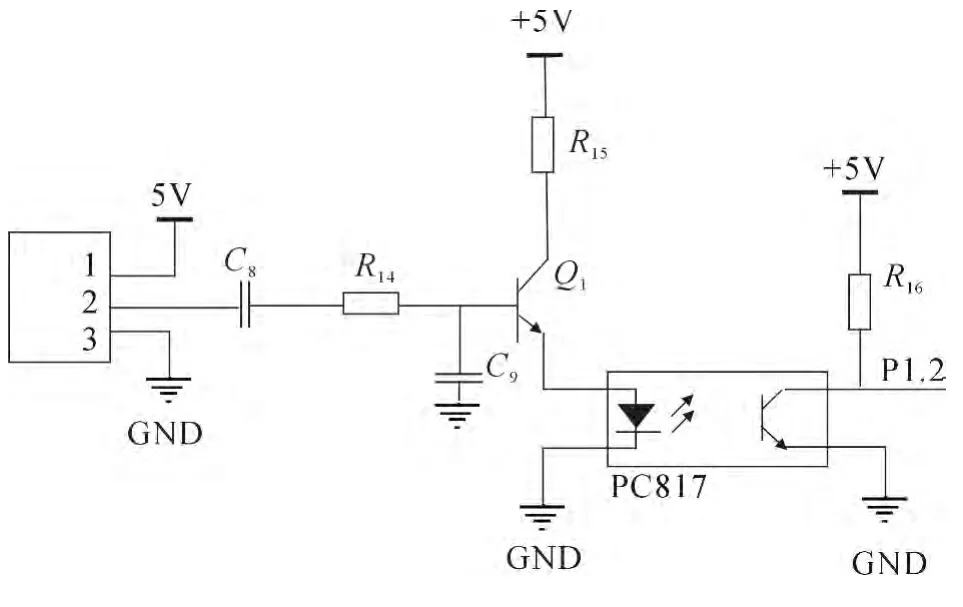
图3 车速传感器信号调理电路Fig.3 Vehicle speed sensor signal conditioning circuit
2.2.3 方向盘转角检测模块
张华军:当我们把关注点放到“关系”上时,我们可能就要打破新手教师和成熟教师的界限,因为我们可以看到,新手教师对课堂非常艺术的处理,他能自觉地在一个不断生成的课堂允许很高质量的创造发生,而这种情况可能不会在一个经验丰富的成熟教师身上发生。我们不能完全把它归结为天赋,它一定是与一个人的思维品质和他对教育的深层次理解有关,也与教师是否愿意探究课堂教学技术层面之外的更深层次的东西有关。
由光电编码器原理可知,当方向盘转角发生变化时,光电编码器便会发出与角度值成比例的A、B两路数字脉冲信号,相位差90°,正转时A超前B90°,反转时B超前A90°.通过对脉冲的计数可以得到方向盘转角的大小[5].系统选用光电编码器ZSP3806,分辨率为360个脉冲/圈.需要对编码器的输出信号进行鉴相后才能计数.
鉴相计数电路如图4所示.由一个D触发器、2个与非门和3片74LS193计数器组成.在系统上电初始化时,先对CLR信号进行复位,再将LD信号初值设为800H,即2048.当方向盘顺时针旋转时,A超前B 90°,上面与非门关闭,下面与非门打开,计数脉冲送至计数器的加脉冲输入端CPU进行加法计数;当方向盘逆时针旋转时,B超前A 90°,下面与非门关闭,上面与非门打开,计数脉冲通过波形送至计数器的减脉冲输入端CPD进行减法计数.
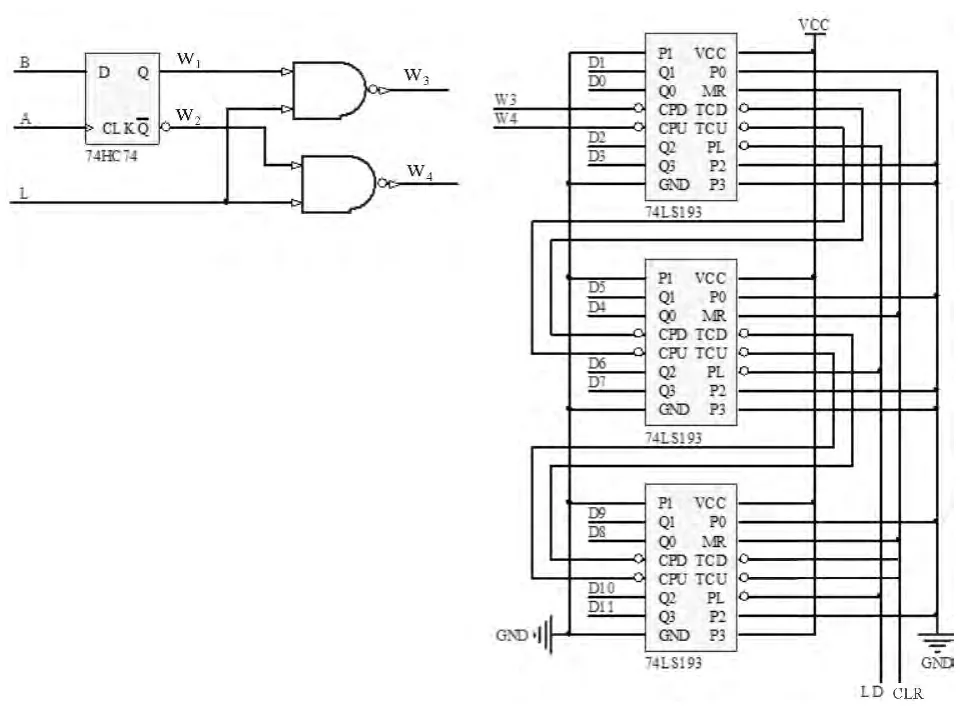
图4 鉴相计数电路Fig.4 Phase counting circuit
2.2.4 电流检测模块
系统选择ACS712系列霍尔元件电流传感器测量电路中电流变化.该器件为5V单电源操作,输出灵敏度185mV/A,可测±5A的电流,能输出与检测的电流成比例的电压.传感器检测线路中电流变化量,通过P0.0口输入到单片机,经过内部A/D转换、判断处理,当线路中电流变化大于等于±10%时,单片机P2.7输出高电平,蜂鸣器报警.
2.3 发动机和车门检测模块
系统通过用I/O口检测发动机和车门的工作状态,其电路如图5所示.发动机工作状态和车门状态都是开关量,采用RC滤波和PC827光电隔离后通过I/O口P3.0和P3.1输入到单片机.图中的发光二极管分别用来指示车门和发动机的工作状态.当汽车发动机停止工作且车门打开时,延时照明功能才开始工作.
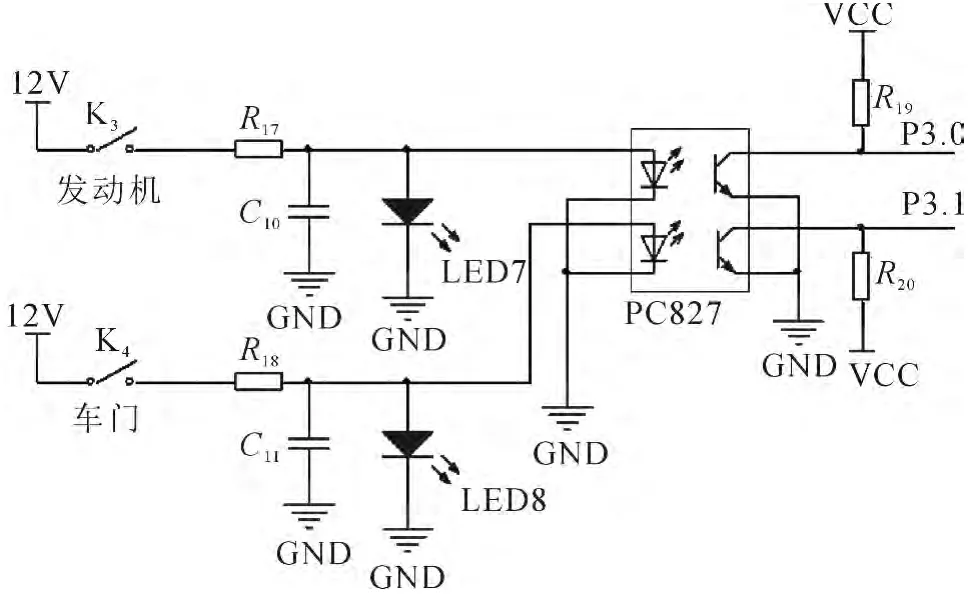
图5 发动机工作状态和车门状态检测电路Fig.5 Engine operating condition and door state detection circuit
2.4 继电器模块
继电器分别控制前照灯的打开和关闭以及远近光灯的自动切换,其电路如图6所示.
光电耦合器和三极管分别对信号进行隔离、放大,驱动继电器工作.系统中并入一个续流二极管,防止继电器释放时线圈两端产生较高的反向感应电动势损坏三极管.本系统的设计是在晚上让前照灯的远光电路一直工作,在会车时远光灯切换近光灯,会车结束远光灯继续工作.
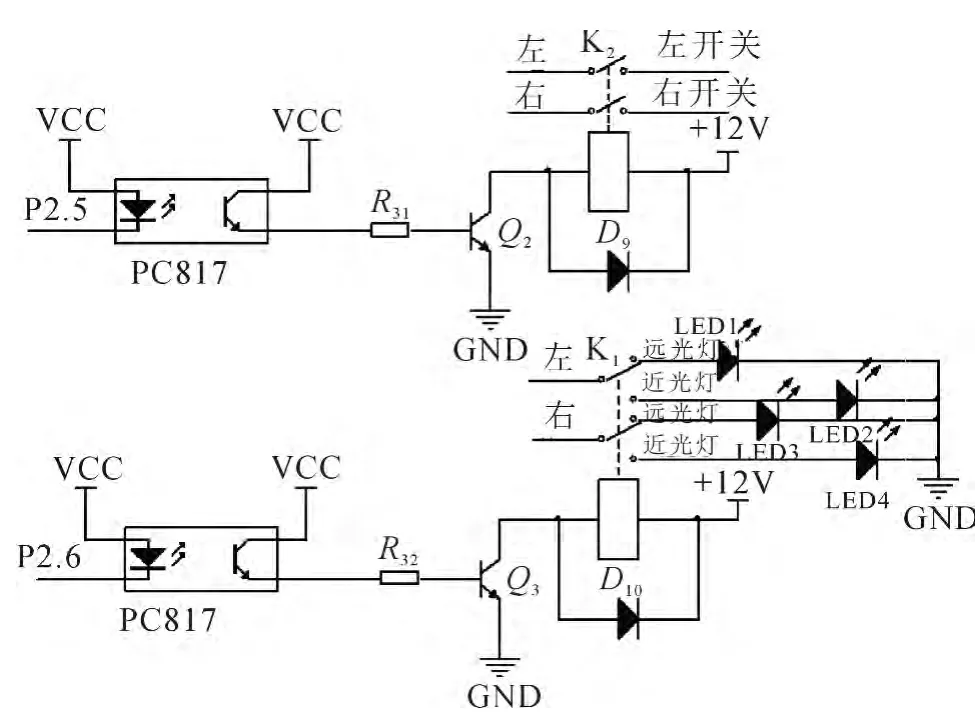
图6 前照灯自动开闭和远近光灯自动切换电路Fig.6 Headlight automatic opening and closing circuit andhigh beam and low beam lights automatic switching circuit
2.5 步进电机驱动模块
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件.系统采用四相六线混合式步进电机,型号为42BYG015,步距角为0.9°或1.8°.系统步进电机的控制采用双四拍的方式,当通电顺序为AB→BC→CD→DA→AB时,步进电机正转;当通电顺序为BA→AD→DC→CB→BA时,步进电机反转.本系统采用步进电机专用控制器L297和双H桥驱动芯片L298N来完成步进电机驱动电路的设计.步进电机驱动电路如图7所示.
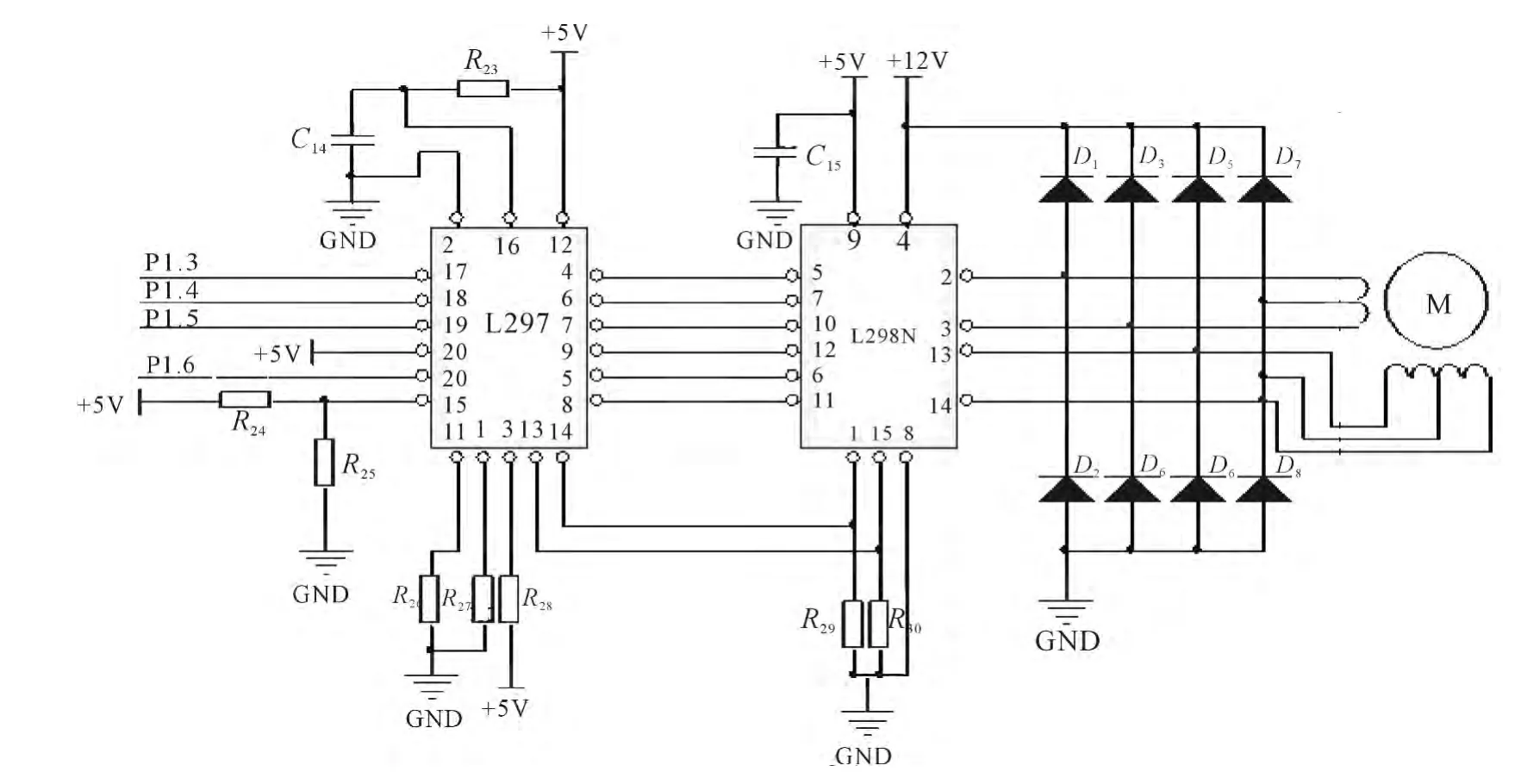
图7 步进电机驱动电路Fig.7 Stepper motor drive circuit
2.6 CAN控制模块
2.7 电源模块
汽车上的蓄电池输出电压为+12V,电源经三端稳压管LM7805稳压,将电压稳定在 +5V供单片机控制电路使用.
3 系统软件设计
由于汽车行驶时道路情况、行车参数变化较快,软件设计主要要求功能的可靠性和准确性,根据控制的主要功能,车灯控制系统运行时,以前照灯控制为主.采用C语言编程,程序全部实现模块化设计,按照系统所能实现的功能,将系统程序分为几个模块:主程序模块、前照灯自动开闭子程序模块、会车自动变光子程序模块、前照灯水平偏转子程序模块、前照灯延迟关闭子程序模块、故障检测子程序模块.系统上电初始化时,定义系统所使用的各个变量,同时将内存清零、设置计数器初始值.系统不断地对各个程序进行扫描和检测,实现系统各个模块的功能。电流传感器检测线路中电流信号,当电流变化值大于或者等于10%时,蜂鸣器报警,当电流变化值小于10%时,发动机开启,前照灯自动开闭子程序模块、会车自动变光子程序模块、前照灯水平偏转子程序模块开始工作,当夜间汽车停车,发动机停止且车门打开时,前照灯延迟关闭子程序模块开始工作,开启延时照明功能,延迟10s,延迟结束后,前照灯关闭,系统停止工作.
4 系统模糊控制策略
4.1 输入输出论域以及量化因子的确定
前照灯转动角度模糊控制器的输入是将速度传感器、方向盘转角传感器检测到的信号模糊化,将精确量模拟成所能感知的大中小模糊矢量[7].论文确定输入变量为车速v和方向盘转角φ,输出为车灯偏转角度θ.其基本论域确定如下
① 车速基本论域:由实际行车经验可得汽车转弯时速度一般低于直线行驶时速度,根据车辆右转弯速度的预报方法研究表明,85%的车辆转弯速度是27.4~46.7km·h-1.取速度的基本论域为[0,50],将其量化为9个等级{0,1,2,3,4,5,6,7,8},车速的量化因子k1=8/50=0.16.偏差语言变量取5个,即{VS(很小),S(小),M(中),B(大),VB(很大)}.实际检测到的车速与量化论域车速的关系式为

② 方向盘基本论域:方向盘的转角为±900°,取方向盘转角的基本论域为[-900°,+900°],量化为13个等级{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},方向盘转角量化因子k2=6/900=0.007.偏差语言变量为7个,即{NB(负大)、NM(负中)、NS(负小)、ZE(零)、PS(正小)、PM(正中)、PB(正大)}.实际检测到的方向盘转角与量化论域方向盘转角关系为

③前照灯转动角度基本论域:取车灯水平偏转角度范围为[-30°,+30°],将其量化为13个等级{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},转角的量化因子k3=30/6=5.偏差语言变量为7个,即{NB (负大)、NM(负中)、NS(负小)、ZE(零)、PS(正小)、PM(正中)、PB(正大)}.
4.2 模糊控制规则的确定
模糊控制规则是操作员总结控制经验,得出的模糊条件语句的集合,它是模糊控制器的核心.本系统中方向盘转角是控制车灯偏转的主要因素,对车灯手动控制经验的总结,得出一组模糊控制规则表,见表1.
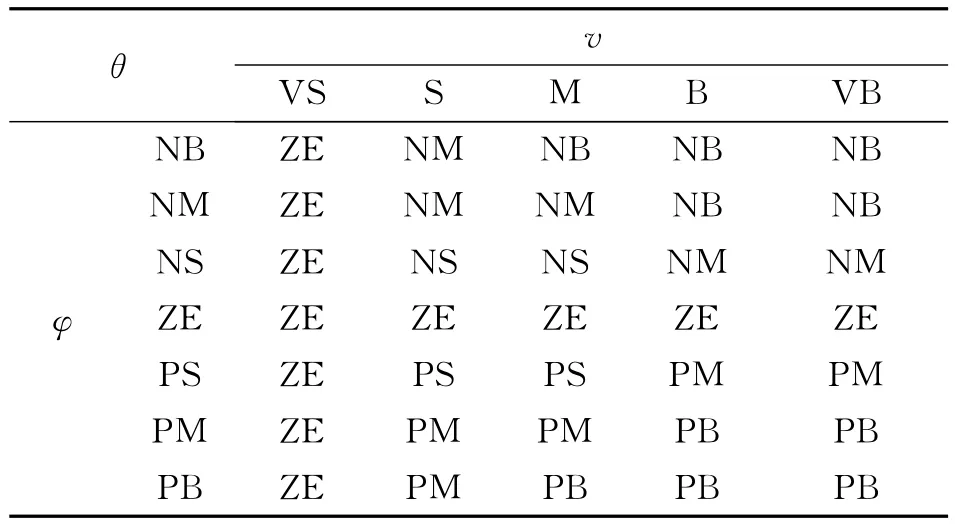
表1 模糊控制规则表Tab.1 Fuzzy control rule table
利用Matlab模糊控制工具箱,将规则表导入到模糊控制系统中,其规则观察器、输入输出曲面关系,分别如图8~9所示.
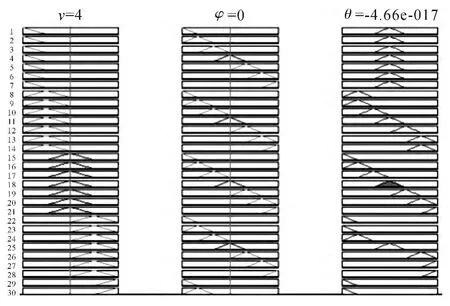
图8 模糊规则查看器Fig.8 Fuzzy rule viewer
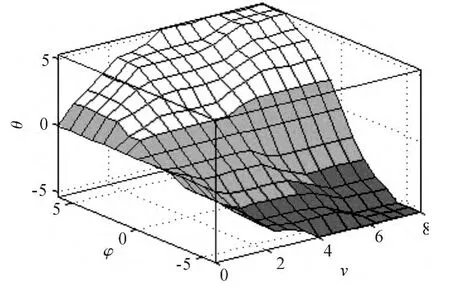
图9 模糊推理输入输出曲面Fig.9 Input and output surfaces of fuzzy inference
4.3 模糊控制表的建立
文中选用 Mamdani控制规则为模糊控制规则.建立模糊控制推理语句
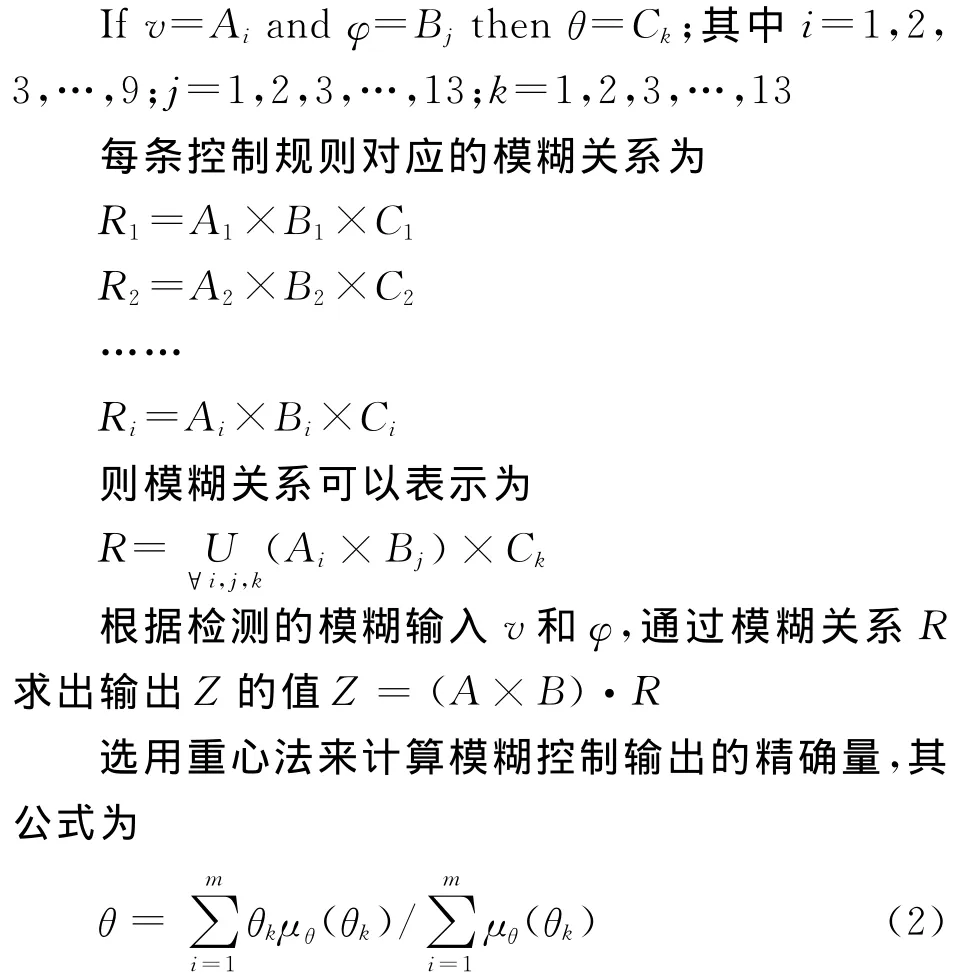
式中:μθ为模糊控制隶属度函数值;θk为模糊输出值.
对输入空间论域中的全部组合计算出相应的输出控制量,可以得到一个实时查询的控制表,见表2.
4.4 输出量的清晰化
需要把模糊控制表得到的输出值去模糊化,变成实际的控制量.根据模糊控制表得到模糊输出量论域上的值,并且转化为系统实际所需控制量φS=K3φN=5φN.
表2 模糊控制表Tab.2 Fuzzy Control Table
5 仿真测试
5.1 仿真环境
通过Keil软件和Proteus软件联合实现仿真.在Keil 2中编写程序源代码并且进行调试产生HEX文件,在Protues画出每个模块的原理图,由于Protues中没有该系统单片机,系统单片机AT89C51CC01是Atmel公司成产的一种八位微控制器,与8051系列单片机兼容,因此选用AT89C51单片机,设置控制器的晶振频率为11.0592Hz,将生成的源代码导入到单片机中,进行仿真,验证系统的可行性.
5.2 仿真结果及分析
在Protues中对步进电机进行交替的正转和反转控制,测试前照灯能否实现左右偏转,仿真原理图如图10所示.
图10 步进电机Protues仿真原理图Fig.10 Simulation schematic of stepper motor protues
由Protues自带的虚拟示波器观察加在步进电机各相绕组上的脉冲控制信号的顺序,可以看出加在步进电机每一相绕组上的脉冲控制信号可以判断和预期的效果是否一致.仿真结果如图11~12所示.由仿真结果可以得到步进电机正转及反转励磁状态,见表3~4.
通过测试可知,文中所设计的步进电机原理图,以及编写的步进电机驱动程序,可以实现对步进电机的预期控制,从而实现前照灯的水平偏转.接下来对每一个模块在Protues中进行系统仿真和调试,最后在实物中调试,实现预期效果.

图12 步进电机反转Fig.12 Reverse rotation of stepper motor

表3 步进电机正转励磁状态表Tab.3 Stepper motor forward excitation state table
表4 步进电机反转励磁状态表Tab.4 Stepper motor reverse excitation state table
6 结 论
文中将模糊逻辑推理应用到系统控制中,方向盘转角和车速作为控制器的输入,车灯偏转角度作为控制系统的输出,实现了对前照灯水平偏转的控制,通过Protues软件进行系统的软硬件协同仿真验证,LED前照灯智能控制系统解决了传统汽车照明系统手动控制的弊端,实现了前照灯的自动开闭,远近光灯自动切换,前照灯随动转弯等各种功能,系统性能稳定、结构简单、可靠性高,可广泛应用.由于目前模糊控制规则和隶属度函数完全由经验来制定,所以进一步优化控制规则和隶属度函数为下一步工作的重点.
[1] 周求湛,吴丹娥,王淼石,等.基于微控制器的新型智能车灯控制系统的设计与实现[J].吉林大学学报:工学版,2009,39(2):480.ZHOU Qiu-zhan,WU Dan-e,WANG Miao-shi,et al.Design and Implementation of Novel Intelligent Lighting Control System Based on Micro-control Unit[J].Journal of Jilin University Engineering and Technology Edition,2009,39(2):480.(in Chinese)
[2] 曹民,丁坤,肖文秀.外部车灯智能控制系统的设计及试验[J].上海交通大学学报,2008,42(4):548.CAO Min,DING Kun,XIAO Wen-xiu.Design of and Experiment on the Intellignet Control System for External Vehicle Lamps[J].Journal of Shanghai Jiaotong University,2008,42(4):548.(in Chinese)
[3] 张国亚,钱新恩,程耕国,等.基于模糊控制的智能车转向控制仿真研究[J].湖工业学院学报,2008,22(1):26.ZHANG Guo-ya,QIAN Xin-en,CHENG Geng-guo,et al.The Simulation Study of Intelligent Vehicle Steering Control Based on Fuzzy Control[J].Journal of Hubei Technology University,2008,22(1):26.(in Chinese)
[4] 张新,黄生豪,高洁.AFS自适应汽车前大灯模糊控制系统设计[J].长沙理工大学学报,2014,11(2):67.ZHANG Xin,HUANG Sheng-hao,GAO Jie.Fuzzy Control Design of the Adaptive Front-Light System[J].Journal of Changsha University of Science and Technology,2014,11(2):67.(in Chinese)
[5] 杨财,周艳霞.方向盘转角传感器研究进展[J].传感器与微系统,2007,26(11):1.YANG Cai,ZHOU Yan-xia.Research Development of Steering Wheel Angle Sensor[J].Transducer and Microsystem Technologies,2007,26(11):1.(in Chinese)
[6] 倪彰,范鑫,潘茂辉,等.基于CAN总线的电动汽车车灯控制系统设计[J].传感器与微系统,2011,30(12):82.NI Zhang,FAN Xin,PAN Mao-hui,et al.Design of Electric Vehicle Light Control System Based on CAN-Bus[J].Transducer and Microsystem Technologies,2011,30(12):82.(in Chinese)
[7] 谭宝成,程智远,牟云霞,等.移动机器人模糊控制系统的设计[J].西安工业大学学报,2007,27(4):366.TAN Bao-cheng,CHENG Zhi-yuan,MOU Yun-xia,et al.Design of Mobile Robot Control System Based on Fuzzy Control[J].Journal of Xi’an Technological University,2007,27(4):366.(in Chinese)
猜你喜欢
电子制作(2019年16期)2019-09-27
汽车维护与修理(2018年7期)2018-10-13
知识经济·中国直销(2018年3期)2018-04-12
传媒评论(2017年8期)2017-11-08
汽车维护与修理(2016年4期)2016-11-26
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
汽车零部件(2014年5期)2014-11-11
清风(2014年10期)2014-09-08