
运动的声音设计与制作
2014-12-25 02:18:52李晟
太原学院学报(社会科学版) 2014年1期
李 晟
(山西省音乐舞蹈曲艺研究所,山西太原030001)
1 电影的空间·运动
1.1 电影
电影是根据“视觉暂留”原理,运用照相(以及录音)手段,把外界事物的影像(以及录音)摄录在胶片上,通过放映(以及还音),在银幕上造成活动影像(以及声音),以表现一定内容的技术[1]。声音和影像都有其固有的表达意义的方式,而且二者之间存在着差异性和共通性。声音和影像的传播形式分别是声波和光波。声音和影像的共同体可称之为视听语言,它通过摄像机和录音机等中介物由主体向客体传达某种特定信息,表达某种特定意义。视听语言第一次无限地接近了客观现实,是人发挥主观能动性使用媒介对现实的仿生再创造,并进而作用于人体的视听感官——眼睛和耳朵的一种现象。声音和影像在表达意义之前,客观上需要一个存储(记录)载体,这就是视听媒介。视听媒介高保真的特征,使得视听语言具有很强的说服威力。记录下来的声音和画面信息可以被多次利用,并在一定时间内(受限于物理存储媒介的寿命)保持信息的恒定不变”。[2]电影新浪潮之父安德烈·巴赞为我们揭示的关于电影起源心理学的基本观点:即电影发明的心理依据,是再现完整声、色、主体感受一应俱全的现实的幻想。电影作为第七艺术,是为了完成人类追求对现实事物的复现而出现的产物,即对时间与空间进行处理得出的产物。
1.2 电影的空间
电影与空间变化有关,影像所投射出去的银幕是平面的,就像照片和图画一样,构图都是在一个框中,所以电影的画面是被限制在一个画框中的。电影画面是通过电影摄影来完成的,摄影镜头所能够拍摄下来的景物大小也是有限的,要想在这有限的画面空间内获取更多的信息,那么就要借助于电影的另一个重要元素——声音。
伊朗著名的电影导演阿巴斯·基亚罗斯塔米(Abbas Kiarotami)曾指出:“对我来说声音非常重要,比画面更重要。”[3]画面作为二维平面所能表现的空间范围是有限的,但是声音的出现可以突破画框的限制,弥补画面的不足,用画外音源的声音对画面场景进行补充,甚至可以延伸到银幕外的空间。电影银幕是一个二维的画面,但电影用来表现空间立体感的主要手段就是用声音实现的。
1.3 电影的空间中运动的声音
声音可以产生出一个真实空间环境,它能表现出强大的空间立体感。一般声音的空间感主要反映在声音的环境感、透视感、方向感这三个方面,如果要更加真实地表现出声音的空间感,就要使声音具有立体感。①声音的立体感,即听者对发声体在某一可中相对位置的感受。通常发声体在同一空间的位置变化,会使其声音产生强度差、时间差并引起直达声与房间混响声的比例等因素的变化,由此听者可以确定发声体在空间的相对位置。发声体在空间中的相对位置、发声体与听者的相对距离和发声体的运动特性(运动轨迹,速度,方向等)等都需要相对准确的体现出来。
一个三维空间中,可被分为:横向、纵向、深度三个方向,相对应到三维空间中的声音亦是同理。这样一来,在一个空间中看似复杂的运动的声音就可以简化为三个方向上的线性运动的合成。
2 横向运动的声音
2.1 双声道立体声还音系统
要解释定位,首先要说说声像。所谓声像,就是音响系统再现出来的声源,经人耳接收、大脑加工后,虚拟出来的发声源在空间的像。因此,定位其实就是对声像的定位。而由声像所构成的空间,我们就叫做声场。
那么,人耳是如何对声音进行定位呢?
在自由声场①自由声场:声音的传播不受任何阻隔,可以任意远。中,听觉的方位感受主要是依靠双耳间的时间差和声级差完成的。
如图,在双耳的水平面上有一声源,到达两耳的距离分别是tL·c和tR·c,tL和tR分别是声源到达双耳的所需的时间,c为声速。可以看出,左右耳接受声信号一定存在着一定的时间差:
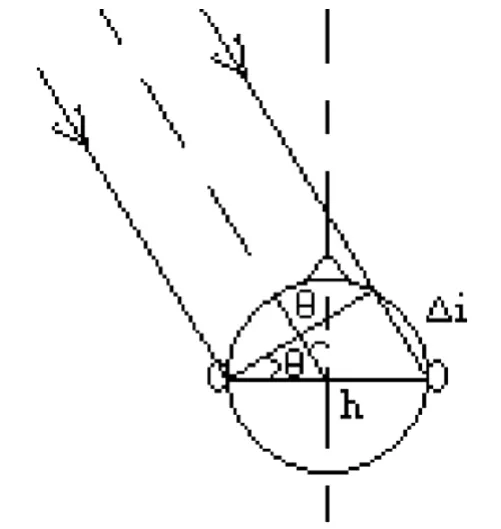
Δt正是由于Δi(Δi=tL·c-tR·c)引起的,可见
假设人头就是一个球体,设其直径为h,则
那么,两耳之间的时间差
或者说,两耳间的相位差
由此,听觉的水平方向的方位感受主要是由于两耳间的时间差和声级差来形成的,此外还有其他的一些因素:
声音的低频分量由于时间差产生的到达两耳的相位差:声音以波的形式在空气中振动传播。在不同位置上,声波的位置也不相同(当相差波长整数倍时除外)。人的两耳分布在头颅的两侧,中间存在一定的距离,因此声波到达人耳的相位也会有所不同。这个相位差也是人们判断声源方位的因素之一。其中,随着频率的逐渐提高,声音到达人的两耳时的相位差相同的可能性就越来越高,因此低频声音的相位差在声像定位上的作用大于高频声音,频率越低,相位差在声像定位上所起的作用就越明显。
声音由于人的头部对高频分量的遮蔽作用产生的到达两耳的音色差:处于人的头颅两侧的双耳,由于头部对声音的掩蔽作用,使得双耳间产生音色差。因为不同频率的声音,对于障碍物有着不同的绕射能力,因此,声音绕射过头部分别到达两耳时不同的频率的分量所产生的声级差也是不同,频率越高的声音分量的绕射能力越差,到达距离声源较远的人耳时衰减的也就越厉害。只要声音不是来自于听者的正前或是正后方,在到达人的两耳时,左耳和右耳所听到的声音就会存在一定的音色差。频率越高,音色差在声像定位上所起的作用也就越明显。
因此可以得出结论[4]303:
A、双耳间的时间差和相位差是低频的水平定位的主要因素;
B、随着频率的升高,双耳间的相位差相同的可能性越来越高,这时,声级差和音色差就成为了水平定位的主要因素;
C、由此可以推论,在某一频率范围内,即这两种主要因素的转变区域,即为双耳对水平定位的模糊区。
2.2 多声道立体声还音系统
2.2.1 多声道环绕声
从原理上,声场空间信息的还原可采用两种不同的方法[5]:方法一,模拟声场的方法,即还原一个与原声场完全一样(或相近)的声场;方法二,听觉错觉的方法,产生与原声场类似的空间听觉。
如果我们直接利用方法一来模拟声场实现环绕声,那么我们必须在三维空间内环绕听者安放极其多的扬声器,并且需要每一个独立信号传输到一个扬声器中,每一个方向上的声源都由对应位置的扬声器还放出来。这样我们才能将所有声源发出的直达声以及混响声准确无误地还放出来,进而准确地模拟出原始声场。可是在实际的环绕声系统中,我们只能采用个数有限的信号传输和还放通路,因而还必须根据心理声学原理对环绕声的系统进行简化。
首先,可通过舍弃部分的声音空间信息,以换取对系统的简化。在媒体的传输或记录容量一定的条件下,对听觉上重要的声音空间信息尽可能保留,而听觉上相对不重要的声音空间信息可以适当舍弃。由于在听觉上,水平面内的声音空间信息较上方重要,因而目前应用的环绕声系统是保留前者舍弃后者,也就是平面环绕声系统。当然,系统的传输与还放通路越多,声音空间信息的损失越少,还原效果越好,但系统越复杂,这是一对矛盾。因此在环绕声的发展过程中,有关系统独立通路数一直是探讨的重要问题之一[6],而目前实际应用的系统是一种折衷的方法,它所还原的仅是声场空间信息的一种粗略近似。
其次,可利用听觉错觉的方法(方法二),在环绕声还放声场与原声场不同(简化)的条件下,得到与原声场类似的主观听觉效果。利用听觉错觉产生主观听觉效果的方法往往较简单,需传输的信息量较少。目前在环绕声系统中常将该原理用于产生空间某一方位的声像的方法如下:在一组水平面内适当布置的扬声器,通过改变馈给它们信号的声级差,使倾听者双耳处的声压和某个方向的单声源的情况近似相同,从而在听觉中产生相应方向的声像。普通的声级差(强度)型双通路立体声系统就利用了这一原理。当然,这种利用错觉产生的声像的自然度可能会降低。
对以上两种方法,模拟声场产生的空间听觉效果固然真实自然,听音区域较宽,但系统较复杂。而听觉错觉方法产生的空间听觉效果虽不如模拟声场的而方法,但系统较为简单,易于操作。
综合上述,目前在电影实际应用的环绕声系统是舍弃部分的声音空间信息的、模拟声场和听觉错觉原混合组成的系统。电影之所以引入环绕声系统,主要还是与画面相配合,达到视听完美结合的目的。由于听者的注意力都集中在前方画面上,对前方的声响稳定性要求相对比较高,所以在节目中的对白也仅仅由前置甚至是中置扬声器重发出来。而侧向和后方的环绕声只作为辅助和衬托的用途出现。
2.2.2 双声道环绕声还音系统对于研究多声道立体声还音系统的意义
双声道立体声系统是其他多声道立体声还音系统的基础。双声道立体声还音系统和现今的多声道立体声还音系统都是用有限数量的扬声器来模拟还原声场空间感的简化方式。双声道立体声还音系统便是在这些简化方式中最简化,最基本的形式。因为一个多声道立体声中的任意两路扬声器声音信号在某种意义上都可以看作是由一对双声道立体声还音系统所还放出来的,也就是说,一个多声道立体声还音系统中的任意两个声道在某种意义上都可以被看作是一对立体声。
所以,研究双声道立体声还音系统是研究多声道立体声还音系统的基础。双声道立体声还音系统中的各种理论原理和实例同样也都适用于多声道立体声还音系统。
根据声级差(ΔL小于15分贝)和时间差(Δt小于3毫秒)之间的相互校正关系,在一定程度上,在制作中可以使用声级差来代替时间差。
2.3 声音设计及分析
对于上述理论,笔者将用两个试验对其加以证明。
实验1:同期拾取一段单声道人声对白,将对白放置到5.1立体声还音系统的中置音箱上,我们可以很准确地判断出声源是从听者正前方所发出的,接下来将这一段对白分别发到左右两只音箱上,且保持两段对白没有时间差和声级差,我们还是能准确地判断出声源是从听者的正前方发出的,最后将发到左边音箱的对白电平提高至大于15dB,右边音箱的电平不变,那么听者感受到声源是从左边发出的。
实验2:模仿动作片中的一个场景,从画面右侧开始打斗,在打斗过程中两人从画面右侧移动到画面左侧。两个演员在画面右侧开始打斗并慢慢移动至画面左侧,拳脚打斗的声音是靠后期在拟音棚中模仿出来的,多声道立体声对这种以观众为圆心做圆周运动的声源表现为单个扬声器音量的变化,当两个演员在画面右侧打斗时,右声道扬声器音量大,左声道扬声器音量小,声相在右;当两个演员向画面左侧运动时,左声道扬声器音量逐渐变大,右声道扬声器音量逐渐变小,声相也从右向左移动;当两个演员在画面正中打斗时,左右声道扬声器音量相等。声相居中。
3 深度方向上运动的声音
3.1 深度定位的原理
深度定位,即是人对于声源与自己的相对距离的判断,也就是声音的距离感。一般认为,在深度定位的机理方面,室内声场要比室外声场的定位因素清楚一些。
相对距离进行判断的主要依据。这种判断尤其是在自己比较熟悉的房间中,会变得更加准确[4]304。当听者距离声源很近的时候,似乎音色的变化是起着主要的作用的。因为在这时,声源所辐射出的球面声波的声强是随着距离的增加而迅速减小的,而与声音的频率几乎无关,但空气质点的振动速度的变化则是与频率有关的,这就为近场范围的距离感提供了依据。
3.2 依靠直达声和反射声的时间差来判断空间大小和声源的位置
当人们进入到一个陌生的房间时,如果先要依靠听觉来判断出房子的大小,那么主要是依靠近次反射声和直达声到达人的两耳的时间差来进行的。
在某一房间时,若是听者的位置固定,那么A点和B点分别是两面墙上的固定两点,我们把声源发出的直达声到听者所需要的时间设为T1,然后把声源发出的声音进过A点所在墙面反射到达听者的时间设为T2,同理把经B点所在前面反射到达听者的时间设为T3,那么它们的时间差分别为t2=|T2-T1|和t3=|T3,那么得出的结论就是t2和t3哪个越大哪个点所在的墙面就离听者越远。由此人们可以通过对两者时间差的分析判断出空间大小。
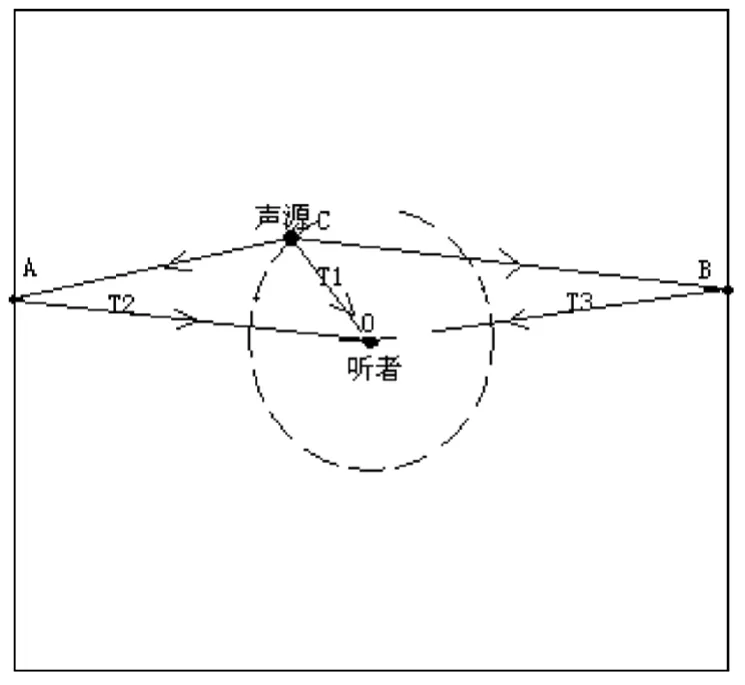
当人们在已知的房间内时,如果依靠听觉来判断声源的位置的话,同样也是要在很大程度上依靠声源所发出的直达声与反射之后的近次反射声到达人耳的时间差来进行判断的。假设这一房间是正方形,听者的听音位置位于正方形屋内的中心点O点处。声源发出的直达声经过时间T1到达听者,而经过A点所在墙壁反射到达听者的反射声经过时间T2到达听者时,声源发出的声音经过B点所在墙壁反射到达听者的反射声经过时间T3到达听者,那么t=|T3-T2|是可知的。
当T3>T2时,则意味着声源发出的声音,经B所在墙面反射一次到达听者的路程比经A点所在墙面反射一次到达听者的路程要长,即|AC|+|AO|<|BC|+|BO|,由于在正方形房间内,听者位于中心点O处,所以|AO|=|BO|,得出|AC|<|BC|,即声源C距离A点所在墙面较近,距离B点所在墙面较远。
当 T2>T3 时,则|AC|+|AO|>|BC|+|BO|,由|AO|=|BO|,得出|AC|>|BC|,即声源C点距离A所在墙面较远,距离B点所在墙面较近。
当T2=T3时,则|AC|+|AO|=|BC|+|BO|,又由|AO|=|BO|,得出|AC|=|BC|,即声源C点距A所在墙面和距B点所在墙面的距离相等。
由此,声源同其他几面墙壁间的位置关系也不难通过推导得出。综合所获得信息,就可以判断出声源在空间中的位置了。
所以,依靠直达声和反射声的时间差也是可以来判断空间大小和声源在空间内的位置的重要依据。
3.3 深度方向上运动的声音的多谱勒效应
当我们站在一片空地时,如果有一架飞机刚好飞过来,我们能感觉到,当飞机由远及近向我们飞来时,飞机引擎所发出的声音的音调会越来越高。当飞机来开我们越来越远的时候,飞机引擎发出的声音的音调又渐渐低下去,也就是从dou到ri,虽然飞机引擎发出的声音的调没有变,但是我们听到的声音确实由高到低;火车鸣笛向我们开来时也有同样的感受。这种现象的规律就叫做多普勒效应,首先总结出这个规律的人是奥地利物理学家多普勒。移动的物体发出的声波或从移动物体反射出的声波都会产生多普勒效应,即如果该移动的物体接近你时声音频率就会升高,移动物体远离你时声音的频率就会降低(如图1所示),当该物体不发生移动时,声音频率不会改变。这就是声音的运动感产生的原因。

图1 多普勒效应产生示意图
因此多普勒效应实质上是指当听者与波源相互接近或远离时都会引起波的变化,从而给听者带来不同的听觉感受。声音是种波,当你与声源之间距离不断靠近时,声波频率会变大,表现为声音音调变高,当声源远离你而去,声波频率会变小,表现为声音音调低沉。
当听者与波源相互接近时,多普勒效应有三种情况(公式中V是人的速度,f是频率,Vo为声速,fo为波源的频率,Vs是波源的运动速度;以向波源方向运动为正):
(1)人不动,声波以速度给Vs运动,则人听到的频率为:
(2)波源不动,人以V运动,则人听到的频率为:
(3)两者皆运动,波源速度为Vs,人速V:
通过上面三种比较我们可以得出这样的结论:当汽车向听者驶来时,听者听到的声音的音调由低到高,当汽车从听者身边向远处驶去时,听者听到的声音的音调恰恰相反。同时我们还能进一步得到:接收者与声源相对位置的变化,会导致同样的声源在接收者听来有不同的效果。接收者与声源相向运动,接收者不动,声源动,以及接收者与声源同向运动,这三种情况下,声音的频率不断减小,声音产生的效果也不一样。
3.4 声音设计及分析
纵深方向上运动声音的定位笔者认为在后期制作中比较难实现,对此也做两个实验进行研究。
实验目的:模仿一辆汽车由远及近的声音运动。
实验1:用同期录制的素材模仿
实验用素材:用一支传声器拾取一段与画面吻合的汽车由远及近完整的声音素材。
结论:虽然该声音素材没有进行加工和剪辑,但是使听者感受到了与画面相吻合的很自然的运动声音。
实验2:对素材进行后期加工和剪辑来模仿
实验用素材:把一支传声器固定到车身外并拾取汽车匀速运动的声音。
实验过程:
利用多普勒效应来模仿汽车由远及近的声音,对这段匀速运动的声音在不同时间进行响度上的变化(由小到大),但由于所学知识的局限笔者无法对每一段时间声音的频率进行准确的计算,所以在修改其频率的变化中不能很准确地进行修改。
结论:在纵向方向上的定位不光是靠响度的变化确定的,还有印第安和音色的变化,所以模仿纵深方向上运动声音的非常复杂,通常是直接拾取纵深方向连续的声音运动,而在后期制作中进行模仿对硬件和软件的要求太高。
4 纵向运动的声音
纵向定位是指人的听觉系统对声源高度的判断,既高度感[4]304。大量研究表明,人的听觉系统对于声源的方向和深度(距离)具有惊人的判断能力,而对其高度的判断能力较差。由于纵向定位的能力较差,所以纵向的定位能力在方位感中居于次要的地位。因此,在本文中不做讨论。
5 总结
电影就是要用视听来真实地还原时空。
多声道立体声还音系统就是用来模拟还原声场空间。从上述中可以看出,一个三维空间中,复杂的运动的声音可以简化为横向、纵向、深度三个方向上的线性运动的合成。而在这三个方向上,人耳纵向定位的能力较差,对横向和深度却非常敏感。所以,在设计和制作上应予以重视。
在横向运动的声音中,通常用时间差和强度差就可以表现出运动感来。而在深度方向上,则需要更多的声音信息,相对于横向运动的声音较为复杂。除了声音强度的变化,在室内需要考虑到直达声、反射声的因素,以及多普勒效应的运用。
然而,在制作中,从声画关系角度考虑,运动的声音的制作更为复杂和多变。本文仅就将复杂运动分解这一角度浅谈了运动的声音。
[1]《电影艺术词典》编辑委员会.电影艺术词典[K].北京:中国电影出版社,1986.
[2]柴伐梯尼.杰作:《温别尔托·D》[C]∥安德烈·巴赞.电影是什么.北京:文化艺术出版社,2008.
[3]王乐文.论电影声音与电影声音文化[J].影视技术,2004(8).
[4]林达悃.录音声学[M].北京:中国电影出版社,1995.
[5]管善群.立体声纵论[J].应用声学,1995(14).
[6]T.Holman.The Number of Audio Channels.J.A.E.S.(Abstract)[J].Preprine,1996,44(7/8):4292.
猜你喜欢
知识窗(2024年4期)2024-05-09 01:41:45
作文周刊·小学一年级版(2024年12期)2024-04-29 12:19:29
家庭影院技术(2021年6期)2021-07-28 07:35:44
北京航空航天大学学报(2020年10期)2020-11-14 09:25:58
家庭影院技术(2020年2期)2020-03-25 13:27:36
家庭影院技术(2019年4期)2019-04-17 05:13:00
家庭影院技术(2017年11期)2017-12-20 08:10:17
山东工业技术(2017年23期)2017-11-28 09:15:38
演艺科技(2017年8期)2017-09-25 16:08:33
语文知识(2014年2期)2014-02-28 21:59:21
