
罗兰-C脉冲信号周期的联合识别方法
2014-12-23 07:13李实锋高媛媛
江苏大学学报(自然科学版) 2014年5期
李实锋,高媛媛,华 宇
(1.中国科学院国家授时中心,陕西西安710600;2.中国科学院大学,北京100039;3.中国科学院精密导航定位与定时技术重点实验室,陕西西安710600)
罗兰-C系统(包括BPL长波授时系统和“长河二号”导航系统)是一种远程高精度大型陆基无线电导航授时系统,具有作用距离远、稳定性好、可靠性强、通信抗干扰能力强等优点[1].
当前 GNSS(global navigation satellite system,GNSS)系统以其使用便捷、覆盖范围广、定位精度高等突出优点受到普遍重视,但罗兰-C系统在很多领域仍然是重要的高精度授时手段.罗兰-C接收机通过精确测量罗兰-C信号的到达时间TOA(time of arrival,TOA)来实现定时或定位,其中到达时间是指被跟踪的罗兰-C脉冲组信号内的特殊过零点的到达时间[2].然而由于罗兰-C信号的载频为100 kHz,周期为10 μs,罗兰-C接收机锁定跟踪发生错周至少带来10 μs的TOA测量误差,从而致使整个系统的定时或定位精度无法达到预期指标[3].因此,准确寻找并确定罗兰-C信号的相位跟踪点是罗兰-C接收机基带信号处理中需要解决的关键问题.
目前常用的罗兰-C脉冲信号周期识别方法中,峰值算法[3-4]、幅度比值法[5]和函数法[3,6]等仅是利用了罗兰-C信号跟踪点附近几个或若干个点的信息来进行周期识别,波形匹配法[2]、匹配相关法[6]等仅利用了罗兰-C信号的包络信息进行周期识别,相关研究则认为使用更多可能得到的信息可以得到更好的性能.因此,文中提出一种利用载波跟踪信息与罗兰-C脉冲信号包络峰值检测相结合的周期识别新方法,通过仿真以及硬件实现验证了该方法的有效性,为解决现代罗兰-C数字化接收机的周期识别问题提供了一种新的思路.
1 罗兰-C信号特征
罗兰-C脉冲信号发射天线底部的标准电流波形定义为[7-8]

其中:A是与峰值电流有关的常数;t为时间,μs;τ为包周差,μs;65 μs为脉冲包络的上升时间;ω0=0.2π rad·μs-1;pc为相位编码,等于0或 π.
罗兰-C脉冲信号相位跟踪点的选择主要考虑如下因素:①所选择的相位跟踪点必须避开天波的干扰;②必须保证所选择的相位跟踪点所在的周期有足够的信号电平.
其中,消除天波对相位跟踪点识别的影响主要采用选取天波到达之前的信号标准过零点作为相位跟踪点.根据美国海岸警卫队发布的罗兰-C接收机最低性能标准,天波的延迟时间的变化范围为37.5 ~1 500 μs[9],所以通常选择脉冲信号起始点30 μs正向过零点作为罗兰-C接收机的相位跟踪点[10],即标准过零点,如图1所示.

图1 罗兰-C信号特征
2 联合识别方法
2.1 基于峰值检测的周期识别
罗兰-C接收机完成了信号的搜索、捕获以及载波跟踪以后,将得到的罗兰-C信号包络用于峰值检测.根据式(1),标准的罗兰-C信号包络可表示为

对式(2)求导得
令E'(t)=0,得t=τ或t=65+τ,即表明罗兰-C信号包络峰值出现在t=65+τ时.令包周差τ=0,则罗兰 -C包络峰值在t=65 μs处,因此在理想情况下,根据罗兰-C包络峰值位置即可推算出标准过零点的位置,完成相位跟踪点的识别.
2.2 DLL峰值检测原理
DLL(delay-locked loop,DLL)峰值检测是指基于延迟锁定环原理,产生罗兰-C超前包络(早码)和滞后包络(迟码)分别与罗兰-C信号包络进行相关累积,利用相关运算网络来获得所需要的误差鉴相信号,通过适当的反馈环路来实现本地罗兰-C信号包络相位的自动调整,DLL峰值检测原理如图2所示.

图2 DLL峰值检测原理框图
图2中:T为积分时间;Re(τ)为早码相关值;Rl(τ)为迟码相关值;e(τ)为误差鉴相信号,则

2.3 周期联合判决
DLL峰值检测完成以后,根据包络峰值的位置可以推算得到第3周过零点的理论位置,但是由于噪声、干扰等影响,理论位置与实际位置之间可能存在一定的偏差,此时根据载波跟踪信息辅助进行进一步的周期判决,见图3.

图3 周期联合判决原理
根据图3可知,当理论位置与实际位置偏差小于2.5 μs时,与之最近的载波零点即为罗兰-C信号的第3周过零点,据此可实现正确的周期判决,此时周期识别精度取决于载波跟踪精度;当理论位置与实际位置偏差大于2.5 μs时,根据载波跟踪信息进行周期判决后发生错周.
3 联合识别方法性能分析
3.1 DLL峰值检测算法仿真
DLL峰值检测算法仿真验证步骤:首先产生间隔为20 μs的罗兰-C超前包络和滞后包络;然后分别与罗兰-C信号包络进行相关累积运算得到Re(τ)和Rl(τ);最后以误差鉴相信号e(τ)作为峰值判决的依据,并以峰值判决结果控制罗兰-C信号包络相位调整直至e(τ)趋于零,其仿真结果如图4所示.

图4 DLL峰值检测算法验证
仿真结果表明:基于DLL方法得到的误差曲线e(τ)具有较好的鉴相特性,以此可以准确地检测到罗兰-C包络峰值的位置,进而可以推算得到标准过零点的理论位置.
3.2 联合识别方法的有效性验证
针对仿真产生的罗兰-C信号连续进行10 000次的联合周期识别试验,信噪比设为SNR=15 dB,试验结果如图5所示.

图5 联合识别方法的有效性验证
仿真结果表明联合识别方法在SNR=15 dB时的周期识别正确率达98.65%,从而验证了该方法的有效性.
3.3 抗包周差性能分析
罗兰-C信号脉冲包络在发射、传播、接收等过程中,由于设备、噪声等影响会发生一定的畸变.包周差(envelope-to-cycle difference,ECD)定义为罗兰-C信号由于畸变导致脉冲包络位置相对于标准采样点位置的超前或滞后量,其意义在于影响接收机周期识别的可靠性.USCG发布的罗兰-C接收机最低性能标准规定,当 -2.4 μs≤τ≤2.4 μs时周期识别应具有95%的可靠性.
为了验证联合周期识别方法的抗包周差性能,针对仿真产生的不同包周差的罗兰-C信号进行联合周期识别仿真试验,识别结果与包周差的关系如图6所示.
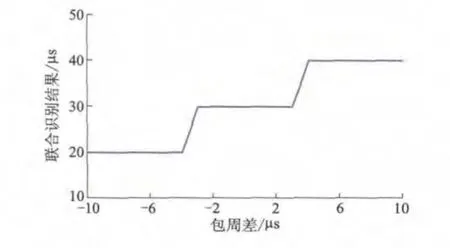
图6 联合识别结果与包周差的关系
仿真结果表明:当|τ|≤3 μs时,联合识别方法能准确的识别第三周过零点;当|τ|>3 μs时,联合识别结果发生错周,周期识别失败.
3.4 抗噪性能分析
相关资料表明[2]:现代罗兰-C接收机经过数字滤波后信噪比可达30 dB以上,一般能达到22 dB.为了验证联合识别方法的抗噪性能,下面对SNR=10~22 dB的罗兰-C信号分别连续进行10 000次仿真试验,结果如图7所示.

图7 联合识别正确率与信噪比的关系
仿真结果表明:当SNR≥20 dB时,联合识别方法能够准确无误的识别标准过零点;联合识别方法的周期识别抗噪性能优于目前常用的周期识别方法,其中波形匹配法为23 dB[2],周期和值算法为24 dB[5],周期累加值算法为 25 dB[11]等,因此联合识别方法具有较强的适用性.
4 联合识别方法在接收机中的应用
4.1 接收机试验验证平台设计
为了验证罗兰-C信号周期的联合识别方法的实际应用,基于现有的PO21长波定时校频接收机的射频通道,搭建了基于AD+FPGA+DSP的罗兰-C接收机试验验证平台,其结构如图8所示.
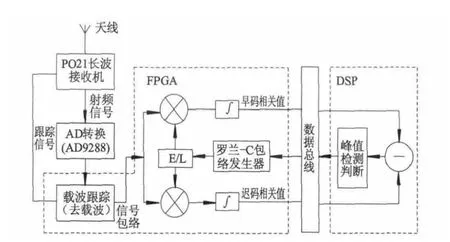
图8 联合识别方法试验验证平台
FPGA主要完成载波跟踪、本地罗兰-C信号超前、滞后包络的产生,并且与接收到的信号包络进行相关累积,然后将早、迟码的相关累积值送给DSP进行处理、判决;DSP主要是完成对早、迟码相关累积值进行鉴相处理,然后根据鉴相结果进行峰值检测判决,并转换成计数器初值送给FPGA以控制罗兰-C包络发生器调整本地罗兰-C脉冲包络相位,直至鉴相误差信号趋于零,即完成峰值检测.
4.2 周期识别性能测试
利用设计的罗兰-C接收机试验验证平台,基于联合识别方法对接收到的BPL长波授时信号进行周期的联合识别,然后将得到的标准过零点识别跟踪信号进行分频得到秒信号,最后将其与标准秒信号进行比对得到该方法对标准过零点的跟踪特性,测试结果如图9所示.
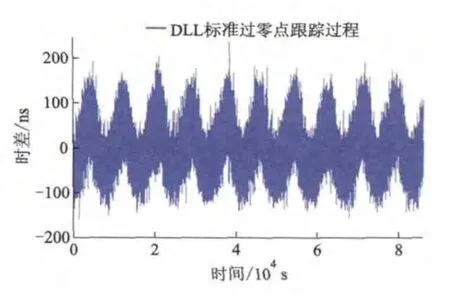
图9 联合识别方法对标准过零点的跟踪特性
试验结果表明:联合识别方法对标准过零点识别的准确度约±150 ns,其与载波跟踪稳定度相吻合[12],且误差偏离达到设定门限时,该算法控制罗兰-C信号标准过零点同步信号的移动以实现对标准过零点的跟踪.
5 结论
罗兰-C接收机的时差测量精度在很大程度上取决于其正确识别周期的能力,然而准确的周期识别是罗兰-C接收机首先遇到最困难、最棘手的问题.文中基于以上的目的,针对目前罗兰-C接收机周期识别基本方法不足的现状,提出了一种罗兰-C脉冲信号周期联合识别新技术,通过仿真验证了该方法优于目前常用的周期识别方法,并且通过将该方法运用于罗兰-C接收机设计,更加充分地验证了该方法的有效性和较强的实用性.
References)
[1]李实锋,王玉林,华 宇.罗兰-C数据解调与解码技术研究[J].仪器仪表学报,2012,33(6):1407-1413.Li Shifeng,Wang Yulin,Hua Yu.Research of Loran-C data demodulation and decode technology[J].Chinese Journal of Scientific Instrument,2012,33(6):1407-1413.(in Chinese)
[2]林慧贞,罗斌凤,胡东亮.波形匹配法识别罗兰-C信号周期[J].舰船电子工程,2008,28(5):81-83.Lin Huizhen,Luo Binfeng,Hu Dongliang.Algorithm of matching wave for cycle identification of Loran-C[J].Ship Electronic Engineering,2008,28(5):81-83.(in Chinese)
[3]张振寒.罗兰-C精密时间同步中有关周期识别问题的探讨[J].宇航计测技术,1984,10(27):18-22.Zhang Zhenhan.Discussion on cycle-identification in Loran-C precise time synchronization[J].Journal of Astronautic Metrology and Measurement,1984,10(27):18-22.(in Chinese)
[4]Fisher A J.The Loran-C cycle identification problem[D].Heslington:Department of Computer Science,U-niversity of York,1999.
[5]邹德财,边玉敬,吴海涛.罗兰-C脉冲信号周期的数字识别及 SOPC实现[J].哈尔滨工业大学学报,2005,37(12):1644-1646.Zou Decai,Bian Yujing,Wu Haitao.Digital algorithm realized with SOPC for cycle identification of Loran-C[J].Journal of Harbin Institute of Technology,2005,37(12):1644-1646.(in Chinese)
[6]陈秋月,杨会成,江太辉.基于匹配相关的罗兰-C信号周期识别[J].无线电工程,2007,37(12):27-29.Chen Qiuyue,Yang Huicheng,Jiang Taihui.A method of cycle identification for Loran-C signal based on matched correlation[J].Radio Engineering,2007,37(12):27-29.(in Chinese)
[7]周 隽,崔国恒,许江宁.罗兰C数据链交叉干扰抑制新方法[J].弹箭雨制导学报,2012,32(4):173-175.Zhou Jun,Cui Guoheng,Xu Jiangning.A new CRI suppression method in Loran C datelink[J].Journal of Projectiles'Rockets'Missiles and Guidance,2012,32(4):173-175.(in Chinese)
[8]林洪文,周洪庆,刘福太.强载波干扰条件下的罗兰-C相位编码识别研究[J].测试技术学报,2012,26(3):252-255.Lin Hongwen,Zhou Hongqing,Liu Futai.Research on phase coding identification of Loran-C signal under the background of strong CWI[J].Journal of Test and Measurement Technology,2012,26(3)252-255.(in Chinese)
[9]张田仓,唐 争.用于罗兰C接收机天波识别的IFFT频谱相除技术探讨[J].信息与电子工程,2004,2(4):274-278.Zhang Tiancang,Tang Zheng.IFFT spectral-division technique for skywave identification receivers[J].Information and Electronic Engineering,2004,2(4):274-278.(in Chinese)
[10]朱银兵,许江宁,崔国恒.罗兰C周期识别时频分析方法研究[J].电子与信息学报,2012,32(3):732-736.Zhu Yinbing,Xu Jiangning,Cui Guoheng.Time-frequency methods for period identification of Loran-C[J].Journal of Electronics&Information Technology,2012,32(3):732-736.(in Chinese)
[11]邹德财,边玉敬,吴海涛.长波授时系统相位跟踪点检测的数字化研究[J].西安交通大学学报,2006,40(6):729-733.Zou Decai,Bian Yujing,Wu Haitao.Digitization research on detection of the phase tacking point in long wave time service systems[J].Journal of Xi'an Jiaotong University,2006,40(6):729-733.(in Chinese)
[12]李实锋.罗兰-C数字化接收机关键技术研究[D].北京:中国科学院研究生院,2009.
猜你喜欢
绿色包装(2022年11期)2023-01-09
文苑(2020年10期)2020-11-07
数理化解题研究(2020年13期)2020-05-07
数学物理学报(2019年5期)2019-11-29
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
特别文摘(2017年13期)2017-11-11
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
课堂内外(小学版)(2015年6期)2015-09-10
