
基于改进型混合高斯模型的运动目标检测
2014-12-23 01:19吴志红吕学斌陈志飞
计算机工程与设计 2014年3期
孙 旭,吴志红,吕学斌,陈志飞
(1.四川大学 计算机学院,四川 成都610064;2.视觉合成图形图像技术国防重点学科实验室,四川 成都610064)
0 引 言
目前,视频序列中检测运动目标有多种方法,例如,帧差法,背景差法等。文献 [1,2]对帧差法,背景差法作了详细的阐述,其中,背景差法运用最为广泛,如何建立好的背景是背景差法成败的关键。对于环境随着时间变化的场景,用静态的背景并不能满足需求,因此提出用高斯建模的方法来实时更新背景模型。对于复杂的图像,尤其是复杂场景的运动图像或医学图像,每个像素的像素值变化一般是多峰的。因此可以将这种多峰特性看作是多个高斯分布的叠加,文献 [3-5]提出了利用混合高斯模型(GMM)来建立背景模型,文献 [6,7]对混合高斯建模方法做了详细的分析,文献 [8,9]对此方法在智能交通系统中的应用做了详细介绍。
但是传统混合高斯模型也有它的缺点,例如,更新背景噪声较大,参数更新运算量大,实时性不够,文献 [10]就是将参数更新率设定为固定值,从而增强了该算法的实时性。本文在传统混合高斯模型的基础上,对模型匹配和参数更新两方面做了改进,不仅提高了混合高斯模型的检测效果,抑制了由于检测不准确带来的噪声,而且提高了实时性,满足了对检测实时性的要求。
1 混合高斯模型
一般按照运动特性,可以将一幅图像分为运动前景和背景两部分,运动前景指图像上发生运动的部分,背景则为不变的部分。单分布高斯背景模型认为,对一个图像背景部分的像素,其像素值应该满足高斯分布,即在背景图像B 中,像素I x,( )y 点的像素值满足

因此对视频图像中的每个像素点建立高斯分布模型,判断当前图像帧中的每个像素点是否为背景点,进而来区分背景与前景,从而可以对图像中运动像素进行检测。
上述方法是假设该像素点符合一个高斯分布,即单高斯模型。单高斯模型方法在处理具有单个影响因素,如只有光照变化影响时,可以达比较满意的效果。但是对于一些复杂的图像,如包含光照变化,树叶的抖动等因素时,更新的前景往往含有大量噪声。对这些复杂场景图片的统计特性进行研究可以发现,其图像某一像素点在一段时间范围内的像素值具有 “多峰”的特性,即可看作为多个高斯分布的叠加。由此可以考虑采用多个高斯模型自适应的线性组合来建立背景模型,即用混合高斯模型 (GMM)来建立背景。
混合高斯建模的思想为:对每一个像素点,定义K 个状态的高斯函数来表示它,然后用当前像素值来匹配每个高斯模型,若匹配则说明该像素为背景的一部分,进而可以用该点来跟新背景,不匹配的点则属于前景的一部分,可以采用以下方法来判定当前像素是否与第i 高斯模型匹配

其中:T(i,t)=λσ(i,t),λ一般可取2.5。
在混合高斯模型中,可能有一个或者多个高斯分布通过上述方法判定为匹配,及判定该像素点可能为背景点,此时需要更新当前高斯分布对应的权值

式中:β——高斯模型的权值更新率,其大小影响背景的更新速度。
在更新了高斯模型的权值后,相应的要更新当前匹配的高斯分布的期望μ和方差σ2,其更新方法如下所示

其中

若当前的像素值I x,( )y 找不到一个与之匹配的高斯分布,则可以认为在K 个高斯模型的集合中出现了新的高斯分布,此时,用新的高斯分布代替当前权重最小的高斯分布,并用当前像素值初始化μ,用一个较大值初始化σ2,并用一个较小值初始化。而对于其它的高斯模型的权值采用下面公式更新

由上述过程可以发现,与当前像素匹配的高斯分布权重增加了,而不匹配的高斯分布的权重则降低了。然后对权值进行归一化处理



式中:T——背景选取的阈值,简单背景可以设置较小的T值,复杂背景可以设置较大的T 值,一般T 的取值为0.7。
如果在阈值T 范围内,没有一个高斯分布与当前像素匹配,则认为该点是前景点,反之该点为背景点。
2 改进型混合高斯建模
2.1 匹配方法改进
在上述传统混合高斯模型匹配过程中,将当前像素与期望值做差,并判断此差值的绝对值是否大于某一阈值来进行匹配判断。通过实验发现,此方法在复杂环境和多运动目标的情况下,很多像素点出现了误匹配,即有可能将运动像素判断为背景像素,这样就会使背景中出现大量噪声,影响检测效果。
不同于传统的欧氏距离匹配方法,对于协方差不为零的情况,可以由马氏距离计算两个图像像素集的相似度,进行匹配运算。由于马氏距离与协方差有关,所以它与欧式距离不同的是它考虑到每个分量的协方差。
在样本空间G 中,定义其维度为k,均值为μ,协方差矩阵为Σ,则根据马氏距离的定义可知

当k=1时

将上述公式变形即可得到

通过上述分析,于是提出了一种改进型的匹配方法。如果当前像素值小于该点与样本点的马氏距离时,则认为该像素点与其对应的高斯分布相匹配,反之不匹配,该匹配方法如下所示

由式 (12)可知道阈值T =λ2σ2,λ则取值一般为2.5。
采用计算马氏距离来判断是否匹配,可以更好的提高匹配的效果,减少像素的误匹配,更新出更为干净的背景,下面是在三通道RGB图像下,此方法的算法描述。
算法一:

2.2 参数更新改进
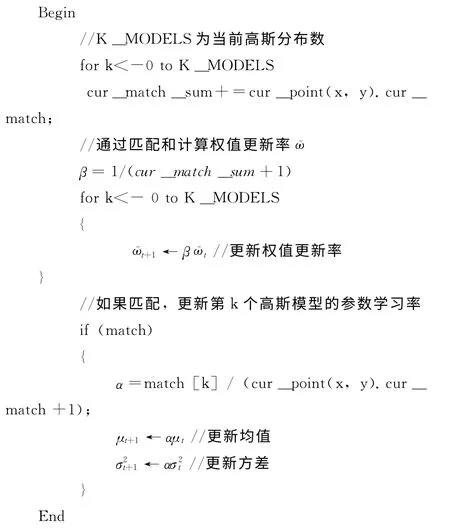
在更新高斯模型集合中每个高斯分布的权值时,部分文献[10]为了提高算法的实时性,均引进了固定的权值更新率β。
通过大量实验可以发现,在开始阶段,当前环境与初始高斯分布并不符,于是需要快速的更新背景,即需要较大的参数更新率β。在随着对当前环境的学习,当前模型与当前环境慢慢相符,此时则需要放慢更新速率,只对当前环境变化做出微弱的调整。根据上述分析,本文提出了一种自动更新权值更新率β的方法。
首先,要引入了当前匹配和的概念,即当前某像素对应的高斯模型集合中,每个高斯分布被匹配的次数可以用cur_match 表示,而这一高斯模型集合中的所有cur_match之和可以用cur_match_sum 表示,此时cur_match_sum 则为当前匹配和,及当前像素的高斯模型集合中所有分布被匹配的次数之和。
在对每个高斯分布进行匹配时,采用以下方法记录cur_match 与cur_match_sum 的值
当高斯模型集合中每个高斯分布被更新时,完成了上述的记录,此时可以动态更新权值跟新率β的值
同时在更新每个高斯分布时的参数学习率α时,也可以用当前第i(0<i≤K )个高斯分布被匹配的次数cur_match 来计算参数学习率α,这样可以使α更加快速的更新,从而提高了检测的实时性。
下面即为参数学习率α的更新方法


此方法通过对匹配数的累加,动态的修改参数更新率β和参数学习率α,不仅对背景更新速率进行了动态的调整,而且增加了算法的实时性,其算法描述如下:
算法二:
2.3 算法流程
本文提出的改进型GMM 首先将输入像素按照2.1 提出的方法判断是否满足匹配条件,若满足匹配条件则按照2.2的参数更新方法进行参数更新,若不满足匹配条件,则按照传统GMM 方法更新权值。最后,获取前景像素,得到前景运动目标。
算法流程图如图1所示。
3 实验结果与分析
实验参数及耗时统计见表1。
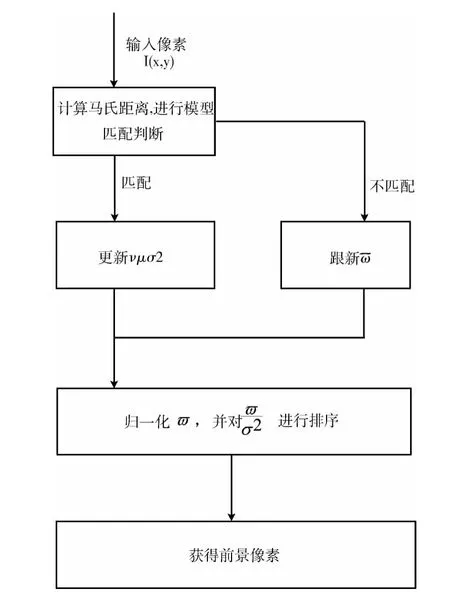
图1 改进型混合高斯模型算法流程

表1 实验参数及耗时统计
本实验在双核2.3G处理器,Windows XP操作系统下,用大小为400*300,帧率为25的图像序列进行测试。实验中高斯分布数K值越大,背景建模越精确,但是会使运算量增加,影响实时检测效果,本文均将K 值取为3,其中在匹配算法中将λ取值为2.5,背景选取阈值T 取值为0.7,权值更新率β在传统GMM 中取值为0.25。最后,实验结果对前景图均进行了3*3模板的平滑滤波去噪,再用3*3的模板进行了膨胀处理[11],方便用肉眼观察前景运动目标。
图2至图5为不同场景下的效果图,图中选取了两个不同的场景,场景1环境相对简单,传统GMM 方法和改进型GMM 都能达到满意的效果,背景图像更新都很干净,前景几乎没有噪声点。场景2环境相对复杂,不仅有光线的变化,而且有树枝抖动,路面反光等影响因素,不难发现,在更新的背景中,传统GMM 更新的背景出现了很多模糊区域,在运动密集区域尤为显著,而且其前景图也有大量的噪声,改进型GMM 则明显优于传统GMM。
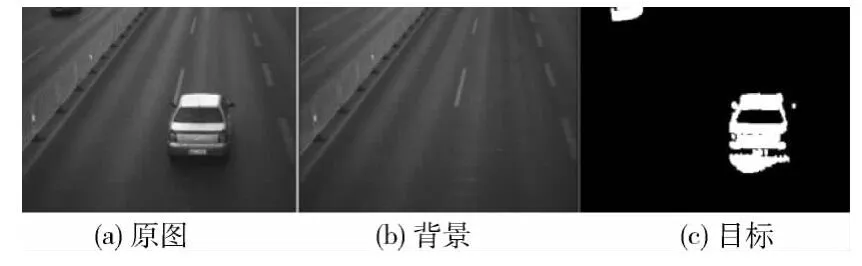
图2 场景1传统混合高斯模型
图3 场景1改进型混合高斯模型

图4 场景2传统混合高斯模型

图5 场景2改进型混合高斯模型
4 结束语
本文在传统的混合高斯背景建模基础上,针对传统混合高斯建模方法不足进行了改进。通过实验发现,改进后GMM 方法,在复杂场景中检测运动目标时,有效抑制了匹配不准确产生的误检测像素(噪声),通过匹配数更新模型参数,更新速度显著提高,满足一般视频序列的实时性要求。
本文提出检测方法在检测目标时,由于部分前景像素的像素值接近背景像素的像素值,因此前景部分出现了断裂和缺失,影响运动物体的形状判断,该问题在未来的研究中有待解决。
[1]ZHANG Xiaona,HE Ren.Moving vehicle detection method based on Gaussian mixture model of spatial information [J].Journal of Jiangsu University,2011,32 (4):385-388 (in Chinese).[张晓娜,何仁.基于空间信息高斯混合模型的运动车辆检测 [J].江苏大学学报,2011,32 (4):385-388.]
[2]LI Nai’an,OUYANG Ning.Design and implement real-time object detection and tracking system [J].Laser &Infrared,2008,38 (1):88-91 (in Chinese).[李乃安,欧阳宁.实时目标检测与跟踪系统的设计与实现 [J].激光红外,2008,38(1):88-91.]
[3]Wang Yang.Real-time moving vehicle detection with cast shadow removal in video based on conditional random field [J].IEEE Transactions on Circuits and Systems for Video Technology,2009,19 (3):437-441.
[4]ZHANG Chao,WU Xiaopei.A mving object detection algorithm based on improved GMM and short-term stability measure[J].Journal of Electronics &Information Technology,2012,34 (10):1402-1406 (in Chinese).[张超,吴小培.基于改进型高斯混合建模和短时稳定度的运动目标检测算法 [J].电子信息学报,2012,34 (10):1402-1406.]
[5]Quast K,Kaup A.Real-time moving object detection in video sequences using spatio-temporal adaptive Gaussian mixture models[C]//Angers,France:Proceedings of the International Conference on Computer Vision Theory and Applications,2010:413-418.
[6]Fakharian A,Hosseini S,Gustafsson T.Hybrid object detection using improved Gaussian mixture model[C]//Korea:International Conference on Control,Automation and Systems,2011:1475-1479.
[7]Hu Weiming,Tan Tieniu,Wang Liang,et al.A survey on visual surveillance of object motion and behaviors [J].IEEE Transactions on Systems, Man and Cybernetics,Part C,2004,34 (3):334-352.
[8]Martel-Brisson N,Zaccarn A.Moving cast shadow detection from a Gaussian mixture shadow model[C]//IEEE Computer Society Conference,2005.
[9]Power PW,Schoonees JA.Understanding background mixture models for foreground segmentation [C]//Auckland,New Zealand:Proceedings of Image and Vison Computing,2002:267-271.
[10]Wang H,Suter D.A re-evaluation of mixture-of-Gaussian background modeling [C]//Pennsylvania,USA:IEEE International Conference on Acoustics,Speech,and Signal Processing,2005:1017-1020.
[11]Rafael C Gonzalez.Digital image processing [M].Beijing:Publishing House of Eletronics Industry,2007:8.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
数字通信世界(2021年3期)2021-04-09
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
湖北理工学院学报(2020年4期)2020-08-22
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
中国水运(2017年9期)2017-09-15
计算机应用与软件(2017年4期)2017-04-24
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01
