
欧姆接触式RF MEMS开关设计与仿真*
2014-12-31 12:19李向光黄钦文王蕴辉
传感器与微系统 2014年2期
李向光,黄钦文,王蕴辉
(1.电子元器件可靠性物理及其应用技术重点实验室,
广东广州 530610;2.中北大学信息与通信工程学院,山西 太原 030051)
0 引言
微机械开关是最早开始研究的RF MEMS器件,经过近20年的研究,在设计、制造、可靠性等方面都已取得了很大的进展,是最有希望实现实际应用的RF MEMS器件之一。MEMS开关利用微机械结构的动作实现开关状态的切换,具有插入损耗低、隔离度高、信号截止频率高以及功耗小等优点。RF MEMS开关能够实现移相器阵列[1]、信道选择、可变滤波器、接收器等,可广泛用于雷达、汽车雷达、卫星通信、无线通信等领域。
欧姆接触式开关在低频和直流时插入损耗很低,在20~40GHz范围内绝缘性能较好[2];一般用作串联开关。Petersen K E[3]最早提出了基于硅悬臂梁和薄Au层的接触式MEMS开关;但为了在微波范围内追求更低的插入损耗,常用金属材料来构成开关的机械结构。由于Au具有很高的导电性和抗腐蚀性,并且易于变形,阻抗低,熔点高,因此,成为MEMS开关中应用最广泛的材料之一。
本文中的开关结构采用双悬臂梁支撑,材料为Au。静电驱动电压是MEMS开关中重要的参数之一,并且驱动电压越低越好,但过低电压很可能导致开关其他性能减退,所以,应综合考虑。谐振频率决定了开关动作的最高频率,只有在控制开关的频率低于其谐振频率时,才不会影响开关的正常工作;可靠性是MEMS开关的重点研究内容之一,而接触式开关中可靠性与金属触头关系密切,本文分析了接触力和接触弹跳,指出它们可能引起的失效模式,为开关设计的优化和可靠性提供依据和参考。
1 开关设计
1.1 工作原理
图1是悬臂式RF MEMS开关的侧面和俯视示意图。开关由衬底材料、底电极、机械结构和接触点组成。当施加的驱动电压高于开关的下拉电压时,上电极所在的梁在静电力吸引下向下运动,触点相互接触时形成信号的通路;撤去驱动电压后,梁在机械回复力的作用下回到初始位置。
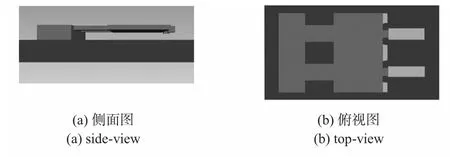
图1MEMS开关示意图Fig 1 Schematic diagram of MEMS switch
1.2 理论分析
对于悬臂梁的回复力(Fs)可近似等效为线性弹簧模型,弹簧的形变量为开关间隙的变化量,可表示为[4]

式中ks为悬臂梁的刚度;E为杨氏模量;g0为开关的初始间隙;g为施加电压后开关的间隙;w,l,t分别为悬臂梁的宽度、长度和厚度。
开关为静电驱动,静电力的方程可表示为

其中,ε为真空介电常数,V为驱动电压,A为静电驱动面积,g为施加电压后开关的间隙。
考虑到平衡位置Fe=Fs,由式(1)和式(2)可得[5]

对式(3)求导,并令导数为0,得到临界点的位置位于g=2g0/3,将其代入式(3)可得到下拉电压为

由下拉电压的表达式可以看出:悬臂梁的刚度越低,下拉电压就会越小;又因为刚度与悬臂梁厚度的三次方呈比例,所以,降低刚度最有效的办法就是减少梁的厚度;但降低厚度又会使开关速度减慢,并且在释放工艺中更易产生粘附现象,所以,应综合考虑多方面的因素。
2 工艺仿真
Au具有良好的电性能和机械性能,所以,本文的开关结构材料为Au;因为MEMS开关一般为悬空的薄梁结构,并且把IC集成作为发展目标,所以,MEMS开关的制造主要利用表面微加工工艺[5],而表面加工的关键是对牺牲层的选择,此外还应考虑到蚀刻速率、内应力、厚度等因素。
详细的工艺流程如图2所示,具体步骤为:1)淀积并刻蚀光刻形成底部金属;2)淀积并刻蚀形成牺牲层;3)淀积结构层,刻蚀形成接触微坑,使导通电极率先接触传输线;4)淀积并刻蚀形成顶部金属层;5)除去牺牲层,释放悬臂梁。

图2 MEMS开关的详细工艺流程Fig 2 Detailed process flow of MEMS switch
3 性能仿真
对于大多数不规则的器件,进行常规的理论分析比较困难,要想精确计算器件的结构、性能,还需解决静电场和机械力的耦合问题[6]。例如:在1.2节中的理论分析是将上下极板简化为平板电容器模型,并且忽略了边缘效应的影响,这个模型仅有助于理解静电激励的工作原理。为获得比较精确结果,仿真则更贴近实际情况。开关的相关参数为:悬臂梁长度为 40 μm,宽度为 30 μm,驱动极板为64 μm ×160 μm,厚度为 3 μm,极板初始间隙为 3 μm,触点为 6 μm ×6 μm,与接触电极的距离为 2 μm。
3.1 驱动电压
图3清楚地反映出随着驱动电压的增大,开关末端的触点由初始位置向下运动,最终与信号传输线接触,开关闭合。此外,在1(39.298 V)~2 μm(44 V)之间,图形的斜率骤增,很好地体现了上述理论分析中关于“下拉”的描述。
3.2 接触力
金属接触是欧姆接触式开关中一个十分关键的问题,因为它与开关的可靠性有直接的关系。本文中开关的材料为Au,Au接触很容易形成较高的粘附力,当回复力不足以使接触断开时就会产生粘附失效。通常MEMS开关中接触力大小在μN~mN的范围内[7]。接触力也是MEMS开关接触模型中一个十分重要的参数。
由图4的结果可以看出:驱动电压为70V时,接触力为22.447 μN开关闭合后,接触力会随着电压的升高而升高,并且可近似为线性关系。

图3 驱动电压Fig 3 Actuation voltage
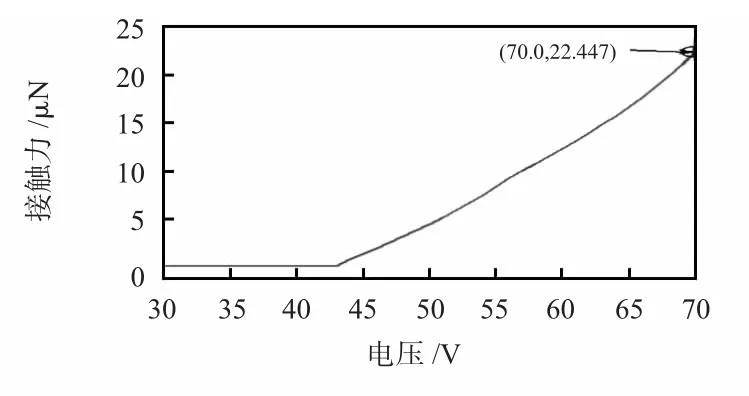
图4 接触力Fig 4 Contact force
3.3 频率响应
对开关进行频率响应的分析在于找出开关的谐振频率,谐振频率决定了开关动作的最高频率,只有在控制开关的频率低于其谐振频率时,才不会影响开关的正常工作。
图5所示的结果是对开关进行1~40 kHz扫频分析时的频率响应,频率为25.5 kHz时出现峰值。

图5 频率响应Fig 5 Frequency response
3.4 开关弹跳与开关时间
如图6(a)所示,开关从开始接触到稳定之前,会来回弹跳多次,文献[8]中通过实验也观察到了该现象。弹跳是由存储于变形的悬臂梁和接触材料中的能量引起的[9]。它会增加开关由闭合到稳定的时间,弹跳过程中有可能造成粘附、接触材料的局部硬化和点状腐蚀等失效模式。压膜阻尼是影响开关弹跳的一个重要因素。Guo Z J等人发现,开关闭合时,阻尼力的大小约为静电力大小的13.5%[10]。
开关的闭合时间很大程度上依赖于驱动电压,驱动电压增大时会降低开关的闭合时间和由闭合到稳定的时间。图6(a)和(b)分别表示驱动电压为50,60 V时开关的闭合情况(驱动电压脉冲延迟为50 μs),由图可知,闭合时间为31.2,27.78 μs,弹跳时间分别为 174.94,66.84 μs,由此可见,通过适当增加电压可以降低弹跳持续时间。但还应注意的是,电压过高也可能会引起驱动极板间的电击穿,引起失效。
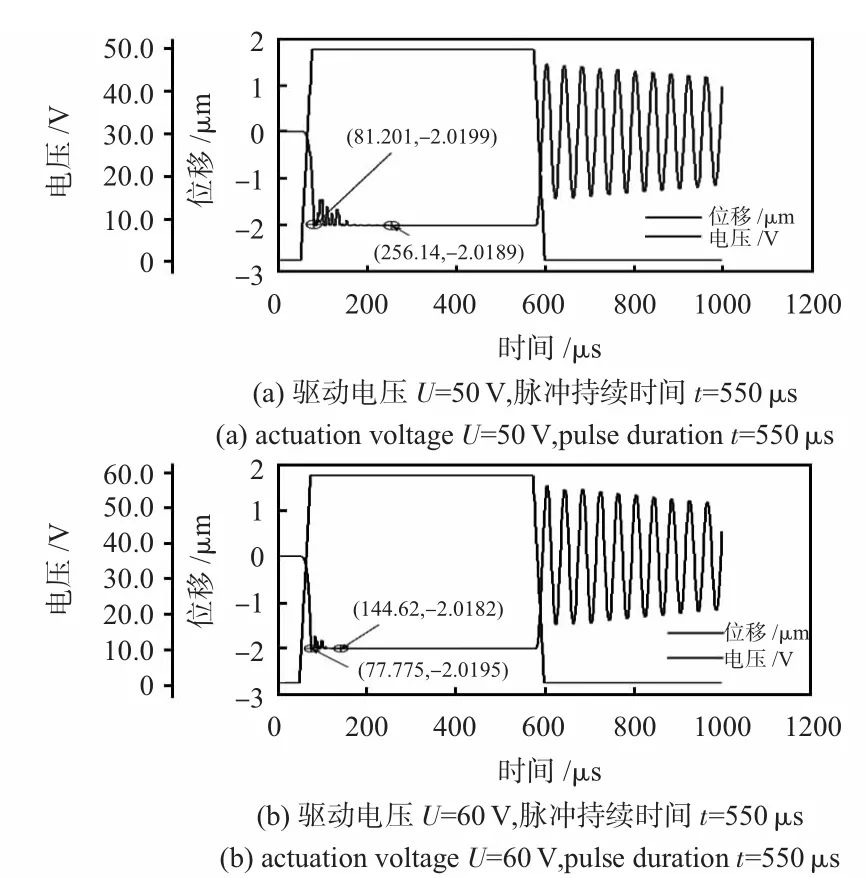
图6 开关弹跳与开关时间Fig 6 Switch bounce and switch time
4 结论
本文通过对驱动电压的理论分析得到,悬臂梁的刚度越低,下拉电压就会越小;又因为刚度与悬臂梁厚度的三次方呈比例,所以,降低刚度最有效的办法就是减少梁的厚度;但降低厚度又会使开关速度减慢,并且在释放工艺中更易产生粘附现象,所以,应综合考虑多方面的因素。针对设计的MEMS开关进行了工艺实验与性能仿真,得到开关的闭合电压为44 V;触点的接触力为22.45 μN;谐振频率为25.5 kHz。开关闭合时,触点接触后并非立即稳定,而是要弹跳数次后才趋于稳定,此现象增加了开关从闭合到稳定的时间,并且在弹跳的过程中还有可能造成粘附、接触材料的局部硬化和点状腐蚀等失效模式。驱动电压分别为50,60V 时开关的弹跳时间分别为174.94,66.84μs,由此可见,通过适当增加电压可有效降低开关时间和由闭合到稳定的时间。但电压过高可能会造成驱动极板间的电击穿,引起失效。
[1]Suzuki K,Chen S,Marumoto T,et al.A micromachined RF microswitch applicable to phased array antennas[J].Microwave Symposium Digest,1999,4:1923-1926.
[2]Rebeiz Gabriel M.RF MEMS:Theory,design and technology[M].New York:Wiley,2003.
[3]Petersen K E.Micromechanical membrane switch on silicon[J].IBM Journal of Research and Development,1979,23(4):376-385.
[4]Liu Bo,Lü Zhiqiu,He Xunjun,et al.Improving performance of the metal-to-metal contact RF MEMS switch with a Pt-Au microspring contact design[J].Journal of Micromechanics and Microengineering,2011,21(6):1-9.
[5]王喆垚.微系统设计与制造[M].北京:清华大学出版社,2008.
[6]郭方敏,赖宗声,朱自强,等.悬臂式RF MEMS开关的设计与研制[J].半导体学报,2003,24(21):1190-1195.
[7]Patton S T,Zabinski J S.Fundamental studies of Au contacts in MEMS RF switches[J].Tribology Letters,2005,18(2):215-230.
[8]Steeneken P G,Rijks Th G S M,Beek J T M Van,et al.Dynamic and squeeze film gas damping of a capacitive RF MEMS switch[J].J Micromech Microeng,2005,15(1):176-184.
[9]Brown Christopher John.Impact of environmental conditions on the contact physics of gold contact RF MEMS switches[D].Raleigh:North Carolina State University,2008.
[10]Guo Z J,McGruer N E,Adams G G.Modeling,simulation and measurement of the dynamic performance of an ohmic contact,electrostatically actuated RF MEMS switch[J].J Micromech Microeng,2007,17(9):1899-1909.
猜你喜欢
武汉广播影视(2022年6期)2022-12-28
石油管材与仪器(2020年5期)2020-11-05
军民两用技术与产品(2020年8期)2020-09-07
山东工业技术(2019年13期)2019-05-30
消费导刊(2018年8期)2018-05-25
制造技术与机床(2017年8期)2017-11-27
中学生数理化·高二版(2016年10期)2016-12-24
光学精密工程(2016年5期)2016-11-07
锻压装备与制造技术(2016年3期)2016-06-05
电源技术(2015年9期)2015-06-05
