
野外炮管擦拭系统机构研制
2014-12-31 11:08杨立峰王川川姜名义刘薇娜马俊英
机械工程与自动化 2014年5期
杨立峰,王川川,姜名义,刘薇娜,马俊英
(1.长春理工大学 机电工程学院,吉林 长春 130400;2.中国人民解放军63853部队,吉林 白城 137000)
0 引言
当野外火炮射击完成后,对火炮保养维护的一个非常重要的环节就是擦炮。擦炮的主要目的就是清除炮管的火药残渣和灰烬,也是对炮管内膛进行润滑涂油保护。在野外擦拭环境恶劣,人工擦拭困难,要将火炮运回基地才能完成擦炮,这样既费时又费力。所以就需要设计一台野外自动擦拭机构,在节省大量人力物力的同时,擦拭质量也能得到保障。
1 擦拭系统的主要结构
本文设计的野外炮管擦拭机主要由运动结构、传动结构、电气控制结构和炮刷组成[1]。擦拭机的三维结构简图如图1所示。
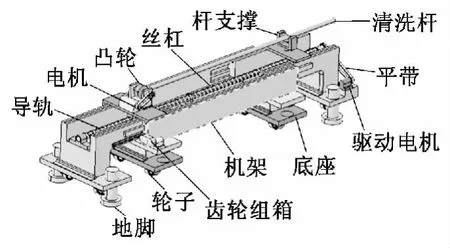
图1 擦拭机的三维结构简图
1.1 运动结构
运动结构用于将擦拭机运到野外作业区域。运动结构装置主要由机架及轮子组成,机架采用伸缩式机构,极大地缩减了机器的外形尺寸,同时也给运输带来了方便。
1.2 传动结构
传动结构主要是由平带和丝杠螺母副组成,通过带传动将电动机的旋转运动转化为丝杠的转动,再通过丝杠转动带动螺母水平运动。为使炮刷实现往复运动,采用了凸轮传动。机架材料选用45号钢[2],装置轻巧便携。
1.3 电气控制结构
本文设计的炮管擦拭机构的控制系统主要由单片机、传感器、光电隔离器等组成。通过控制系统和机械结构系统组成完整的炮管擦拭机构系统。在野外作战时,需要及时对炮管进行高速快效的擦洗,炮管擦拭机器人的主要目标是擦洗速度和擦拭效果,所以炮管擦拭机器人需要设计一个简洁高效的主控系统,通过数显功能,只需按动几个按钮就可以轻松完成擦拭任务。电气控制系统逻辑关系如图2所示。

图2 电气控制系统逻辑关系
1.4 炮刷
炮刷主要用于对炮管的擦拭。炮刷安置在清洗杆上,为达到不同炮管长度的擦拭要求,清洗杆采用伞式伸缩式结构,可以在伸缩一段长度后自己锁定。炮刷设计成组合式,通过螺纹连接,这样既能达到擦拭不同长度炮管的要求,同时也给换头、拆卸带来方便。炮刷内部结构示意图如图3所示。
2 擦拭系统的工作原理及特点
2.1 工作原理
擦拭系统在野外工作时,首先要用机动车将擦拭机拉到野外,选择合适的地点将擦拭机放置在地面上,并将发电机及电缆线接好。待准备工作完成后,启动电源开关,在直流电动机的驱动下,通过齿轮齿条传动装置带动机架伸缩,待机架伸到一定长度后,用定位销将机架固定,再通过机架底部的4个地脚调整擦拭机的高度。调整工作做好以后,启动传动装置电源开关,传动电机开始工作,通过减速器实现降速[3]。传动装置采用丝杠螺母副结构,将丝杠的螺旋转动转化为螺母的水平移动,螺母副上安有凸轮结构,以此实现炮杆的往复直线运动。清洗杆上安装有位置传感器,用来反映炮刷头在炮管中的位置。电气控制系统通过位置传感器反馈回来的位置信号对电动机进行旋转方向的控制,以达到刷头一直在炮管内的正确位置来回运动,确保擦拭清洁干净。

图3 炮刷内部结构示意图
2.2 工作特点
本文设计的擦拭系统具有如下特点:
(1)结构简单、安装迅捷、携带方便。擦拭机可以满足不同炮管长度的需求,同时特殊结构的刷头能使擦拭效果更加理想。
(2)自动化程度高。采用了电气控制系统,通过数字显示屏能轻松地知道擦拭进程,同时能实现手动和自动交互擦拭。操作容易、方便,而且擦拭效果好。
3 擦拭系统设计要点
3.1 传动结构的设计
擦拭机的机架伸缩机构采用齿轮齿条传动,齿轮齿条传动平稳,传动效果好,齿轮材料选择青铜。丝杠螺母副的传动采用带式传动,通过带轮带动丝杠转动,再通过丝杠转动带动螺母副做水平移动,最后通过凸轮机构实现擦拭杆的往复直线运动[4]。
3.2 电气控制系统的设计
电气控制系统采用自动和手动两种方式。通过手动方式可以随时自由地调节炮刷在炮管内的位置,也给维护带来方便。自动方式通过各种传感器反馈回来的信号控制电动机旋转,使炮刷在炮管内做往复直线运动,以满足预期的擦拭效果[5]。
4 主要部件的有限元分析
底架支座是整个机构的支撑系统,所受压力是最大的,其稳定性和安全性直接关系到整个机构的性能,故要对底架支座进行有限元分析[6]。底架支座受力最大的是中间部分,由于两边都有支撑结构,因此产生的变形不大,在支座下面有两个连接轴的轴孔,其所承受压力而产生的变形是需要考虑的。为了增大支座的刚度,减少变形量,在支座上设置了加强肋板,在很大程度上增强了其刚度,达到小变形的目的。有限元分析结果如图4、图5所示。由图4、图5可知,底架最大变形为支架中间部分,变形量很小,符合设计要求,故不需做优化设计。
5 结语

图4 支座Y方向的应力云图

图5 支座Y方向的应变云图
本文设计的野外炮管擦拭机构,大大减少了人力的投入,而且携带方便,安装简单快捷,擦拭自动化程度高,擦拭效果好,适用范围广,为现代化作战提供了方便。
[1] 濮良贵.机械设计[M].北京:高等教育出版社,1994.
[2] 申永胜.机械原理教程[M].北京:清华大学出版社,2001.
[3] 庞金录,肖黎明,李宏伟,等.多功能便携式火炮身管内膛擦拭机的设计[J].新技术新工艺,2011(9):138-139.
[4] 王昆,何小柏,汪信远,等.机械设计基础课程设计[M].北京:高等教育出版社,1996.
[5] 黄净.电气控制与可编程序控制器[J].北京:机械工业出版社,2011.
[6] 李黎明.ANSYS有限元分析实用教程[M].北京:清华大学出版社,2005.
猜你喜欢
小学生学习指导(小军迷联盟)(2021年5期)2021-05-21
小学生学习指导·小军迷联盟(2021年5期)2021-01-23
有色金属加工(2020年4期)2020-08-20
思维与智慧·上半月(2020年4期)2020-04-13
思维与智慧(2020年7期)2020-04-09
制造技术与机床(2019年11期)2019-12-04
福建质量管理(2018年20期)2018-11-14
看天下(2017年13期)2017-06-01
深圳职业技术学院学报(2015年5期)2015-11-30
