
混合动力电动汽车动力切换协调控制综述
2014-12-23 07:13何仁,束驰
江苏大学学报(自然科学版) 2014年4期
何 仁,束 驰
(江苏大学汽车与交通工程学院,江苏镇江212013)
与传统汽车不同,混合动力电动汽车具有2种或2种以上动力源及驱动系统[1],为了优化多个动力源在稳态或动态过程中的能量分配,提高驱动效率,国内外专家学者研究了混合动力系统能量管理策略.为了适应车辆各种工况的功率需求,混合动力电动汽车动力工作模式存在多种形式与组合,这就造成了其工作模式的多样性,也就产生了在各个不同模式之间的切换问题[2].工作模式切换关系如图1所示,驱动模式之间存在切换问题,制动模式之间存在切换问题,驱动模式与制动模式之间也存在切换问题.

图1 工作模式切换关系图
目前混合动力电动汽车的动力切换过程主要是基于参数判断完成的,是一种跳跃式切换,即只要控制参数满足设定的模式切换条件就进行动力模式转换.车辆在动态工况下,发动机受内部热惯性、混合气形成条件、燃烧过程、供气量及运动件惯性等因素影响,其动态特性将偏离稳态特性,发动机转矩变化的时间常数有几百毫秒,而电动机转矩变化的时间常数只有几毫秒,当动力模式发生改变时,二者差异明显的动态特性可能造成发动机转矩或电动机转矩大幅度变化以及变速器、离合器的状态改变,对车辆动力传动系统产生不可忽视的冲击.因此在混合动力系统运行模式切换过程完成之前,整车控制器还需协调各动力源转矩的动态输出,降低切换过程中由于动力源响应特性不同造成的转矩波动,实现动力传递的平顺性[3],这便是动力切换协调控制问题的本质.针对混合动力电动汽车动力切换问题,笔者分析国内外有关研究现状及混合动力切换协调控制的关键技术,并指出今后需要研究的关键问题.
1 混合动力切换协调控制研究现状
20世纪90年代以来,国外主要汽车公司开始研发混合动力电动汽车,美国以中大排量的混合动力车型为主,日本以丰田和本田为代表的ISG+行星轮系和ISG+CVT汽油混合动力为主.欧洲主要以柴油混合动力车型和低排量汽油混合动力车型为主.国内混合动力电动汽车的研究起步较晚,主要集中在低、中度混合动力电动汽车的研发上.
国内外有关混合动力电动汽车技术的研究,主要集中在混合动力机电耦合机构、能源管理策略、混合动力变速器换档规律、动力切换与控制等方面.
丰田Prius汽车采用的混合动力系统较好地解决了动力切换协调控制问题,传动系示意图如图2所示,该系统主要由发动机、电动机、发电机和行星齿轮机构组成.行星齿轮机构的太阳轮、齿圈和行星齿轮架分别与发电机、电动机和发动机连接,同时齿圈与减速齿轮相啮合.行星齿轮机构为2自由度系统,太阳轮、齿圈和行星架三者的转矩已知其中2个,第3个的转矩也随之确定.发电机的转矩始终与发动机转矩成比例,控制系统通过可测的发电机转矩利用行星齿轮机构直接计算出发动机转矩,进而可得发动机作用在电动机轴上的转矩,再将需求转矩减去发动机作用在电动机轴上的转矩可以得到电动机的目标转矩,使模式切换平滑,控制算法实质上是电动机转矩对发动机转矩的补偿控制.
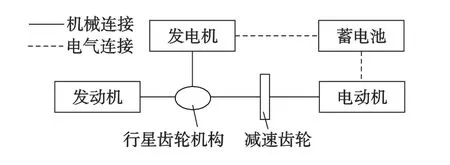
图2 丰田Prius汽车传动系示意图
丰田混合动力系统以行星轮作为动力耦合器,利用电动机转矩对发动机转矩进行补偿控制,消除转矩波动,解决动态协调控制问题.不具备类似动力分配机构的混合动力系统无法使用该方法获得发动机转矩数据,系统中采用的发动机转矩反馈和电动机转矩补偿控制具有很高的参考价值.
国内外专家学者对混合动力切换的协调控制问题进行了研究,取得了一些成果.
R.I.Davis等[4]针对 ISG 型混合动力电动汽车建立了发动机转矩观测器,通过对发动机转矩波动实时计算,利用电动机输出相应转矩抵消发动机的转矩脉动.
R.Beck等[5]对一种双电动机单离合器并联式混合动力电动汽车由纯电动切换至联合驱动过程的平稳过渡问题进行了研究,建立了相应的系统动力学模型,提出了模型预测控制方法,减少了离合器接合过程的冲击度,并验证了控制策略的鲁棒性.
K.Koprubasi[6]将混合动力电动汽车的模式切换视为混杂系统的切换控制问题,划分了混合动力电动汽车工作模式的不同子域并设计了相应的控制器,进行了从纯电动切换至混合驱动的仿真分析,通过试验证明了基于混杂系统的切换控制能有效减小模式切换过程产生的冲击.
S.Kim等[7]为提高模式切换的性能,针对一种并联式混合动力系统研究了2种离合器滑动控制的方法:①采用开环离合器压力控制,以调节目标离合器传递转矩;② 控制离合器的压力,得到离合器两侧合适的转速差,规定了动力总成各部件控制的顺序,对与车辆动态模型有关的各种驾驶情况进行了仿真,建立了相应的瞬态控制策略.
A.Smith等[8-9]对并联式混合动力电动汽车纯电动行进中启动发动机进行了研究,提出了离合器恒定压力与电动机转矩控制相结合的闭环控制策略,通过台架试验验证了该控制策略的有效性.
H.S.Hwang等[10]在离合器结合过程中应用发动机和电动机的动态转矩控制策略,并在基于AMESim软件的混合动力模型基础上进行仿真研究,结果表明算法有效提高了整车的驾驶舒适性.
Zhang Jun等[11]以CVT混合动力电动汽车为研究对象,利用发动机的伪目标转速和伪输出转矩计算电动机转速,实现纯电动工况与纯发动机工况的平顺过渡,在Matlab/Simulink环境下进行了仿真试验,没有考虑发动机输出、离合器结合的时滞问题,以及电动机转矩与发动机输出的相互补偿问题.
W.Choi等[12]对一种基于离合器/制动器参与切换具有较高效率的双模式动力分配方案进行研究,指出动力切换过程中发动机的开关,离合器/制动器对驾驶性能造成的影响,开发了基于电动发电机转矩控制和发动机转速控制减少转矩变化率的控制算法,并利用AMESim进行了建模与仿真试验.
M.Song等[13-14]对一种并联式混合动力电动汽车进行传动系建模仿真,建立测试平台评估模式切换特性,根据测试平台确定了离合器结合点,由试验结果建立了发动机离合器控制算法.该控制算法根据车辆运行工况采用4个步骤控制发动机离合器,最大限度地减少了转矩变化.制定了在不含ISG情况下的电动机控制算法,针对模式切换问题通过对比仿真试验验证了该控制算法的有效性.
童毅等[15-16]针对离合器结合变速器在挡的情况,提出了由转矩管理策略和动态协调控制算法组成的面向动态协调问题的控制算法的体系结构,采用“发动机转矩开环+发动机转矩动态估计+电动机转矩补偿”控制算法对典型的模式切换问题完成了理论分析、算法开发,仿真研究和台架试验,试验结果表明该方法有效地减小了输出转矩的波动.其动态协调控制算法基本算法示意图如图3所示.
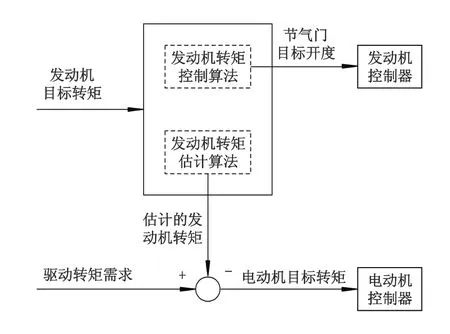
图3 动态协调控制算法基本算法示意图
杜常清[17]提出了混合动力控制策略开发平台的建立方案;提出了基于神经网络的发动机转矩估计模型,对动力系统模式切换过程的控制进行研究;提出了一种具有较强鲁棒性的模式切换瞬态过程控制策略;提出了基于模型预测的电动机调速闭环控制策略,有效减小了模式切换过程中输出转矩、转速的波动.
杜波[18]分析了单电动机重度混合动力系统结构特性,提出了发动机启动过程中电动机转矩与离合器结合压力联合控制和发动机启动后电动机转矩调节的分阶段动态协调控制策略,针对离合器结合后发动机和电动机转矩变化的模式切换过程,采用“发动机节气门开度变化率限制+发动机转矩估计+电动机转矩补偿”的协调控制策略,针对混合驱动过程中有离合器接合的模式切换过程,提出了基于电动机主动调速和离合器接合压力控制的协调控制策略.
国内一些硕士研究生借鉴童毅提出的电动机转矩补偿思想进行了相应研究:李孟海[19]基于模型匹配方法设计了动态协调控制方法,进行了软件仿真对比试验,验证了采用模型匹配控制方法设计的动态协调控制算法比采用比例控制方法和PID控制方法设计的动态协调控制算法系统的控制精度更高,动态响应速度更快,还进行了硬件在环仿真试验;黄剑峰[20]设计了限力矩离合器油压控制的模糊控制策略,进行了电动机起动发动机台架试验;刘东阳[21]采用遗传算法优化BP神经网络的方法,由发动机的试验数据建立了发动机转矩估计模型.
颜伏伍等[22]对混合动力电动汽车的发动机调速方法进行了阐述,针对纯电动切换至发动机驱动这一切换过程,利用AVL动态试验台架和dSPACE AutoBox工具完成了离合器接合分离、发动机起动调速控制,验证了“发动机调速+发动机目标转矩确定+发动机动态转矩估计+电动机转矩协调控制”控制方法的有效性,改善了整车平顺性.
戴一凡等[23]针对一种新型的单电动机双离合器式强混合动力结构,建立了其车辆分层控制系统,制定了整车能量管理策略,研究了行进中启动发动机过程的动态协调控制,并通过仿真分析了整车燃油经济性,台架试验验证了动态协调控制.
严运兵等[24-25]提出了“转矩预分配+发动机调速+发动机动态转矩估计+电动机转矩补偿控制”的动态控制策略.搭建了基于整车动态控制的仿真模型,对控制算法进行了定工况和全工况仿真验证,并借助dSPACE快速控制原型工具,搭建试验台架,进行了切换控制试验,有效地降低了混合动力系统的转矩波动,保证了动力传递的平稳性.
赵治国等[26]以四轮驱动混合动力轿车为研究对象,针对模式切换问题,重点考察了纯电动向四轮混合驱动模式的切换过程,考虑了动力耦合过程中发动机与轮毂电动机间动态特性的差异,设计了无扰动模式切换控制策略并进行了仿真试验,保证了模式切换过程中的动力传递平稳性.
戴一凡等[27]采用发动机起动过程转矩协调控制策略和发动机退出过程的转矩补偿控制策略,解决了纯电动模式与发动机驱动模式间切换时产生的动力系统冲击,并通过台架和实车试验验证了控制策略的有效性.
杨阳等[28-31]提出了一种单电动机重度混联方案,并对其进行了多方面的研究:文献[28]以平顺性为目标,分析动力切换过程的参数变化规律,确定了系统在动力切换中的控制策略和扭矩协调控制算法,并对算法进行了仿真验证;文献[29]侧重对纯电动模式切换至发动机驱动模式的动态过程进行了动力学分析,提出了动力源和离合器的转矩协调控制策略,运用仿真和台架试验对提出的控制策略进行了验证;文献[30]以系统效率最优为目标,划分了混合动力系统工作模式区域,制定了相应的能量分配策略,研究了驱动工况下不同类型工作模式之间切换的扭矩协调控制算法,仿真试验表明控制算法可有效提高切换过程中动力传递的平稳性;文献[31]采用遗传算法结合BP神经网络建立发动机转矩模型,在准确估计离合器接合与分离前后发动机输出转矩的基础上,通过离合器接合压力模糊控制和电动机转矩补偿控制,减小了模式切换过程中的转矩波动,提高了切换品质.
叶明等[32]在研究插电式混合动力客车结构特征的基础上,研究了客车主要工作模式切换的逻辑关系,提出了插电式混合动力客车采用选择性模式切换方式,制定了控制逻辑,提出了发动机、电动机及自动离合器的控制方法,并通过实车道路试验进行验证.
王磊等[33]以混联式混合动力客车为研究对象,针对离合器在结合过程中的运行状态,设计了采用模糊自适应滑模方法提高控制系统的控制精度和鲁棒性的协调控制策略,并通过仿真及实车试验验证了控制策略的有效性.
倪成群等[34]对一种单轴并联式混合动力客车动力切换进行了分析,重点研究了从纯电动模式到纯发动机模式和混合驱动模式的切换过程,在离合器结合之前和结合过程中,采用发动机转速自适应模糊比例积分微分闭环控制跟随电动机转速,在离合器结合后,利用电动机补偿发动机动态转矩,并进行了台架试验验证了控制策略的有效性.
孔辉等[35]针对一种静液传动双马达车辆的模式切换,通过检测车速和踏板信号区分车辆工作模式,采用在线计算工作元件输出转矩、动态调整待切入元件输出转矩的方法平顺整车的输入转矩,避免驱动转矩中断和转矩过大的现象.
杨阳等[36]针对一种单电动机双离合器混合动力车辆,在满足电起机条件时发出限力矩离合器结合指令,通过控制限力矩离合器液压缸油压和制定的扭矩协调控制策略实现电起机过程,专利的相关内容涵盖在文献[20]中.
朱军等[37]对转矩控制方法进行了研究,判断运行模式在确定当前需求转矩不受转矩限制且可用转矩满足电动机转矩需求的情况下,将电动机需求转矩确定为电动机最终目标转矩,电动机控制器收到信号后采用当前混合动力模式的第1,2转矩变化率逐步提升电动机转矩至目标转矩,这种控制方法避免了模式切换时发生的转矩阶跃式升高或降低.
通过以上分析可以发现目前相关研究具有以下特点:
1)从协调控制策略看,多数研究利用电动机转矩补偿控制的方法实现动力切换的协调控制.
2)从发动机转矩参数实时获取方式看,目前主要有以下方法:①发动机直接提供实时转矩数据;②根据发动机状态参数的MAP图标定法;③神经网络模型、平均值模型等模型估计法;④曲轴瞬时转速、缸内离子电流等信号检测分析法.方法①对发动机有要求,通用性差;方法②简单易行,但精度和适应性较差;方法③中平均值模型在稳态和动态试验大负荷情况下估计结果会出现较大偏差[15],神经网络模型估计精度较好但适应性不佳,如果通过在线的实时训练来更新网络权值,所需要的硬件资源将会很高[17];方法④比较复杂,对硬件要求较高.
3)从车辆动力学建模工具看,很多研究采用了Matlab/Simulink软件,其中很多对传动系进行了简化,例如,文献[19]对蓄电池、发动机、电动机做了相应简化.也有采用了AVL/Cruise、AMESim软件建模仿真的,采用这类软件可以大大简化建模工作.
4)从试验方法来看,绝大多数研究采用了离线仿真的方法,少数采用了硬件在环仿真和台架试验,极少数进行了整车试验.
2 混合动力切换协调控制关键技术
为了解决协调控制问题,需要研究并联混合动力电动汽车在发动机和电动机状态切换时的系统协调机理,确定相应的控制策略,控制发动机和电动机输出转矩的波动,并推导系统稳定性判断依据.目前需要解决的关键技术如下:
1)并联混合动力电动汽车动力切换的瞬态特性与整车动力学建模.研究发动机、电池、电动机、离合器等总成在不同使用工况下的特性,分别建立其反映动态特性的动力学模型.建立转矩模型观测器对发动机转矩进行实时反馈,获得发动机的动态变化特性模型;研究电池特性和电动机的动力特性;分析离合器接合特性;研究并联混合动力电动汽车各动力源动力输出的相互关系,建立整车动力学模型,研究发动机与电动机联合作用的耦合规律.
2)基于模型预测的电动机转矩补偿控制.分析驾驶意图、动力切换稳定时间和行驶工况信息等因素对动力切换的瞬态稳定性的影响,利用动力输出的稳定性控制参数补偿汽车行驶中不确定因素引起的频繁切换,保证汽车动力切换的稳定.
3)并联混合动力系统动力切换动态协调控制的试验研究.仿真研究得出的结论距整车实验有一定差距,通过搭建硬件在环仿真实验台模拟实际系统,进行并联混合动力系统动力切换控制的硬件在环仿真研究,能够协调各子系统的控制策略和性能指标,从而可以验证和修正典型状态切换的动态协调控制算法,而台架试验和整车道路试验是该项研究真正实用化的关键技术.
4)并联混合动力电动汽车动力切换时的瞬态稳定性.为了决策出最佳的动力模式切换,既要考虑当前行驶工况所对应的动力模式(属于离散变量),也要考虑当前模式下动态系统对应的连续变量状态值(如汽车车速,安全车距等).一旦准备切换到新的工作模式,又必须考虑工作模式切换所造成的连续变量动态系统的稳定性问题.建立汽车不同动力模式切换的统一混杂动态系统模型.明确各状态的边界和约束条件,建立动力切换系统稳定性判据的李雅普诺夫函数.
建立合理准确的部件模型和整车动力学模型可正确反映部件的稳态动态特性,提高仿真结果的准确性,为试验研究积累基础.试验研究初期利用软件离线仿真可以初步测试控制策略的效果,利用硬件在环仿真可以方便地对控制器的功能进行检验,台架试验可以实现从零部件到整车的各种试验,试验过程易于操控,在经济条件允许的情况下整车试验能够给动力系统施加真实的道路负载,准确反映动力系统的实际性能.动力切换的协调控制能够防止混合动力系统动力切换时可能发生的发动机、电动机输出转矩突变问题,提高动力传递的平顺性.分析动力切换控制过程的稳定性,确保协调控制方法具有很好的自适应性和容错能力,才能为协调控制策略的真正应用奠定基础.
3 结论
分析了混合动力切换协调控制问题的产生原因,介绍了目前丰田Prius混合动力系统解决混合动力切换协调控制问题所采取的控制方法.从发动机转矩参数实时获取、建模工具、控制策略、试验方法等方面分析了国内外相关研究现状.从整车动力学模型建立、补偿控制策略、试验研究、切换系统稳定性4个方面讨论了动力切换协调控制的关键技术问题,提出了今后需要研究的关键技术:①并联混合动力电动汽车动力切换的瞬态特性与整车动力学建模;②基于模型预测的电动机转矩补偿控制;③并联混合动力系统动力切换动态协调控制的试验研究;④并联混合动力电动汽车动力切换时的瞬态稳定性分析.
References)
[1]隗寒冰,秦大同,陈淑江,等.加快三元催化器起燃的HEV混合驱动控制策略[J].江苏大学学报:自然科学版,2012,33(6):626-631.Wei Hanbing,Qin Datong,Chen Shujiang,et al.Control strategy of increasing three-way catalytic converter light-off for hybrid electric vehicle in combination driving cycle[J].Journal of Jiangsu University:Natural Science Edition,2012,33(6):626-631.(in Chinese)
[2]Kazunari M,Yoshiaki I,Yukio I.Design of the surge control method for the electric vehicle powertrain[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:2002-01-1935.
[3]牛艳霞.混合动力电动汽车运行状态切换过程动态控制研究[D].秦皇岛:燕山大学电气工程学院,2012.
[4]Davis R I,Lovenz R D.Engine torque ripple cancellation with an integrated starter alternator in a hybrid electric vehicle:implementation and control[J].IEEE Transactions on Industry Applications,2003,39(6):1765-1774.
[5]Beck R,Richert F,Bollig A,et al.Model predictive control of a parallel hybrid vehicle drivetrain[C]∥Proceedings of the44th IEEE Conference on Decision and Control,and the European Control Conference.Piscataway,USA:IEEE,2005:2670-2675.
[6]Koprubasi K.Modeling and control of a hybrid-electric vehicle for drivability and fuel economy improvements[D].Korea:Ohio State University,2008.
[7]Kim S,Park J,Hong J,et al.Transient control strategy of hybrid electric vehicle during mode change[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:2009-01-0228.
[8]Smith A,Bucknor N,Yang H,et al.Controls development for clutch-assisted engine starts in a parallel hybrid electric vehicle[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:2011-01-0870.
[9]He Yongsheng,Bucknor N K,Smith A L,et al.Modeling and drivability assessment of a single-motor strong hybrid at engine start[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:2010-01-1440.
[10]Hwang H S,Yang D H,Choi H K,et al.Torque control of engine clutch to improve the driving quality of hybrid electric vehicles[J].International Journal of Automotive Technology,2011,12(5):763-768.
[11]Zhang Jun,Zhou Yunshan.A study on mode switching smoothly on hybrid electric vehicle based on CVT[C]∥International Conference on Remote Sensing,Environment and Transportation Engineering.Piscataway,USA:IEEE,2011:972-975.
[12]Choi W,Kang J,Hong S,et al.Development of a control algorithm to reduce torque variation for the dual mode HEV during mode change[C]∥Vehicle Power and Propulsion Conference.Piscataway,USA:IEEE,2011:1-6.
[13]Song M,Oh J,Kim H.Engine clutch control algorithm during mode change for parallel hybrid electric vehicle[C]∥Vehicle Power and Propulsion Conference.Piscataway,USA:IEEE,2012:1118-1121.
[14]Song M,Oh J,Choi S,et al.Motor control of a parallel hybrid electric vehicle during mode change without an integrated starter generator[J].Journal of Electrical Engineering and Technology,2013,8(4):930-937.
[15]童 毅,欧阳明高,张俊智.并联式混合动力汽车控制算法的实时仿真研究[J].机械工程学报,2003,39(10):157-161.Tong Yi,Ouyang Minggao,Zhang Junzhi.Real-time simulation and research on control algorithm of parallel hybrid electric vehicle[J].Chinese Journal of Mechanical Engineering,2003,39(10):157-161.(in Chinese)
[16]童 毅.并联式混合动力系统动态协调控制问题的研究[D].北京:清华大学汽车工程系,2004.
[17]杜常清.车用并联混合动力系统瞬态过程控制技术研究[D].武汉:武汉理工大学汽车工程学院,2009.
[18]杜 波.单电机重度混合动力汽车模式切换与AMT换挡平顺性控制策略研究[D].重庆:重庆大学机械工程学院,2012.
[19]李孟海.混合动力车辆驱动转矩的协调控制方法及其硬件在环仿真[D].北京:清华大学汽车工程系,2006.
[20]黄剑峰.重度混合动力轿车模式切换扭矩协调控制策略[D].重庆:重庆大学机械工程学院,2012.
[21]刘东阳.重度混合动力汽车驱动模式切换中的动力源转矩协调控制[D].重庆:重庆大学机械工程学院,2012.
[22]颜伏伍,潘庆庆,杜常清.并联混合动力汽车从纯电动切换至发动机驱动的控制研究[J].汽车技术,2009(1):30-34.Yan Fuwu,Pan Qingqing,Du Changqing.Research on control of state-switch from pure motor drive to engine drive in PHEV[J].Automobile Technology,2009(1):30-34.(in Chinese)
[23]戴一凡,罗禹贡,边明远,等.一种新型强混合动力结构的控制策略[J].汽车工程,2009,31(10):919-923.Dai Yifan,Luo Yugong,Bian Mingyuan,et al.The control strategy for a new full hybrid powertrain structure[J].Automotive Engineering,2009,31(10):919-923.(in Chinese)
[24]严运兵,颜伏伍,杜常清.并联混合动力电动汽车动态协调控制策略及仿真研究[J].中国机械工程,2010,21(2):234-239.Yan Yunbing,Yan Fuwu,Du Changqing.Research on strategy and simulation for dynamic coordinative control of PHEV[J].China Mechanical Engineering,2010,21(2):234-239.(in Chinese)
[25]严运兵,颜伏伍,杜常清.并联混合动力电动汽车动态协调控制试验研究[J].公路交通科技,2010,27(1):126-131.Yan Yunbing,Yan Fuwu,Du Changqing.Experimental research on dynamic coordinated control for PHEV[J].Journal of Highway and Transportation Research and Development,2010,27(1):126-131.(in Chinese)
[26]赵治国,何 宁,朱 阳,等.四轮驱动混合动力轿车驱动模式切换控制[J].机械工程学报,2011,47(4):100-108.Zhao Zhiguo,He Ning,Zhu Yang,et al.Mode transition control for four wheel drive hybrid electric car[J].Journal of Mechanical Engineering,2011,47(4):100-108.(in Chinese)
[27]戴一凡,罗禹贡,李克强,等.单电机强混合动力电动车辆的动态协调控制[J].汽车工程,2011,33(12):1007-1012.Dai Yifan,Luo Yugong,Li Keqiang,et al.Dynamic coordinated control for a full hybrid electric vehicle with single motor[J].Automotive Engineering,2011,33(12):1007-1012.(in Chinese)
[28]杨 阳,杨文辉,秦大同,等.强混合动力汽车驱动模式切换扭矩协调控制策略[J].重庆大学学报,2011,34(2):74-81.Yang Yang,Yang Wenhui,Qin Datong,et al.Coordinated torque control strategy for driving-mode-switch of strong hybrid electric vehicle[J].Journal of Chongqing University,2011,34(2):74-81.(in Chinese)
[29]杜 波,秦大同,段志辉,等.新型混合动力汽车动力切换动态过程分析[J].汽车工程,2011,33(12):1018-1023.Du Bo,Qin Datong,Duan Zhihui,et al.An analysis on the power switching dynamic process in a new type of HEV[J].Automotive Engineering,2011,33(12):1018-1023.(in Chinese)
[30]杜 波,秦大同,段志辉,等.新型并联式混合动力汽车模式切换协调控制[J].中国机械工程,2012,23(6):739-744.Du Bo,Qin Datong,Duan Zhihui,et al.Coordinated control for mode-switch of a new parallel HEV[J].China Mechanical Engineering,2012,23(6):739-744.(in Chinese)
[31]秦大同,刘东阳,杜 波,等.重度混合动力汽车驱动模式切换动力源转矩协调控制[J].公路交通科技,2012,29(7):151-158.Qin Datong,Liu Dongyang,Du Bo,et al.Coordinated torque control of power sources for driving mode switch of full hybrid electric vehicle[J].Journal of Highway and Transportation Research and Development,2012,29(7):151-158.(in Chinese)
[32]叶 明,舒 红,陈 然.插电式混合动力客车工作模式切换控制研究[J].中国公路学报,2012,25(1):141-145.Ye Ming,Shu Hong,Chen Ran.Research on control logical of work mode shifting for plug-in hybrid bus[J].China Journal of Highway and Transport,2012,25(1):141-145.(in Chinese)
[33]王 磊,张 勇,舒 杰,等.基于模糊自适应滑模方法的混联式混合动力客车模式切换协调控制[J].机械工程学报,2012,48(14):119-127.Wang Lei,Zhang Yong,Shu Jie,et al.Mode transition control for series-parallel hybrid electric bus using fuzzy adaptive sliding mode approach[J].Journal of Mechanical Engineering,2012,48(14):119-127.(in Chinese)
[34]倪成群,张幽彤,赵 强,等.混合动力离合器结合过程的动态转矩控制策略[J].机械工程学报,2013,49(4):114-121.Ni Chengqun,Zhang Youtong,Zhao Qiang,et al.Dynamic torque control strategy of engine clutch in hybrid electric vehicle[J].Journal of Mechanical Engineering,2013,49(4):114-121.(in Chinese)
[35]孙 辉,杨力夫,肖 刚,等.静液传动双马达车辆的工作模式切换及转矩平顺控制:中国,CN201110187218.9[P].2012-02-08.
[36]杨 阳,黄剑峰,秦大同,等.双离合器式混合动力汽车电机起动发动机的控制方法:中国,CN201110389860.5[P].2012-06-13.
[37]朱 军,周宇星,马成杰,等.一种混合动力车辆模式切换扭矩控制方法:中国,CN201110460820.5[P].2013-07-03.
猜你喜欢
四川冶金(2018年1期)2018-09-25
自动化学报(2017年4期)2017-06-15
通信电源技术(2016年1期)2016-04-16
工业设计(2016年11期)2016-04-16
电机与控制应用(2015年3期)2015-03-01
电网与清洁能源(2015年2期)2015-02-28
电测与仪表(2014年22期)2014-04-04
客车技术与研究(2014年5期)2014-02-28
电力工程技术(2012年5期)2012-03-25
山东农机化(2011年2期)2011-08-15
