
基于GA-BP的安全带佩戴识别方法
2014-12-23 07:13葛如海胡满江张学荣苏清祖
江苏大学学报(自然科学版) 2014年2期
葛如海,胡满江,张学荣,苏清祖
(江苏大学汽车与交通工程学院,江苏镇江212013)
安全带作为乘员约束系统最有效的保护装置,自发明以来已经挽救了无数人的生命[1].为了提高安全带佩戴率,世界各国都强制安装了安全带佩戴提示系统(SRS).据A-NCAP公布的最新数据显示,澳大利亚80%以上的车型都配备了安全带佩戴提示系统[2].我国 C-NCAP 管理规则[3]中明确将安全带佩戴提示系统作为汽车安全的加分项.然而,据文献[4-5]显示,我国安全带佩戴率普遍偏低,其中存在多种躲避安全带佩戴提示系统的不规范佩戴行为是主要原因之一,例如:坐在已经系好安全带的座椅上或购买单独的安全带卡扣,致使提示系统失效.据调查,安全带卡扣仅淘宝商城的月销量达到1万件以上.近年来,交警部门还研发了道路视频监控驾驶员安全带的佩戴情况,然而该方法一方面受光线环境的影响较大,在检测准确率上有待提高,另一方面由于采用事后震慑的方式,因而在实时防范驾驶安全上存在不足.
针对上述问题,笔者在车载视频监控技术的基础上,采用BP神经网络算法建立安全带佩戴识别模型,并引入GA优化BP神经网络的权值与阈值,从而提出一种基于GA-BP的安全带佩戴识别方法.该方法旨在为安全带佩戴检测问题提供一种新的思路,为安全带佩戴预警系统的开发提供一定的理论依据.
1 图像采集设备和装置设计
图像采集试验的目的是获取车辆起步后,安全带不同佩戴状态的图像信息,试验过程遵循驾驶环境的真实性和数据采集对驾驶员操控车辆无干扰2项基本原则.
1.1 试验车辆及人员的选择
试验车辆为某品牌乘用车,如图1所示.为方便数据采集,提供了试验采集设备固定所需的车载支架以及设备正常工作所需的电源,如图2所示.

图1 试验车辆

图2 车载支架及电源
为保证采集到的数据具有代表性,试验人员按性别分为男性和女性,根据我国成年人身高特征的分布规律,男性身高为170~180 cm,女性身高为158~168 cm,并按身高范围段将其分成5组,每组10人.同时,为保证后期建立的识别模型具有较强的适应性,每名驾驶员穿着不同颜色的衣物.
1.2 试验安全带的选用
反光性能安全带的使用情况如图3所示.为提高识别系统的适应性,试验过程使用了具有反光性能的安全带(专利号:CN200985014Y),如图3a所示.该安全带作为安全带佩戴识别系统硬件部分的重要组成,在不改变织带性能要求的前提下,在编织过程中加入反光材料,在补光的条件下具有极强的反光特性.乘员佩戴普通材料编织的安全带,穿着与安全带颜色相近的衣物,采集到的安全带佩戴图像如图3b所示,采用反光材料编织的安全带,在补光条件下采集到的安全带佩戴图像如图3c所示.

图3 反光性能安全带的使用情况
对比图3b,c可以发现:具有反光性能的安全带在补光条件下具有极强的反光特性,在图像中的灰度级较高,即便乘员穿着与安全带颜色相近的衣物(图3c中穿着纯白色衣物),也很容易通过阈值分割将安全带从复杂的背景中提取出来.
1.3 补光装置的选用
车厢多变的光线环境对安全带佩戴识别带来极大的干扰,为保证CCD传感器在极差的光线环境下仍能采集到清晰的安全带佩戴图像,图像采集时需进行补光操作.然而,目前的CCD传感器都是带AGC(auto gain control,AGC)自动增益控制的,突然的光亮会造成光感元件的瞬间饱和,每次补光时间不能太短,否则无法获得清晰的图像,而长时间的光亮会给驾驶员操控车辆带来较大的干扰.
考虑可见光电磁波谱的波长范围一般为400~700 nm,选用工作电压12 V,红外线波长为850 nm,直控照度为5 lx的红外光源作为系统的补光装置,如图4a所示.由于该光源属于不可见光,可有效避免长时间光亮给驾驶员带来的干扰.夜晚普通光线下采集的安全带佩戴图像如图4b所示.配合红外补光装置采集的图像如图4c所示.

图4 红外补光装置的使用
2 基于BPNN安全带佩戴识别模型
BP神经网络(back propagation neural network,BPNN)为目前人工神经网络最常用的一种,是一种多层前馈神经网络,可以用作分类、聚类和预测等,该神经网络的特点是信号前向传递,误差反向传播[6-7].
2.1 基于图像预处理技术的样本选取
根据上述行车试验采集得到的安全带佩戴图像信息如图5所示,4幅图像涵盖了安全带佩戴方式的所有情形.根据安全带佩戴状态分类:①规范佩戴;②仅系肩带;③坐安全带;④ 未佩戴.安全带佩戴识别模型的样本形式为安全带4种佩戴模式的图像信息及对应的标识向量.

图5 安全带不同佩戴方式
1)图像预处理.为满足实时性要求,首先对试验采集到的原始图像进行灰度图转化,然后采用中值滤波对其进行去噪处理,采用双峰直方图阈值分割法对去噪后的灰度图像进行阈值分割,灰度图转化及去噪后效果如图6所示,二值化效果如图7所示.

图6 灰度图转化及去噪后效果图

图7 二值化效果图
2)Hough变换.乘员的体貌特征及身体晃动等将导致安全带佩戴图像尺度和方向产生变化,为防止对识别结果造成影响[8],采用极坐标转换对二值化后的图像进行处理,效果图如图8所示.
3)输入、输出向量的选取.以Hough变换后的二值化图像(图8)像素值作为样本输入向量.然后,对上述4种佩戴方式进行标识,定义规范佩戴安全带为[1,0,0,0].不规范佩戴行为:仅系肩带为[0,1,0,0];坐安全带为[0,0,1,0];未佩戴为 [0,0,0,1].定义的标识向量即为样本输出向量.

图8 极坐标转换效果图
综上所述,对由行车试验采集到的安全带佩戴原始图像进行了预处理,即依次进行了灰度图转化、平滑去噪、图像二值化和Hough变换,从而得到了较为理想的安全带佩戴识别模型的样本信息.样本选取流程图如图9所示.

图9 样本选取流程图
2.2 PCA降维处理
在安全带佩戴识别模型的神经网络训练过程中,如果输入向量直接采用极坐标转化后的二值化图像的像素值,会导致不足:① 识别模型的效率低;②因各维数据之间的相互影响而导致模型识别准确率降低.为此采用PCA方法[9]对样本数据进行降维处理,目的在于消除上述影响,提高模型精度.PCA降维的具体流程如图10所示,P为特征向量矩阵,Ttrain为得分矩阵.

图10 PCA降维流程图
在对样本数据降维处理过程中,降维维数分别为5,10,15,20 时,贡献率分别为 77.70%,84.79%,88.05%,91.07%.当降维维数为10时,主元贡献率最接近85.00%,获取了安全带佩戴图像的主要信息.当维数继续增加时,主元贡献率的增加不是很大,而维数的增加导致识别模型的计算量大大增加.故可以取85%的主要信息,即PCA降维降至10维.
2.3 安全带佩戴识别模型的建立
通过上述主元分析法的特征变换,数据的维数得到了有效的降低,然后采用BP神经网络对所选取的样本进行识别.
通过Matlab神经网络工具箱,构建BP神经网络.在BP神经网络模型中,神经网络为3层结构.为防止网络过学习和欠学习状态的发生,通过经验与试验相结合的方式,确定神经网络的隐层节点数为20个,训练次数设为10次,神经网络的最大训练测试设定为100次,最小均方误差设定为1×10-8s,最小梯度设定为1×10-20s.考虑BP神经网络在做分类问题时,sigmoidal函数具有较好的执行效果,选用2个传递函数分别为logsig函数和purelin函数.安全带的4种佩戴模式对应的神经网络的输出分别为安全带 4 种标识向量:[1,0,0,0];[0,1,0,0];[0,0,1,0];[0,0,0,1].通过训练数据和对应的输出不断训练BP神经网络,从而得到了基于BP神经网络的安全带佩戴识别模型.将测试数据代入到已构建的识别模型中,并竞争输出,得到测试数据各个数据向量所对应图像所属类别.
3 基于GA-BP安全带佩戴识别模型
3.1 GA优化BP神经网络参数
虽然BP神经网络具有简单、可塑和寻优精确等特点,但是其收敛速度较慢,且容易受到局部极小点的困扰.而遗传算法具有很强的全局搜索能力和很好的全局优化性能[10-12].因此通过遗传算法的优化,能有效改善BP神经网络的收敛速度与精度,提高安全带佩戴识别模型的准确率.为此,采用遗传算法对BP神经网络的初始权值和阈值进行优化,具体步骤如下:
1)确定BP神经网络的拓扑结构,即确定网络的层数、隐含节点数.
2)根据每个变量的取值范围进行解码,解码后的染色体即为神经网络的权值和阈值.
3)选择、交叉、变异操作,即将选择算子、交叉算子、变异算子依次作用于群体.群体经过选择、交叉、变异运算后得到下一代群体.
4)计算适应度值.若适应度值大于设定值,停止遗传操作;若适应度值未达到设定值,则转到步骤3),遗传算法得到的最大适应度的个体作为BP神经网络的初始权值和阈值.
5)将上述得到的初始权值和阈值代入到BP神经网络过程中,并运行BP神经网络算法对需要处理的过程进行处理,计算模型误差,当误差满足设定值时,则终止迭代.
综上所述,遗传算法优化BP神经网络的流程图如图11所示.

图11 GA优化BP神经网络流程图
3.2 遗传算法的实现
遗传算子的设计主要通过英国谢菲尔德大学开发的遗传算法工具箱来实现.选择算子的设计采用工具箱中的select()函数,交叉算子设计采用recombin()函数,变异算子设计采用mut()函数.
遗传算法中的初始种群的目标函数值为初始权值与阈值下BP神经网络对部分样本的识别准确率(样本数为100,既作为训练样本,又作为测试样本).初始种群个体的编码形式为二进制编码.
另外,遗传算法中主要有以下运行参数需要预先确定,分别为种群大小,染色体长度,终止代数,交叉概率,变异概率.通过大量的试验,确定上述参数的最终取值:种群大小为20;染色体长度为304;终止代数为20;交叉概率为0.6;变异概率为0.1.
综上所述,在基于BP神经网络模型的基础上,增加了遗传算法优化其权值和阈值的过程,建立了基于GA-BP的安全带佩戴识别模型.建模的具体流程图如图12所示.

图12 基于GA-BP的安全带佩戴识别模型
4 实例验证
实例中的安全带佩戴识别模型样本数据由上述行车试验采集获得.试验过程中采用的焦距为4 mm的CCD传感器,使用了具有反光性能的安全带以及红外补光装置(照度5 lx、红外线波长为850 nm).试验采集人员分为男性和女性驾驶员,各50名,共计100名.其中男性驾驶员的身高分布为170,173,175,178,180 cm,女性驾驶员的身高分布为 158,160,163,165,168 cm.根据光线环境的不同,样本图像分为白天样本与夜晚样本,部分样本如图13a,b所示.以夜晚样本为例分别对基于BP神经网络的识别模型和基于GA-BP的识别模型进行仿真与验证.其中样本数为800组,训练样本为400组,测试样本为400组(4种模式各100组).将测试集对已训练好的BP识别模型和基于GA-BP识别模型进行仿真测试,运行结果如图14,15所示,识别结果如图16,17所示,如正确识别,则显示为“1”.由图14,15可以看出:BP识别模型和GA-BP识别模型迭代100次所用时间均为6 s,GA-BP识别模型实时性并未明显降低(Matlab界面是以s为单位进行运行时间统计,它的运行时间没有增加到1 s以上,所以界面上没有显示出来.)
根据图16,17分别得到安全带各种佩戴状态下的识别结果如表1,2所示,BP模型夜晚样本的识别率为81.25%,而GA-BP模型夜晚样本的识别率为89.75%,总识别率提高了8.50%.这表明经遗传算法优化后模型的准确性得到了显著的提高.

图13 不同光线环境下的部分样本

图14 BP神经网络模型界面运行结果

图15 GA-BP模型中BP神经网络界面运行结果

图16 BP模型识别结果

图17 GA-BP模型识别结果

表1 夜晚样本下BP模型识别结果
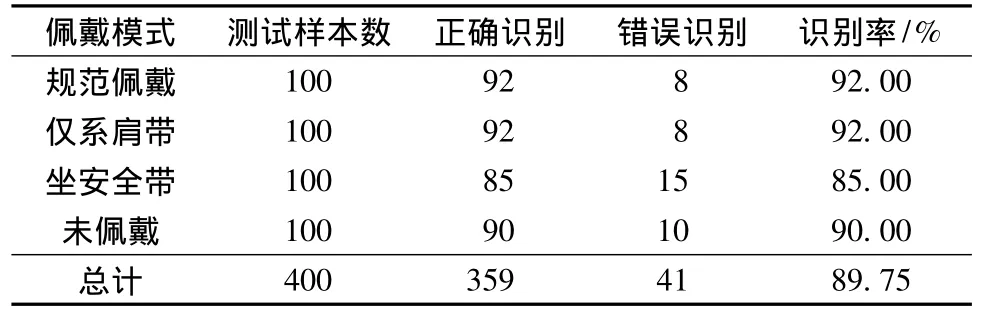
表2 夜晚样本下GA-BP模型识别结果
综上所述,相比BP识别模型,所建立的基于GA-BP安全带识别模型,在未明显降低实时性的前提下,能够更准确地识别出安全带佩戴状态,具有更高的准确性.因此,选用GA-BP识别模型作为安全带识别的最终方案.
5 结论
1)针对安全带不规范佩戴问题,通过设计具体的行车试验采集驾驶员安全带佩戴图像信息,应用图像处理技术将极坐标转换后的二值化图像像素值作为识别模型样本数据的输入向量,并将对应的安全带佩戴状态进行向量标识,作为样本数据的输出向量.
2)应用BP神经网络建立起具体的安全带佩戴识别模型,并引入GA算法对其权值与阈值进行优化,建立起基于GA-BP的安全带佩戴识别模型.
3)通过实例验证,结果显示模型对安全带不同佩戴模式的识别率达到了89.75%,这表明该方法合理有效,能够较好地应用于实际问题之中.
References)
[1]Pickrell T M,Ye T J.Results from the national occupant protection use survey controlled intersection study[EB/OL].(2011-07-13)[2012-07-07].http:∥www.nhtsa.gov.
[2]Mclntosh L,Yates A.Seat belt reminders saving lives[EB/OL].(2010-04-01)[2012-07-07].http:∥www.ancap.com.au/mediarelease?id=29.
[3]C-NCAP管理规则[S].天津:中国汽车技术研究中心,2012.
[4]俞学群,武阳丰.机动车安全带作用、使用现状及干预策略[J].中国预防医学杂志,2008,9(5):439-442.Yu Xuequn,Wu Yangfeng.The role of the motor vehicle seat belt,use the current situation and intervention strategy[J].China Preventive Medicine,2008,9(5):439-442.(in Chinese)
[5]Zhang W,Huang Y H,Roetting M,et al.Drivers'views and behaviors about safety in China:what do they not know about driving[J].Accident Analysis and Prevention,2006,38:22-27.
[6]Kayacan E,Oniz Y,Aras A C,et al.A servo system control with time-varying and nonlinear load conditions using type-2 TSK fuzzy neural system[J].Applied Soft Computing,2011,11(8):5735-5744.
[7]董文德,徐之梅,李 奇.稳像中基于BP神经网络的颤振预测及改进[J].浙江大学学报:工学版,2010,44(12):2263-2268.Dong Wende,Xu Zhimei,Li Qi.Vibration forecasting using BP neural network for image stabilization and an improving method[J].Journal of Zhejiang University:Engineering Science,2010,44(12):2263-2268.(in Chinese)
[8]贾立山,罗 剑,李世其.基于车道线直线模型的道路曲率估计方法[J].江苏大学学报:自然科学版,2012,33(4):373-378.Jia Lishan,Luo Jian,Li Shiqi.Road curvature estimation based on linear lane model[J].Journal of Jiangsu University:Natural Science Edition,2012,33(4):373-378.(in Chinese)
[9]杨万扣,吉善兵,任明武,等.基于增加的二维主成分分析的特征提取方法及其在人脸识别中的应用[J].中国图像图形学报,2009,14(2):227-232.Yang Wankou,Ji Shanbing,Ren Mingwu,et al.Face extraction based on enhanced 2D PCA and its application to face recognition[J].Journal of Image and Graphics,2009,14(2):227-232.(in Chinese)
[10]Li Y G,Pilidis P.GA-based design-point performance adaptation and its comparison with ICM-based approach[J].Applied Energy,2010,87(1):340-348.
[11]Dipti D K.A self-organizing migrating genetic algorithm for constrained optimization[J].Applied Mathematics and Computation,2008,198:237-250.
[12]Rezende M C A F,Costa C B B,Costa A C.Optimization of a large scale industrial reactor by genetic algorithms[J].Chemical Engineering Science,2008,63:330-341.
猜你喜欢
电子制作(2019年19期)2019-11-23
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
今日农业(2019年16期)2019-01-03
石油地球物理勘探(2017年2期)2017-11-23
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
中国交通信息化(2017年8期)2017-06-06
疯狂英语·新读写(2017年1期)2017-04-06
统计与决策(2017年2期)2017-03-20
小学生作文(低年级适用)(2017年12期)2017-02-06
现代农业(2016年6期)2016-02-28
