基于视觉的绝缘子“掉串”缺陷的检测与定位
2014-12-23 01:27王银立
计算机工程与设计 2014年2期
王银立,闫 斌
(电子科技大学 自动化工程学院,四川 成都611731)
0 引 言
绝缘子[1,2]是一种特殊的绝缘控件,用于防止输电线路的带电部件形成接地通道。由于绝缘子长期处于恶劣的自然环境中,所以经常会出现 “掉串”故障,此故障会使电网解裂,导致大面积停电,对电力系统的安全稳定造成极大危害。传统的监测主要依赖于人工巡线。这种方法效率低、危险系数很高。近年来,随着计算机视觉[3,4]技术的迅速发展,使绝缘子的远程监控成为可能,可以利用计算机视觉的知识对绝缘子图片进行处理,自动识别绝缘子缺陷。传统的识别绝缘子 “掉串”的算法[5]首先需要提取绝缘子的 “二值化”边界,然后计算绝缘子边缘的链码与形状数,最后通过分析形状特征判断故障。但对于复杂的自然环境,图像的分割本身还是一个世界性难题。所以由此得出的算法的稳定性并不高,不能适应工业现场的复杂环境。
为此,针对复杂自然环境下的绝缘子,提出一种不依赖于完整分割边缘的绝缘子 “掉串”识别算法。充分利用玻璃绝缘子的颜色特征,在Lab空间对图像进行相关处理,获得边缘不完整但可以代表绝缘子位置和区域范围的二值图像。然后构建数学模型计算绝缘子区域内的有效像素点的比例来判断是否有 “掉串”缺陷。实验结果表明,通过此算法可以实现 “掉串”绝缘子的检测与准确定位,相对于传统算法识别率明显提高。
1 复杂背景的去除
1.1 Lab空间阈值化
电力设备现场主要有两个特点:①背景的复杂性,对于自然环境而言,绝缘子的背景是纷繁复杂的,即使同一地点在一年四季当中变化也非常大,无规律可循。②光照的多变性,在不同地点和不同时间,光照都是不断变化的。
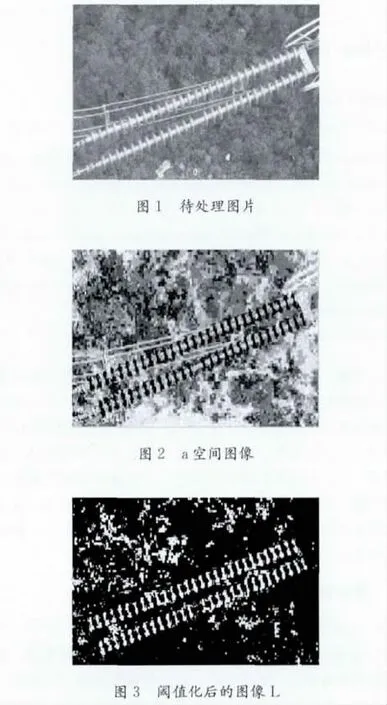
基于以上两个特点,观察待处理的绝缘子 (如图1 所示)可知,绝缘子带有很明显的颜色特征,选用RGB颜色模型可以描述其颜色特征。但由于RGB模型的3个分量都与光照有关,所以由此模型得到的颜色特征并不稳定。故可以将其转换到其它颜色空间,考虑到绝缘子独特的颜色特征,该算法选择Lab颜色空间。
Lab模型是由亮度 (L)分量和与颜色相关的两个颜色分量 (a、b)组成。a取值为+127~-128 (洋红-绿);b取值为+127~-128 (黄-蓝)。根据绝缘子的颜色特征,提取图像的a通道分量并对其进行直方图均衡化得到L,如图2所示。观察图2可知蓝色绝缘子在a通道中占据了低阈值部分故可以对其阈值化将其目标大致分割出来,阈值设定为经验值30,阈值化的结果如图3所示。
1.2 绝缘子的 “粗”分割
1.2.1 “最大类间方差法”的原理介绍
“最大类间方差法”[6-8]是一种自适应的阈值确定的方法,它是按图像的灰度特性,寻找最优阈值使得目标和背景的方差最大。
对图1进行灰度化得到图像I,绝缘子串为前景,自然环境为背景。设:前景像素点占整幅图像的比例为r0,其所在区域的平均灰度为u0;背景像素点所占比例为r1,平均灰度为u1。整幅图像的平均灰度设为U,前景和背景之间的方差设为W,待求的阈值设为T。则:
图像的平均灰度为

两类之间的方差为

将式 (1)、式 (2)带入计算可得

遍历图像所有的灰度值,W 取最大值时的灰度即为待求的最优分割阈值T。
1.2.2 面积形态学
面积形态学[10]与传统的形态学相比不同之处在于使用面积结构元素代替普通的结构元素。在传统形态学中,处理结果与结构元素的形状和大小密切相关,面积形态学的结果只与结构元素的面积有关。面积形态学共包含两类运算:面积开运算和面积闭运算。
在一幅二值图像中,连通域被定义为

其中,Pd>l表示在二值图像中p到q的连通路径,则面积开运算可以定义为

其中,|Cs(P)|表示连通域的面积,由式 (5)可知经过面积开运算后,面积小于阈值t的连通域被去掉,面积闭运算的效果刚好相反,不再赘述。
1.2.3 过滤背景干扰
a空间图像阈值化后依然含有很多背景干扰,如图3所示,可以按照以下步骤进行后续处理,去除复杂背景。
(1)对待处理图像 (图1)进行灰度化得到图像I,对I用 “最大类间方差法”进行阈值分割得到图像G,如图4所示。可以将绝缘子分割出来,但仍然无法去除复杂的背景,须配合颜色空间做进一步分割。

图4 最大类间方差法分割结果G
(2)用G (图4)中的像素与L (图3)中的像素进行逻辑“与”运算,将运算结果重新赋值给L,综合利用颜色空间和灰度空间的信息可去除复杂的背景,结果如图5所示。

图5 L与G 逻辑 “与”运算
(3)为了去除图像中的小块噪声干扰,用面积形态学的方法[9,10]去除图像5 中面积较小的连通域,在该算法中选择去除连通域面积小于20的小块区域。
如图6所示为分割结果,去除了复杂的自然背景。虽然绝缘子的边缘并没有被完整保留下来,但结果中包含了绝缘子的位置信息和区域信息,可以作为绝缘子粗分割的结果。

图6 去除小的连通域
2 “掉串”缺陷地检测与精确定位
2.1 计算绝缘子的中心坐标和区域坐标
为了处理方便、提高定位精度,将上下两个绝缘子串分开处理。首先对获取的绝缘子进行直线拟合并计算线段的长度,为了数学计算的方便,用示意图来表示这一步的结果,如图7所示。

图7 直线拟合结果
SE所在的直线为拟合的直线,θ为直线与水平方向的夹角。O 点为绝缘子的中心坐标。A、B、C、D 表示绝缘子区域的4个端点坐标。
假设拟合的直线方程为Y=k*X+b,由此可得

2.1.1 计算绝缘子的中心坐标
(1)确定绝缘子串的起始点坐标S和终点坐标E,本文采用以下原则确定:
1)起始点距图像的左侧最近;终点距图像的右侧最近。
2)为了防止孤立噪声点的干扰需检测起始点和终点的八邻域内是否至少存在4个同属于绝缘子的像素点。
(2)令SE的长度为length则

(3)计算线段SO 的长度 (令|.|表示线段长度),O点为绝缘子的中心,设绝缘子的个数为N。
则

(4)由图7根线段和角度之间的关系可以计算出O 点的坐标 (令Xs和Ys表示S点的横坐标和纵坐标)

2.1.2 计算绝缘子的区域坐标
若要确定矩形ADBC需知矩形的长|AC|、宽|AD|以及顶点A的坐标。
取|AC|为两个绝缘子之间的距离即

令|AD|为所有绝缘子像素点到直线SE 的平均距离(设此平均距离为m)的2倍,即

另由图7可得

由式 (6)-式 (16)可求得A 点的坐标。

另一个方向 (θ<0)的绝缘子推导过程类似,这里仅给出最终结果。式 (18)和式 (19)分别为绝缘子中心点O坐标和顶点A坐标
如图8所示为根据计算结果绘制的绝缘子中心和区域,图中的灰色矩形边框为绝缘子的区域,边框中心即为绝缘子中心。
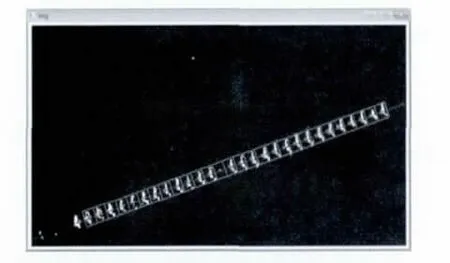
图8 绝缘子的中心和区域标记
2.2 检测与定位 “掉串”缺陷
设绝缘子区域内的白色像素点所占比例为rate,白色像素点的个数为:count(i),可以通过下面的原则来判断是否有缺陷

threshold是设定的阈值,在处理过程中我们取threshold为所有rate的平均值的一半即

如图9所示是按照式 (20)、式 (21)计算的绝缘子像素点所占的比例和判别故障需要设定的阈值。两个白色边框标记了有缺陷的绝缘子和设定的阈值,可以看出根据阈值和式 (20)可以成功判断并定位缺陷位置。
3 实验结果与分析
3.1 测试结果展示
本文以某远程智能巡线系统为工程背景,该系统的目标是实现输电线路的远程智能监控。在输电线路现场安装图像传感器,将需要监控的输电设备图片通过远程网络传回主监控室,主监控系统是一个BS (brower/server)系统,允许客户远程登录进行巡视。
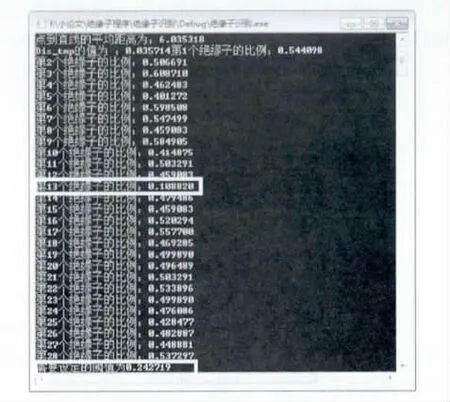
图9 阈值的选定
为了测试该算法的稳定性,现场采集了400 张绝缘子图像为实验对象,实验环境为opencv+vs2008,opencv(open source computer vision library)[11,12]是由Intel公 司 提供的可以跨平台使用的开源计算机视觉库,包含了500多个C/C++高层API图像处理接口,不依赖于外部库。使用vs2008+opencv的架构可以大大缩短开发时间,开发语言使用C/C++可以满足工业现场实时性高的要求。
部分测试结果如图10所示,有缺陷的地方用黑色的方框标出。
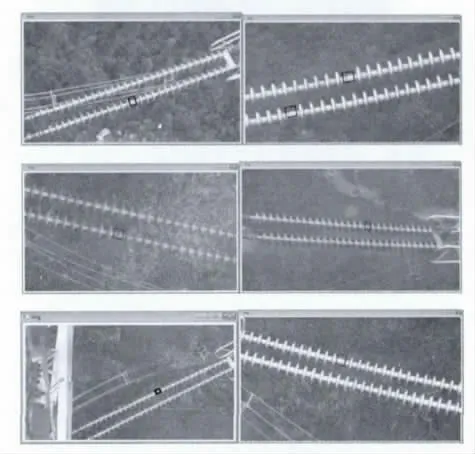
图10 测试结果
由图10可知,因为不依赖于完整的分割边缘,此算法可适应复杂的自然环境,而且可以精确地定位到 “掉串”绝缘子的位置。另外由于矩形区域的长宽和判定阈值都是自适应的,故该算法对绝缘子的角度和尺度的变化,也有很好的鲁棒性。
3.2 与传统算法对比分析
对于采集的400 幅图片,我们将其人为分类,如表1所示,然后分别用传统的识别算法和本文的算法进行测试,测试结果见表2。

表1 测试图片分类

表2 传统算法与本文算法对比结果
由表2的测试结果可以得出如下结论:
(1)对于单一背景的绝缘子,传统算法与本文算法的识别率都很高,可达到90%以上。
(2)对于复杂背景的绝缘子,传统算法由于依赖于完整的分割边缘,识别率较低,低于10%。而本文的算法却可以较好地适应这种场景,识别率可达到85%以上,相对于传统算法具有绝对的优势。
4 结束语
本文针对复杂环境下的绝缘子 “掉串”缺陷,提出一种不依赖于完整分割边缘的缺陷识别算法。该算法可以适应复杂的自然背景,平均识别率可达到91.32%,并且可以准确定位到缺陷绝缘子的位置。算法识别失败的绝缘子主要是受到恶劣天气的影响,比如大雾、大雨。今后的研究改进应针对大雾、大雨的自然环境提出能适用复杂天气的识别算法。
[1]ZHANG Hongzhi.Handbook of typical defects analysis for 500kv transmission line [M].Beijing:China Electric Power Press,2009 (in Chinese).[张宏志.500kv输电线路典型缺陷分析手册 [M].北京:中国电力出版社,2009.]
[2]WU Guangya.Development of China's insulator and the issue should be considered [J].Insulators and Surge Arresters,2010,4 (2):7-11(in Chinese).[吴光亚.我国绝缘子的发展现状及应考虑的问题[J].电磁避雷器,2010,4 (2):7-11.]
[3]ZHANG Zheng,WANG Yanping,XUE Guixiang.Image process and computer vision [M].Beijing:People Post Press,2010 (in Chinese).[张铮,王艳平,薛桂香.图像处理与计算机视觉 [M].北京:人民邮电出版社,2010.]
[4]Zhang Bo.Computer vision vs human vision [C]//9th IEEE International Conference on Cognitive Informatics,2010.
[5]TONG Weiguo.Research on methods for recognition and status detection of power line based on aerial images [D].Beijing:Electrical Engineering Theory and New Technology School of Electrical Engineering,2011:91-99 (in Chinese). [仝卫国.基于航拍图像的输电线路识别与状态检测方法研究 [D].北京:华北电力大学电工理论与新技术专业,2011:91-99.]
[6]ZHAI Zhong.Research on image segmentation based on the improved Otsu algorithm [J].Computer Science,2009,36(5):276-278 (in Chinese). [瞿中.基于改进的最大类间方差算法的图像分割研究 [J].计算机科学,2009,36 (5):276-278.]
[7]Shu H J,Xue G L,Xin L.An improved Otsu method for image segmentation[J].Signal Processing,2006,8 (2):1-4.
[8]Alsaeed D H,Bouridane A,Elzaart A.Two modified Otsu segmentation methods based on lognormal and Gamma distributions models[C]//ICITeS,2012:1-5.
[9]GE Yumin,LI Baoshu,LIANG Shuang.Application of mathematical morphology to edge detection of insulator image[J].High Voltage Apparatus,2012,48 (1):101-104 (in Chinese). [葛玉敏,李宝树,梁爽.数学形态学在绝缘子图像边缘检测中的应用[J].高压电器,2012,48 (1):101-104.]
[10]XIONG Zheyuan,FAN Xiaoping,LI Yan.A new binary area morphology based algorithm for license plate localization[J].Computer Simulation,2008,25 (11):285-287 (in Chinese).[熊哲源,樊晓平,黎燕.一种新的基于二值面积形态学的车牌定位算法[J].计算机仿真,2008,25(11):285-287.]
[11]YU Shiqi,LIU Ruizhen.Learning Opencv [M].Beijing:Tsinghua University Press,2009 (in Chinese). [于 仕 琪,刘瑞 祯. 学 习 OpenCV [M]. 北 京: 清 华 大 学 出 版社,2009.]
[12]YIN Junchao,LIU Zhifang.Detection and tracking of moving objects based on OpenCV [J].Computer Engineering Design,2011,32 (8):2817-2820 (in Chinese).[尹俊超,刘直芳.基于OpenCV 的运动目标检测与跟踪 [J].计算机工程与设计,2011,32 (8):2817-2820.]
猜你喜欢
现代电子技术(2021年1期)2021-01-17
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
中国继续医学教育(2015年2期)2016-01-06
电力建设(2015年2期)2015-07-12
电测与仪表(2014年6期)2014-04-04
电气传动自动化(2014年6期)2014-03-20
振动、测试与诊断(2014年6期)2014-03-01
河南科技(2014年1期)2014-02-27