
组合导航系统仿真平台的设计与实现
2014-12-23 01:20张勇刚
计算机工程与设计 2014年3期
李 宁,丁 薇,张勇刚
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨150001)
0 引 言
任何单一的导航系统难于满足军用运载体的导航需求,因此组合导航成为研究和仿真的主要方向[1,2]。传统的关于组合导航系统的仿真大多是基于Matlab进行的某一组合模式下导航滤波算法的仿真性能验证或比较,文献[3]中提出了采用H∞滤波算法在模型辅助捷联惯导单一的组合模型下通过Matlab软件对其进行仿真。文献[4]中提出了采用改进Kalman滤波算法对GPS/DR 组合模型在Matlab环境下进行仿真。然而在研究的组合模式或滤波方法发生变化时,仿真需要重新进行,大大降低了研究效率。
基于LabVIEW/Matlab实现的组合导航仿真平台在保证算法高效运行的同时,为研究者提供了可视的配置界面。通过仿真平台便捷的配置组合模式及滤波算法,能够实现某一组合模式下不同滤波方法之间的性能比较,比较结果以误差曲线的形式在仿真平台上显示。并且,仿真平台所包含的组合模式和组合滤波方法可随着研究的进行而不断扩展,增加了系统的扩展性和实用性。因此,本文所研究的组合导航仿真平台对组合导航方法研究具有一定的意义。
1 组合导航系统模型与算法
在误差传播性能上惯性导航系统(inertial navigation system,INS)和全球卫星导航系统(global positioning system,GPS)各有优缺点,具有良好的互补性,INS/GPS组合导航系统将二者有机地结合起来,建立以惯导为基础,GPS为辅助的组合导航系统[5,6]。综合利用二者的特点,以实现优势的互补,提高系统导航精度、容错性及可靠性。
1.1 INS/GPS组合导航系统模型
选取系统状态向量为

则INS/GPS组合导航系统的状态方程为

式中:F——组合导航系统矩阵,G——组合导航系统噪声分布矩阵。
取加速度计随机白噪声ωg和陀螺漂移白噪声ωa为系统白噪声

在INS/GPS组合导航系统的量测方程分别选取两个导航系统的位置信息差值和速度信息差值作为INS/GPS组合导航系统的量测量[7],方程如下

其中,Zv= [δveδvn]T,Zp= [δφδλ]T为观测向量,H为系统观测矩阵,且满足

在平台失准角较小的情况下,INS/GPS组合导航系统模型可近似为线性模型,此时常用标准的Kalman滤波算法进行估计。
由于低成本惯性元件引起载体机动性增大,测量精度下降,惯性导航平台失准角增大,此时组合导航系统模型近似为非线性模型,采用Kalman滤波对该组合模型进行估计滤波精度下降甚至会出现发散现象,采用非线性滤波方法可以保证滤波精度,抑制滤波发散。
对偶存在模态算子
1.2 组合导航滤波算法
由于组合导航模型有线性模型和非线性模型之分,组合导航滤波算法也分为线性滤波算法和非线性滤波算法,其中线性滤波算法仅适用于线性模型,而非线性滤波算法同时适用于线性模型和非线性模型。本文采用的线性滤波算法是卡尔曼滤波和H∞滤波,非线性滤波算法采用的是扩展卡尔曼滤波和无迹卡尔曼滤波。这里需要说明一点,H∞滤波算法也可用于非线性模型,但是在本文中将其用于线性模型,以便和卡尔曼滤波算法进行对比。
本文仅选取了一种线性组合模型和一种非线性组合模型,以及基于线性模型实现了卡尔曼滤波和H∞滤波,基于非线性模型实现了扩展卡尔曼滤波和无迹卡尔曼滤波。在实际研究中可根据研究情况对组合模型及滤波方法模块进行扩展。
2 组合导航仿真平台设计
2.1 组合导航仿真平台工作原理
组合导航仿真平台的目的是通过仿真的形式实现不同组合模式下及不同滤波算法下组合导航性能的横向比较。
在进行组合导航之前,我们首先需要获得导航子系统的导航数据,这是利用轨迹发生器来产生模拟的传感器数据得到的,然后经过组合滤波算法对系统进行输出校正。如图1所示,组合导航系统仿真包括:轨迹发生器、模拟惯性器件输出、模拟GPS输出及组合导航滤波算法,互相独立但构成一个完整的,缺一不可的整体。

图1 组合导航仿真平台工作原理框架
2.1.1 轨迹发生器
轨迹数据是测试验证组合导航仿真平台的必要输入信息。设计仿真轨迹,从轨迹信息中解算载体的位置、姿态和速度等信息,设定运动参数,任意设置其初始值。为组合导航系统参数提供理论基准,对惯性导航系统输出的仿真提供基础。
组合导航系统仿真需要惯性导航的位置、速度数据,惯性导航系统位置、速度信息通过惯性测量元件陀螺仪和加速度计分别输出的角速度和比力解算得到,输出方程如下

经过惯导解算可以得到惯性导航系统输出的位置、速度和姿态信息。
2.1.3 模拟GPS输出
根据无误差的速度和位置信息,再参考GPS输出参数的精度,在其基础上加上相应的测量误差,于是就得到模拟GPS输出的位置信息和速度信息[8]。
2.2 组合导航仿真平台总体设计
按照组合导航系统的工作流程,首先须选定组合导航子系统。目前的组合导航方式多以惯性导航为主系统[9-11],其它导航系统为辅,因此在仿真初始需要对导航系统的参数尤其是惯性系统的参数进行设置,同时需对载体运动的初始状态参数进行设置。选定组合导航子系统的构成后,可以进行组合模型设置,这里是指设置为速度组合、位置组合或者速度/位置组合。然后需要选定组合滤波的算法,即需要进行性能比较的算法。这样在组合导航仿真平台的输出显示部分将会实现在特定的组合模型下几种组合滤波方法的横向比较。因此,组合导航仿真平台的总体设计如图2所示。

图2 组合导航仿真平台的总体设计
根据组合导航仿真平台的工作流程,对仿真平台的整体结构框架进行设计。将组合导航仿真平台分成如下模块:器件参数设置模块、初始状态设置模块、组合方式及系统模型设置模块、组合滤波算法设置模块、平台输出显示模块,通过仿真平台能够实现在某种组合方式下不同的滤波算法结果的清晰比较。
3 基于Matlab/LabVIEW 的组合导航系统仿真平台实现
本文对组合导航仿真的整体框架进行分析,将组合模式及组合滤波方法进行模块化处理,并基于Matlab/Lab-VIEW 实现可视化的仿真平台。LabVIEW 是一种用图标代替文本创建应用程序的图像化编程语言,与Matlab兼容性较好,不必通过调用封装后的dll文件,而是可以通过Matlab Script直接调用Matlab 语言程序。LabVIEW 将分立元件模块化,有利于降低程序开发的复杂程度,增强系统的功能和灵活性。
如图3所示,是LabVIEW 的前面板。前面板主要是完成仿真平台的器件参数及初始状态设置和仿真结果呈现(误差曲线)。采用Matlab实现模拟惯导数据产生、模拟惯导解算和组合滤波算法,初始状态和器件参数通过仿真平台界面输入,最终仿真输出误差曲线通过平台前面板呈现。

图3 组合导航仿真平台前面板
4 组合导航系统仿真平台的结果验证
以INS/GPS组合导航系统的线性模型利用卡尔曼滤波和H∞滤波进行状态估计,以及大失准角下的INS/GPS组合导航系统非线性模型,利用EKF 和UKF 进行估计,验证组合导航仿真平台的各项基本功能。
4.1 线性模型下不同滤波算法的对比
设载体从北纬45.7796°东经126.6705°,航向为45°,以10m/s的速度匀速运动,取陀螺常值漂移为0.01°/h,加速度计零偏为10-5g0,仿真时间为600s。
(1)在300s时施加一个外部扰动,组合导航系
统在Kalman滤波和H∞滤波后的误差曲线如下。利用Kalman滤波和H∞滤波对组合导航系统进行状态估计,Kalman滤波和H∞滤波后的位置误差单位为度,速度误差单位为m/s,仿真结果如图4、图5所示。

图4 在较大扰动下的Kalman和H∞位置误差曲线

图5 在较大扰动下的Kalman和H∞速度误差曲线
从图4、图5中可以看出,在0-300s内Kalman的滤波效果比H∞要好,但是在300s以后,由于外界扰动的作用Kalman滤波开始发散,而H∞滤波的滤波效果几乎没有变化,这说明Kalman滤波的稳态滤波精度较H∞高,但是鲁棒性较H∞滤波差,而H∞滤波的稳态精度较Kalman滤波低,但是鲁棒性较好。
(2)较小失准角条件下EKF和UKF对比
仿真条件为:初始平台误差角α、β、γ分别为0.01°、0.01°、0.01°。位置误差单位为度,速度误差单位为m/s,仿真结果如图6、图7所示。

图6 在较小失准角下EKF和UKF位置误差曲线

图7 在较小失准角下EKF和UKF速度误差曲线
从图6、图7 中可以看出,在较小失准角下EKF 和UKF的滤波精度相差不大,但是UKF略好于EKF。
4.2 非线性模型下不同滤波算法的对比
设载体从北纬45.7796°东经126.6705°,航向为45°,以10m/s的速度匀速运动,取陀螺常值漂移为0.01°/h,加速度计零偏为109-5g0,仿真时间为600s。仿真条件为:初始平台误差角α、β、γ分别为0.5°、2.5°、0.5°。其中位置误差单位为度,速度误差单位为m/s,仿真结果如图8、图9所示。
从图8、图9中可以看出,在较大失准角下UKF 的滤波效果明显好于EKF。由于EKF滤波将组合导航系统的非线性模型进行一阶泰勒近似(线性化),舍弃了高阶项,而UKF没有将模型线性化而是利用UT 变换,同时没有忽略高阶项,保证了状态估计的精度。

图8 在较大失准角下EKF和UKF位置误差曲线
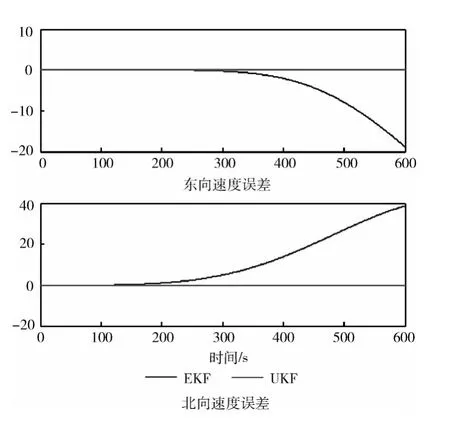
图9 在较大失准角下EKF和UKF速度误差曲线
通过以上仿真的形式对不同组合模型及不同滤波算法的组合导航性能进行了横向比较,验证了组合导航仿真平台的功能。
5 结束语
基于组合导航系统的工作流程设计组合导航仿真平台的功能模块,并基于Matlab/LabVIEW 对组合导航仿真平台各模块进行具体实现,达到了仿真平台可视化界面配置的功能要求。以INS/GPS组合模型为例,通过仿真平台仿真对比Kalman和H∞滤波、EKF和UKF滤波方法在组合导航系统中性能,验证组合导航仿真平台的实用性。说明该仿真平台能够实现不同滤波算法的导航性能之间的性能比较,达到了预期效果。在实际应用中,根据研究的组合系统模型及组合滤波方法可对该仿真平台进行扩展。
[1]Jacques Georgy,Aboelmagd Noureldin,Michael J Korenberg,et al.Modeling the stochastic drift of a mens-based gyroscope in gyro/odometer/GPS integrated navigation [J].IEEE Transactions on Intelligent Transportation Systems,2010,11 (4):856-872.
[2]Sul Gee Park,Ho Cheol Jeong,Jeong Won Kim,et al.Magnetic compass fault detection method for GPS/INS/magnetic/compass integrated navigation system [J].International Journal of Control,Automation,and Systems,2011,9 (2):276-284.
[3]LI Ning,DING Wei.Model-aided strapdown inertial navigation integrated method for AUV based on H∞filtering [C]//ShiYan:International Conference on Computational and Information Sciences,2013:1089-1093
[4]YOU Shengyu,JIANG Lin,LI Xiang.GPS/DR data fusion based on fading adaptive Kalman filter [J].Computer Engineering and Design,2010,31 (21):4720-4723 (in Chinese).[游胜玉,姜林,李祥.基于渐消记忆自适应Kalman 滤波的GPS/DR 数据融合 [J].计算机工程与设计,2010,31 (21):4720-4723.]
[5]WEI Wei,QIN Yongyuan,ZHANG Xiaodong,et al.Comparative analysis of h-infinity filtering in INS/GPS integrated navigation application [J].Journal of Xi’an Technological University,2012,32 (11):874-885 (in Chinese).[魏伟,秦永元,张晓冬,等.H∞滤波在惯导/GPS组合导航应用的比较分析 [J].西安工业大学学报,2012,32 (11):874-885.]
[6]Jae Hyung Kim,Joon Lyou,Hwy Kuen Kwak.Vision coupled GPS/INS scheme for helicopter navigation [J].Journal of Mechanical Science and Technology,2010,24 (2):489-496.
[7]LI Yang,HU Baiqing.Research on integrated navigation algorithm based on improved fading-memory filter[J].Computer Simulation,2012,29 (3):117-119 (in Chinese).[李杨,胡柏青.基于改进衰减记忆滤波的组合导航算法研究 [J].计算机仿真,2012,29 (3):117-119.]
[8]HAN Lu,JING Zhanrong,DUAN Zhemin.Simulation of SINS/GPS integrated navigation system [J].Computer Simulation,2009,26 (9):32-36 (in Chinese). [韩璐,景占荣,段哲民.SINS/GPS组合导航系统仿真研究 [J].计算机仿真,2009,26 (9):32-36.]
[9]LI Peijuan,XU Xiaosu,ZHANG Tao.Application of information fusion to integrated navigation system of underwater vehicle[J].Journal of Chinese Inertial Technology,2009,17(3):344-349 (in Chinese).[李佩娟,徐晓苏,张涛.信息融合技术在水下组合导航系统中的应用 [J].中国惯性技术学报,2009,17 (3):344-349.]
[10]Abuhashim TS,Abdel-Hafes MF,Al-Jarrah MA.Building a robust integrity monitoring algorithm for a low cost GPS-aided-INS system [J].International Journal of Control,Automation,and Systems,2010,8 (5):1108-1122.
[11]Kim S B,Bazin J C,Lee H K,et al.Ground vehicle navigation in harsh urban conditions by integrating inertial navigation system,global position system,odometer and vision data[J].Radar,Sonar and Navigation,2011,5 (8):814-823.
猜你喜欢
数学物理学报(2022年4期)2022-08-22
中学生数理化·高一版(2021年2期)2021-03-19
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
电子制作(2019年23期)2019-02-23
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
