
重力场下垂直微力发生装置的研究
2014-12-31 11:31高荣慧
合肥工业大学学报(自然科学版) 2014年2期
郑 双, 高荣慧, 王 勇
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
0 引 言
随着人类对微观世界的不断探索,微力传感器的运用越来越广泛,研究人员提出不少微力传感器的标定方法,但都达不到高精度的要求,尤其是无法产生精准稳定的微力。例如:砝码重锤式[1-2]产生微力受滑轮、细线的摩擦影响较大;静电平行板式[3]产生的力值和平板间隙是非线性关系,标定不可靠;利用洛伦兹力[4]产生微力的装置复杂,操作困难;静电梳齿[5]产生微力操作不便,不易固定,制作复杂,不能标定垂直方向力;Helmholtz线圈[6]产生微力易受地磁场的影响,只能在特殊环境中使用;文献[7]利用压电陶瓷驱动器提供的一套单晶硅微悬臂梁和平板探针产生微力也能达到μN级,但是这种方法先测量微悬臂梁的位移,再利用弹性系数间接求出,所以不易控制;文献[8]针对的是水平方向的微力,并且未考虑装置自身重力的影响,需要进一步研究。
本文提出的垂直微力发生装置采用二级杠杆进行力缩小,用柔性铰链[9]来连接杠杆和传递力,达到一定的缩小比,能够产生稳定的微力。目前考虑并消除重力场影响的设计很少,而本文设计的微力发生装置加载力的方向为垂直方向,装置自身重心位置对装置的测量和标定产生的影响可能远远大于微力加载的最大量程,因此必须对重力场下装置的性能加以分析。本文在考虑重力场(g=9.8m/s2)影响后,对装置进行改进,最终采用对称配重式的差动结构方案。
1 单侧微力发生装置
1.1 单侧微力发生装置工作原理
单级杠杆机构简单、精确、损耗小,但只能通过增大杠杆的臂长来获得大的缩小比,因此空间使用受限;多级杠杆机构由于级数的增加,传递力的损耗增大,结构复杂,影响因素增多,虽然可获得大的力缩小比,但最终的力缩小精度降低。为此,本文选用二级杠杆机构,如图1所示。

图1 二级杠杆力缩小装置示意图
其中,杠杆ABC与杠杆DEG为2级杠杆,通过过渡杆CD连接,装置的支撑和连接部位B、C、D和E均采用柔性铰链,点A为力的输入端,施加向下的力F,一级杠杆ABC将力F缩小后经过过渡杆CD传递到二级杠杆上,二级杠杆将力再次缩小并通过输出端G输出力Ft,方向向下。装置参数见表1所列。

表1 装置的尺寸参数 mm
装置的力缩小比为:

1.2 单侧微力发生装置有限元分析
通过三维建模软件Pro/E和有限元分析软件ANSYS分别建立装置的三维模型和有限元模型,如图2所示。
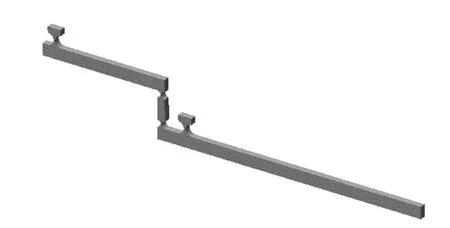
图2 微力发生装置三维模型
单元类型选用20solid186,材料选用Ti合金,泊松比为0.288,弹性模量为107GPa,密度为4.5g/cm3,模型边界约束条件为柔性铰链B、E上表面全约束,在一级杠杆的左输入端加载不同质量的砝码,即加载垂直向下的力,在输出端得到不同的微力,见表2所列。
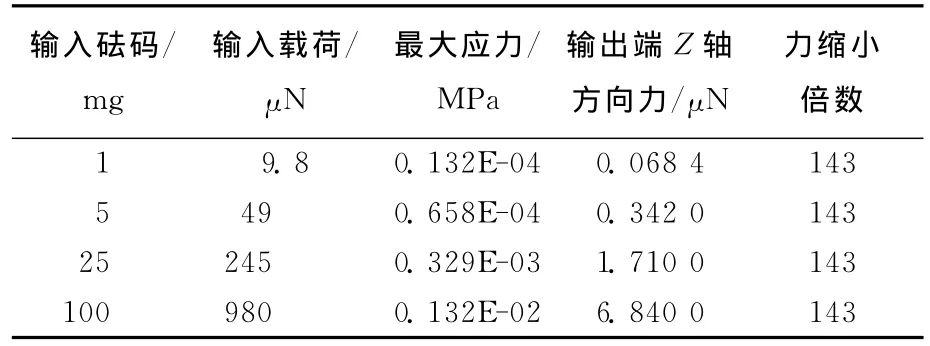
表2 单侧装置不同输入载荷分析结果
结果表明:此装置在输入端加载不同质量的砝码,输出端可以产生稳定的不同微力,力缩小比达到143。
1.3 单侧微力发生装置在重力场下的分析
单侧装置Z方向在重力场下的变形云图如图3所示:
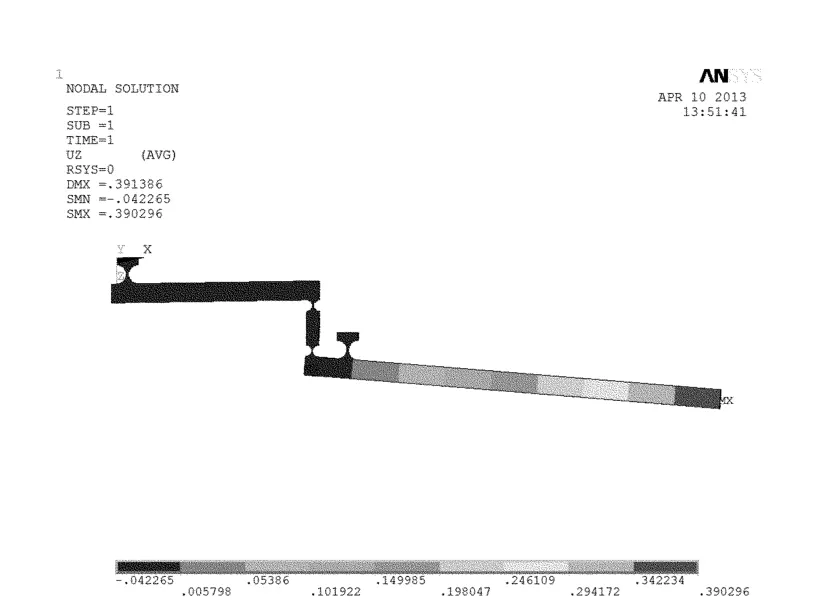
图3 重力场下单侧装置Z方向位移云图
分析可知,在重力场下,单侧装置输出端位移达到391μm,输出端支反力达到0.470 7N,位移偏移量远远超出不考虑重力时的输出位移,产生的垂直方向力也远远大于μN级别,因此必须改进装置的结构来消除重力影响。
2 微力发生装置的改进
2.1 二级对称差动式装置
改进后的二级对称差动式微力发生装置模型图如图4所示,二级对称差动式微力发生装置在重力场下的变形云图如图5所示。
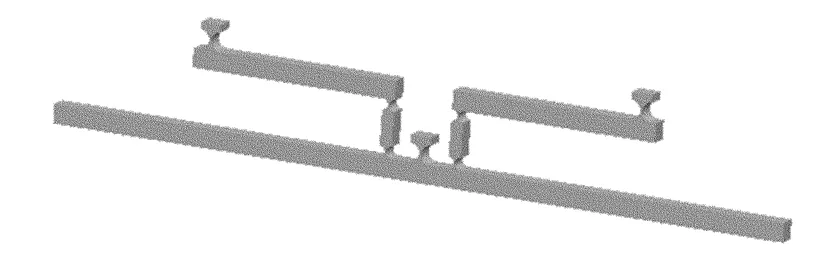
图4 二级对称差动式微力发生装置模型图
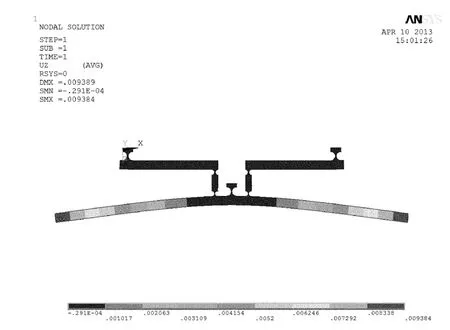
图5 重力场下二级对称差动式微力发生装置变形云图
分析可知:二级对称差动式发生装置输出端最大输出位移为9.4μm,与单侧装置相比,下降了97.6%,输出端支反力为0.125 18N,与单侧装置相比,下降了73.4%,有效减小了重力影响。
2.2 配重块式装置
二级对称差动式装置有效地减小了自身重力对装置的影响,但是二级杠杆对称布置时尺寸太大,需要进一步改进。根据力矩平衡和对称结构的原理,采用配重块代替装置的对称布置,经计算确定了二级杠杆所需配重块质量,配重后的模型如图6所示。
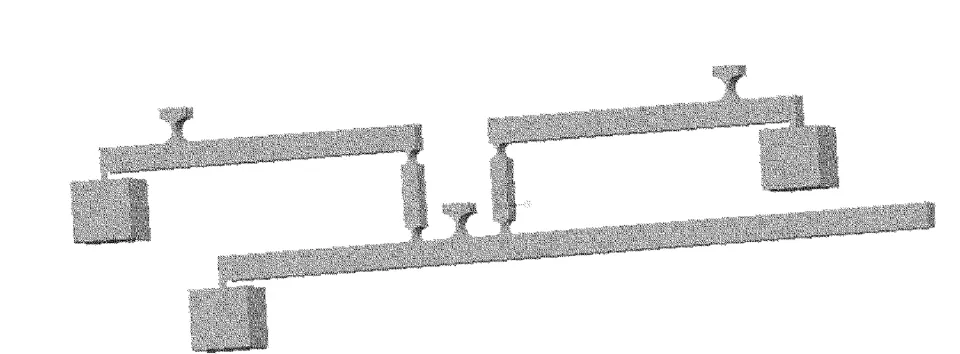
图6 配重块式模型
经有限元分析,此配重块式装置在重力场下的变形云图如图7所示。
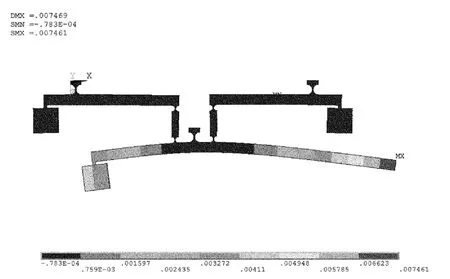
图7 配重块式装置在重力场下的变形云图
分析可知,二级对称差动式配重设计的微力缩小装置在重力场下输出端位移为7.469μm,与二级杠杆对称式布置装置相比,最大位移偏移下降了20.5%,与单侧装置相比下降了98.09%,基本消除了装置的自身重力影响;输出端在约束情况下输出的支反力为0.121 8N,与单侧装置相比,输出支反力下降了74.1%,有效减小了重力对微力缩小比的影响;整个机构最大应力为0.685 734MPa,满足材料的强度要求。
3 垂直微力发生装置的分析
对称配重差动式垂直微力发生装置的示意图如图8所示。

图8 对称配重差动式装置示意图
装置参数见表3所列。

表3 改进后装置的尺寸参数 mm
通过三维建模软件Pro/E和有限元分析软件ANSYS分别建立装置的三维模型和有限元模型,经过约束和加载不同载荷后,得到输出端不同的微力,结果见表4所列。对比表2和表4可见,改进后装置不仅基本消除了自身重力的影响,装置的力缩小倍数也增大了,所以,装置的改进是成功的。
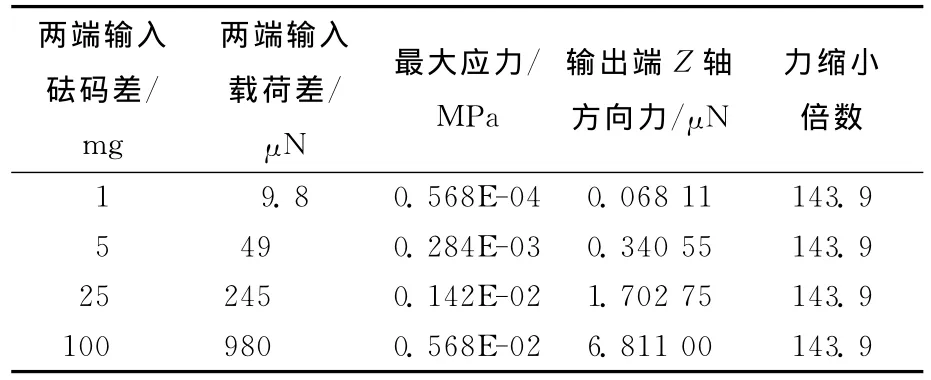
表4 改进后装置不同输入载荷分析结果
4 结束语
本文设计了一种垂直微力发生装置,此装置采用二级杠杆力缩小原理,通过在输出端约束不同大小的位移就可以将现有的砝码力进行缩小,得到不同的稳定的μN级力;并且此装置利用对称配重的差动式结构消除了重力场的影响。此设计为微力的产生提供了一种新方法,并且结构简单、操作方便、价格低廉、量程大,可广泛应用于各种需要微力的场合,有良好的发展前景。
[1] 杨 磊,高晓辉.微型五维指尖力/力矩传感器的研究[J].机器人,2003,25(2):143-146.
[2] 徐科军,朱志能,李 成,等.六维腕力传感器阶跃响应的实验建模[J].机器人,2000,22(4):251-257.
[3] Kim C J.Silicon electromechanical microgrippers:design,fabrication and testing[D].Univ Calif,Berkeley,CA,1991.
[4] Jin Wenlin,Mote C D,Jr.On the calibration of multicomponent microforce sensors[J].Journal of Microelectromechanical Systems,1998,7(2):156-163.
[5] Chu W H.Microfabricated tweezers with al arge gripping force and a large range of motion[D].Western Reserve Univ,1994.
[6] 郭 琪,邹志纯.三种提供微力装置的模型[J].西安邮电学院学报,2009,14(1):149-152.
[7] Li Xide,Su Dongchuan,Zhang Zhao.A novel technique of microforce sensing and loading[J].Sensors and Actuators,2009,153(1):13-23.
[8] 孙敬慧.三维流速传感器力标定系统的研究[D].合肥:合肥工业大学,2011.
[9] 杜志江,董 为,孙立宁.柔性铰链及其在精密并联机器人中的应 用 [J].哈 尔 滨 工 业 大 学 学 报,2006,38(9):1469-1478.
猜你喜欢
减速顶与调速技术(2020年2期)2020-11-16
中国惯性技术学报(2019年6期)2019-03-04
中成药(2018年7期)2018-08-04
测绘工程(2018年7期)2018-07-23
测绘科学与工程(2017年1期)2017-05-04
电子制作(2017年10期)2017-04-18
电子制作(2017年23期)2017-02-02
中国卫生标准管理(2015年6期)2016-01-14
中外医疗(2015年16期)2016-01-04
新高考·高一物理(2015年6期)2015-09-28
