
氦透平膨胀机制动风机机理分析与控制方案
2014-12-22 03:43周芷伟
低温工程 2014年6期
胡 剑 付 豹 庄 明 周芷伟
(中国科学院等离子体物理所 合肥 230031)
1 引言
随着大科学工程的发展,越来越多的科学试验,需要在低温环境下进行,因此需要大型氦制冷机来创造低温环境。透平膨胀机,作为大型氦制冷机的核心部件,承担着氦制冷机降温的重任。透平能否安全可靠的运行决定着氦制冷机能否稳定运行。目前,国外氦透平膨胀机做的较好的有Linde、法液空和ATEKO等公司,国内主要有西安交通大学、杭氧科技、中国科学院理化技术研究所和中国科学院等离子体物理研究所等[1]。
氦制冷机将氦气从常温制冷到几开,因此透平经历的工况较复杂,对透平转速的控制要准确及时,就需要制动器来控制。制动器的作用有两个:(1)维持透平所需的转速;(2)接受透平膨胀端的功率,输出相应的机械功[2]。氦透平膨胀机的制动器主要有两种形式,电磁制动型和流体动力制动型,本文主要分析流体动力制动型中的风机制动。
2 透平风机制动机理分析
透平制动器的风机,往往不考虑风机的效率,主要考虑结构简化和提高机械强度方面,因此,多数采用进出口角都是90°的叶片。风机制动适用于高速转动,在透平中直接通过转子传动,调节灵敏,工作原理正好与膨胀端相反。通常制动风机的通流部分由进口收缩管、风机轮、扩压器、蜗壳等部分组成,其结构图如图1所示。
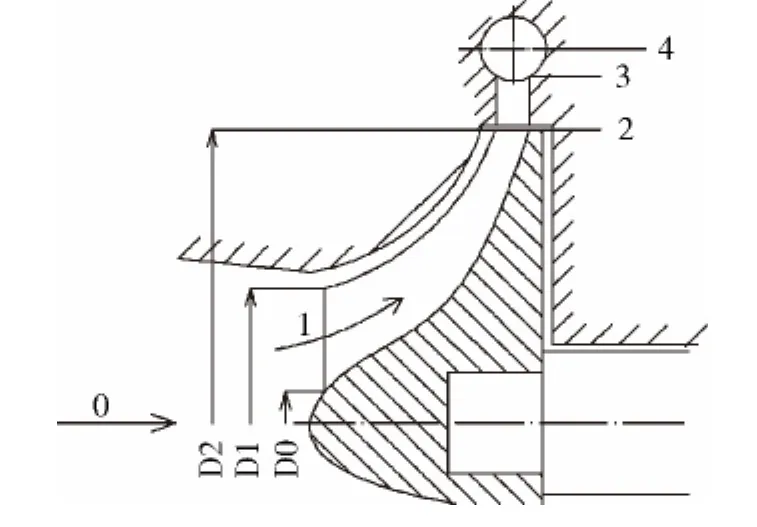
图1 制动风机结构图Fig.1 Structure diagram of braking fun
制动气体由进口状态0进入,进入收缩管后达到状态1,此过程中,速度有所提高,压力有所降低,收缩管使得进入叶轮的气体流动均匀。气体由状态1进入风机叶轮,叶轮对气体做功,使得压力、速度和温度都明显的升高,以状态2排出叶轮。接着气体进入扩压器中减速增压,到达状态3,再进入蜗壳中进一步扩压减速,最后由状态4排出[1]。这个过程中,重点是1-2过程,直接对此过程进行分析。
1-2过程:风机叶轮中由于机械功的加入,将气流速度提高,引入欧拉公式的假设:
(1)假设流体通过叶轮的流动式恒定的,且看成是无数层垂直于转动轴线的流面总和,在层与层的流面之间其流动互补干扰;
(2)假设叶轮具有无限多的叶片,叶片厚度无限薄。因此流体在叶片间流道作相对流动时,其流线与叶片形状一致,且当流体进、出叶片流道时,流体之间无冲击;
(3)假设流体是理想流体,且不考虑能量损失[2]。
当叶轮旋转时,在叶片进口1处,流体一方面随叶轮旋转作圆周牵连运动,其圆周速度为u1;另一方面又沿叶片方向作相对流动,其相对速度为w1。因此,流体在进口处的绝对速度C1应为u1与w1两者之矢量和。同理,在叶片出口2处,流体的圆周速度u2与相对速度w2之矢量和为绝对速度C2,如图2所示。因为制动风机一般采用90°的工作角,所以w1与u1,w2和u2分别垂直。
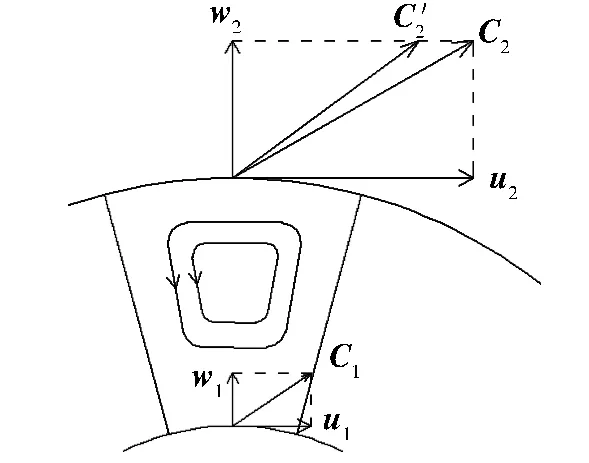
图2 叶轮中气体速度矢量图Fig.2 Gas speed vector diagram in impeller
流体的圆周速度u2为:

式中:ω为风机转速,rad/s;r2为叶轮边缘半径;d2为叶轮直径;n为风机转速,r/min。
根据假设,在叶轮进出口边缘流体均匀一致,叶轮没有径向的功,因此可认为w2=w1。由于假设是理想流体,而且无能量损失,气体是轴向进气,且叶轮工作角是90°,故只有径向速度,无切向速度,即u1=0,w1=C1。实际中C1比C0要大点,一般可取90¯140 m/s。
当流体进入叶轮后,忽略了能量损失,叶轮对流体做的功全部被流体获得,利用动量矩定理可以导出这种能量关系。动量矩定理:质点系对某一转轴的动量矩对时间的变化率,等于作用于该质点系的外力对该轴的力矩M,对轴心列出角动量方程,即:

由于u1=0,故:

风机转轴的功率N:

所以:

实际情况下,叶片数目只有几片或几十片,在有限数目叶片的流道中,还存在因流体惯性而产生的轴向相对涡流运动,由于通道内的环流造成了相对速度的偏斜,因而使绝对速度在反旋转方向产生了滑移,使得实际的u2偏小,(如图2中C’2),并且流体也不是理想流体,存在着能量损失。方程中实际与理想速度的关系,至今还只能以经验公式来表明,而这些经验公式的适用范围也是有限的,引入系数来修正,即:

对于径向叶片的航空式叶轮,这一滑动系数ν可选用下述半经验公式表示[1]:

式中:ZrF为风机叶轮的叶片数;D1m为风机叶轮进口的平均直径为风机叶轮的轮径比,μF=;k为风机叶轮的轮毂比,k=rFrF
对于制动风机,一般可取 μF=0.45¯0.65,krF=0.15¯0.3,ZrF=8¯12 片。
在风机中,还存在轮盘摩擦损失,主要包括在轮盘背面的摩擦鼓风损失和轮叶顶缘与机壳间的内泄露损失,用ξF表示,因此可得轮盘摩擦损失的功率:

对于半开式叶轮,ξF=0.05¯0.15,对于开式叶轮,ξF=0.15¯0.25。
本文基于功率谱反演方法得到各向异性大气湍流相位屏,模拟了贝塞尔高斯涡旋光束在其中的光强分布、光强闪烁和光束抖动的影响,并与已有在轴闪烁的理论值进行比较.研究了不同参数下强度分布、闪烁效应和抖动效应的变化规律.
因此,流体风机的实际制动功率:

风机叶轮出口绝对速度:

由以上分析可知,制动风机的功率与流体的质量流量˙m、转速n有关。而质量流量又与制动循环的压力、进出口压差、压比、管网的阻力特性等有关,即间接与制动功率有关。若维持转速不变,随着风机气量的减少,制动端的制动功率也相应的减小。当气量太小时,风机进入不稳定状态,并使排除压力产生脉动,引起振动,形成了所谓的喘振现象[3]。严重时,会造成机械损坏,轴承过载,管道振动等事故。特别在采用气体轴承时,喘振产生附加的干扰力,破坏转子-轴承的动平衡。
3 喘振的防护
防喘振常用的控制方案有2种:固定极限流量(或称最小流量)法与可变极限流量法[5]。
固定极限法:从图3上看,透平最高转速下的临界流量为Q1,如果能保证在任何转速下,入口流量控制在大于Q2(Q2=Q1+S,S为安全裕度,可根据需要设定),透平就会工作在安全区。
可变极限法:根据透平的性能曲线及公式,经简化,可以得到与喘振线平行的控制线,在不同的转速下,使透平运行在相同的安全裕度下,不造成浪费。

图3 制动风机的特性曲线Fig.3 Characteristic curve of braking fun
4 制动风机的控制方案
氦制冷机中,为保证氦气的纯度,制动回路必须采用封闭的氦气回路,这要求制动风机的特性和管网特性相匹配。即在一定转速下透平膨胀机发出的功率必须与风机吸收的功率平衡,而风机排出的气量和压力必须与管网阻力特性相平衡。
在透平膨胀机中,转速由膨胀端确定,因此只能通过控制流体的质量流量来调节制动风机的功率,以消耗膨胀端传递来的功率。根据制动风机的特性曲线与管路特性曲线的匹配特性,对流量的调节有两种方法:(1)通过调节管路上的调节阀,来改变管路的阻力,进而来改变质量流量,也改变体积流量;(2)改变制动回路气体的压力,即改变气体的密度,以此来调节质量流量。
4.1 单阀调节
通过调节阀来调节质量流量,在制动回路中加入一个调节阀,改变阀的开度来改变流量。原理如图4所示。在图4中,横轴表示体积流量,纵轴下面H表示风机的压头曲线,上面P表示的是风机的功率曲线。当风机的转速一定时,风机的压头与管网的特性阻力相平衡,系统处于稳定的工作状态,即图中的A点,对应的风机功率为B点。若因工况的变化,风机功率增加,使转速增加了20%,在管网阻力不变时,风机的压头变化到图4a中n=120%的曲线。根据压头与管网阻力的匹配特性,平衡点将变化到C点,风机对应的功率变化到D点。为了使转速稳定在原来值,又需消耗同样的功率,在原转速下,同样的功率点位于E点,对应着n=100%转速下压头线上的F点[1]。很明显,此时的管网阻力减小(例如图中的R=60%线),并且流量增大了,这个就是风机制动的调节原理。在制动压力足够大的条件下,即制动功率足够匹配膨胀端的制冷功率并过剩时,简单常用的方法是调节制动回路上的制动阀的开度,当转速过高时,增大阀的开度,转速降低时,减小阀的开度。
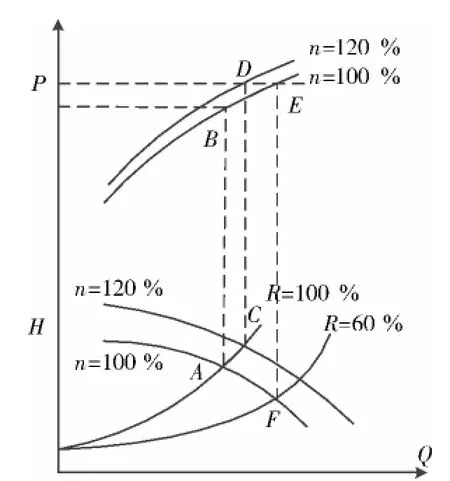
图4 单阀控制的风机与管网特性匹配图Fig.4 Matching diagram of fan and network character for single valve control
在制动回路中加一个调节阀即可实现对流量的调节,此种方法较简单,通过PID控制器直接作用控制阀的开度即可。PID控制器为正作用,即比例系数为负值,其管道仪表流程图如图5所示。
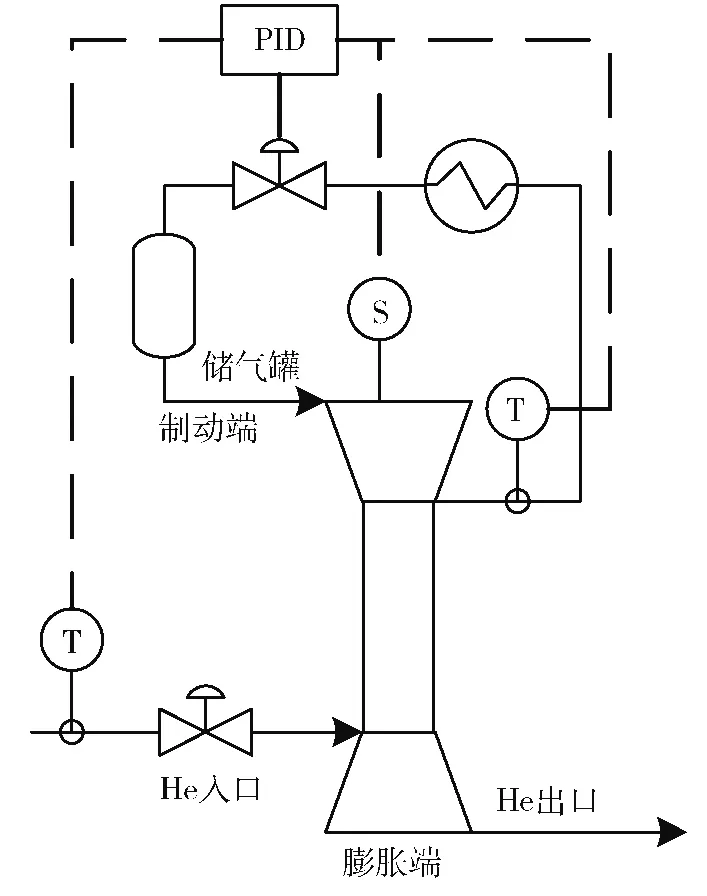
图5 单阀控制流程图Fig.5 Piping and instrumentation diagram of single valve control
为防止发生喘振,应设置最小的开度,若制动阀已经在最小开度下,如需增加透平的转速,则应增大透平入口阀开的开度;若制动阀已达最大开度,如需降低透平转速,为保证透平安全运行,则应减小(透平膨胀机的)入口阀开度,一般情况下,为满足制冷机的制冷量,透平的入口不能随意调节。
4.2 双阀调节
通过改变制动气体的压力来改变密度,从而改变质量流量。这种方法不会改变管路的阻力特性。
当风机的转速在一定范围内变化时,有如式(11)所示关系:

式中:Q为气体的体积流量;H为风机的压头;N为风机的轴功率;n为风机的转速。
当转速不变时,排气压力保持不变,体积流量也不改变。
如图6所示,横轴表示体积流量Q,纵轴下面H表示风机的压头曲线,上面P表示的是风机的功率曲线。设制动风机工作于稳定的状态A点,对应的风机功率为B点。若因工况的变化,风机功率增加,使转速增加了10%,若管网阻力不变,风机的压头变化到图4b中n=110%的曲线。此时平衡点将变化到C点,风机对应的功率变化到D点。为了使转速稳定在原来值,又需消耗同样的功率,维持体积流量不变的情况下,增加压力,质量流量增加,使转速降低到A点,此时消耗的功率对应在E点。

图6 双阀控制的风机与管网特性匹配图Fig.6 Matching diagram of fan and network character for double valve control
这里,近似的可认为压力与密度成正比的关系。有˙m=ρQ,则:

式中:LE、LB分别是 E、B 点对应的功率;ρE、ρB分别是E、B点对应的密度;PE、PB分别是E、B点对应的压力。
这种方法需要两个调节阀,一个连接在高压路与制动回路入口之间,另一个连接在制动回路的制动风机出口与低压路之间。当制动回路需要增压时,先关低压路调节阀,若低压路调节阀门全关,制动还不足,则需开高压路调节阀;当制动回路需要泄压时,先关高压调节阀门,若高压调节阀门全关,制动还过剩,则开低压路调节阀。在控制上,可用一个PID控制器来控制两个阀,采用分程的控制方法,PID控制器也为正作用,即比例系数为负值,其管道仪表流程图如图7所示。
两个阀分程的方式如图8所示,图中1为低压调节阀开度线,2为高压调节阀开度线。两个开度线中间的死区是为了防止两个阀在此位置频繁的波动。
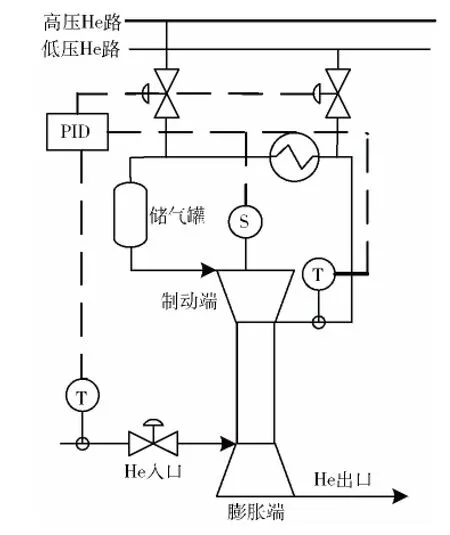
图7 双阀控制流程图Fig.7 Piping and instrumentation diagram of double valves control
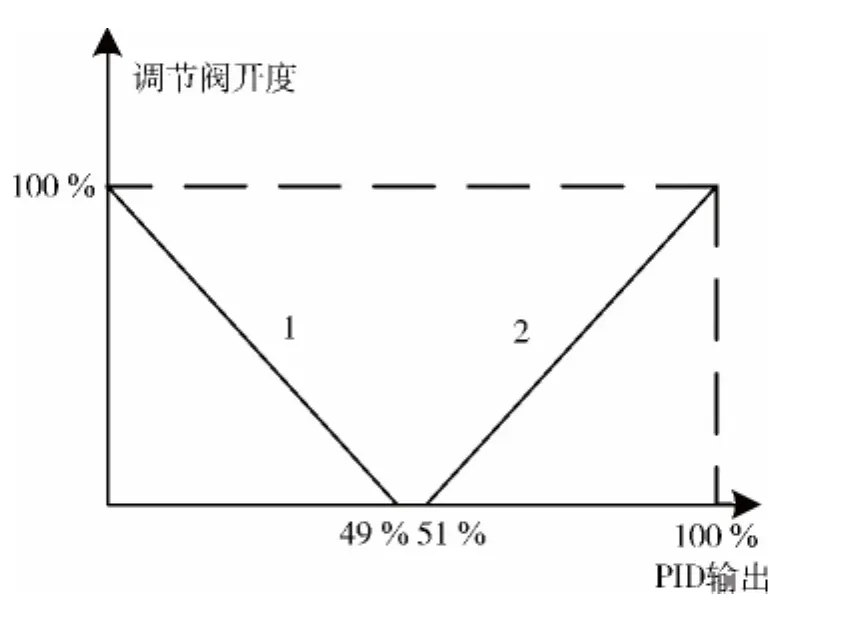
图8 分程控制阀开度分配图Fig.8 Opening valve distribution diagram of split-ranging control
为防止透平发生喘振,低压调节阀也应设置最大开度,保证透平安全运行。若低压调节阀已经在最大开度下,如需增加透平的转速,则应增大透平入口阀开的开度;若高压调节阀已达最大开度,如需降低透平转速,则应减小入口阀开度。
正常情况下可认为制动回路在一个稳定工况下运行,回路中各部分温度偏差不大,因此可以忽略氦气粘度对功率、流量、排气压力的影响。
4.3 制动阀的控制器设定
PID控制器是基于偏差进行控制的,具有较强的灵活性和适应性,设计简单,参数方便调节。目前的工业控制中大多数采用PID控制器。在氦透平膨胀机的控制器中,也有采用模糊PID控制器的。常用PI控制器,微分作用D适用于大滞后而需要迅速做出响应的控制过程。氦透平膨胀机比较精密,调节不能有大波动,因此对入口阀和制动阀都需缓慢调节。根据以上分析,PID控制器也为正作用,即比例系数P为负值,且不宜过大,否则会引起较大的超调量,积分时间I不宜过大,微分时间D应当取小点,甚至可以取0。对于控制器的转速设定值,不能变化过快,因此需对转速的设定值进行预处理,使得即便转速计算值跳动很大,也会使得透平转速缓慢变化,同时也能实现人工与自动操作的无扰动切换,实际中还需考虑实际转速的影响。控制流程图示例如图9所示。
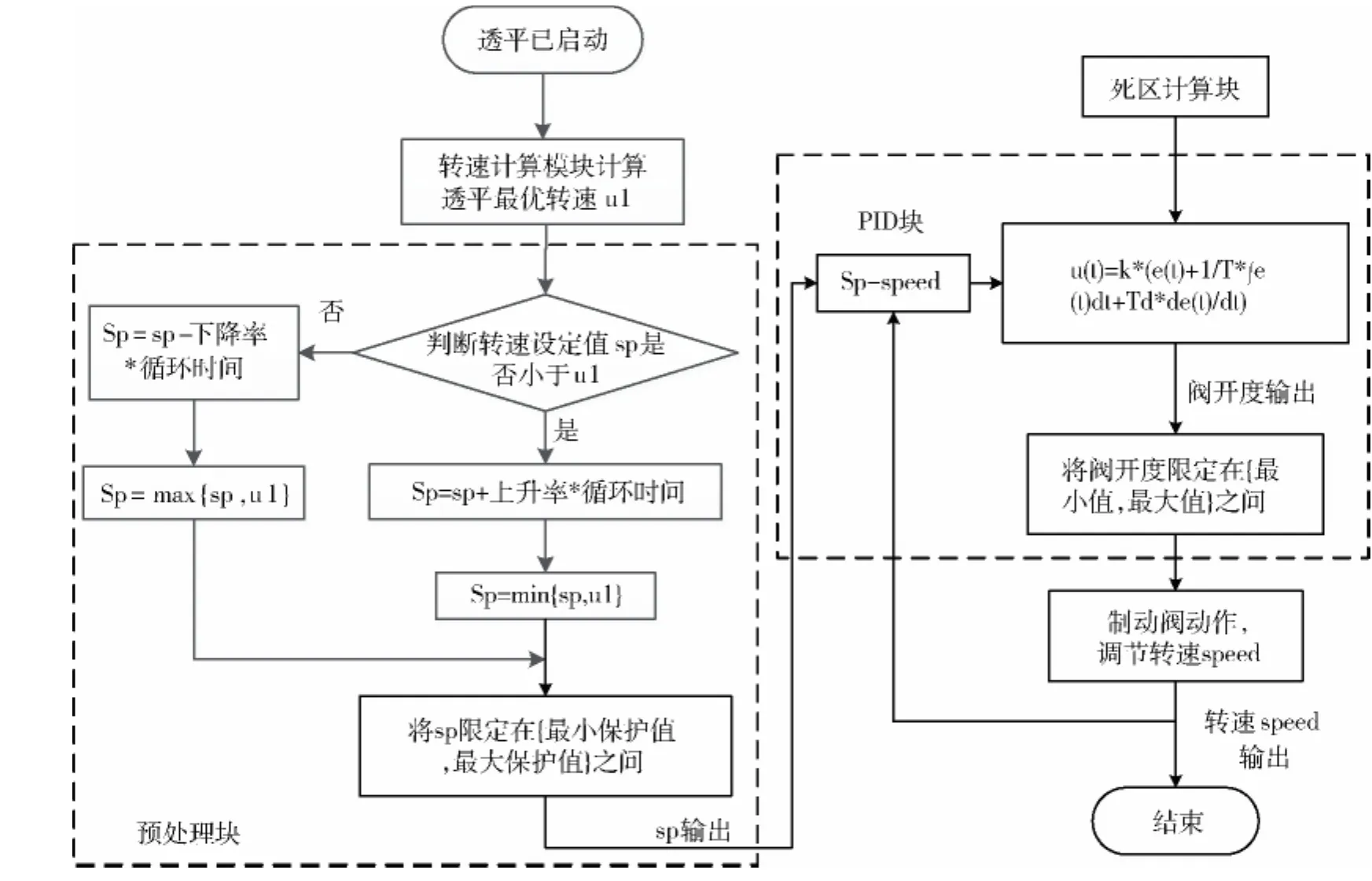
图9 制动阀的控制流程图Fig.9 Control flow diagram of brake valve
4.4 入口阀调节
实际的控制系统中,不能单独依靠制动回路来控制透平的转速,还需配合入口阀的调节。因为入口阀的开度影响制冷机的制冷量,所以对氦透平膨胀机转速的控制,以制动端控制为主,入口控制为辅。在对入口阀开度进行调节之前,需进行两个状态判断,1状态:制动阀是否在高制动状态下;2状态:透平转速是否过高。
1状态的判断:在单阀与双阀调节中,略有不同。对于单阀门调节,当制动阀开度超过一定值(比如说95%)时,判定为高制动状态。对于双阀调节,当制动回路的制动压力高于一定值(例如1MPa)时,判定为高制动状态。高制动状态表示制动器的制动力不足,也就是接近制动功率的上限。
2状态的判断:这里的转速过高并不是指透平的转速超过报警转速或保护转速,而是指透平的实际转速高于转速设定值sp的一定范围(比如说超过sp的20%),判定为透平转速过高。以一个流程图示例来说明,如图10所示。
5 小结
先从氦透平膨胀机制动端的机理开始着手,得出制动功率、转速和流量的关系,为控制方案的制定提供依据。在实际中若遇到问题,也可通过机理分析查找原因以及对制动方案的优化。控制方案,应以模块化的思想编写,实际控制过程中涉及的参数较多,并不是简简单单的如流程图这般简易,还需考虑安全保护等措施,这也体现了氦透平膨胀剂机控制系统的复杂性和难度性。
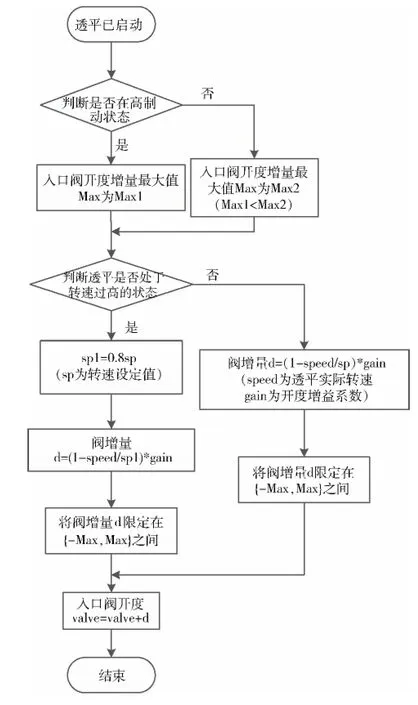
图10 入口阀的控制流程图Fig.10 Control flow diagram of inlet valve
1 常旭宁,孙俊芳,乔佳,等.氦透平膨胀机在我国的发展[J].低温与超导,2014,42(2):30-34.Chang Xuning,Sun Junfang,Qiao Jia,et al.The development of helium turbo expander in China[J].Cryogenics and Superconductivity,2014,42(2):30-34.
2 计光华.透平膨胀机[M].北京:机械工业出版社,1989.Ji Guanghua.Turbine Expansion Machine[[M].Beijing:China Machine Press,1989.
3 伍悦滨,朱蒙生.工程流体力学泵与风机[M].北京:化学工业出版社,2005.Wu Yuebin,Zhu Mengsheng.Engineering fluid mechanics pump and fan[M].Beijing:Chemical Industry Press,2005.
4 潘国修.增压透平膨胀机防喘振控制设计与应用[J].杭氧科技,2009(2):11-15.Pan Guoxiu.The design and application of anti-surge control for supercharged turbo expander[J].Science&Technology in Hangyang,2009(2):11-15.
5 李江平.相似原理在压缩机防喘振控制中的应用[J].大氮肥,1997,20(5):294-296.Li Jiangping.The similarity principle in the application of the compressor anti-surge control[J].Large Scale Nitrogenous Fertilizer Industry,1997,20(5):294-296.
猜你喜欢
仪器仪表用户(2022年10期)2022-09-29
仪器仪表用户(2022年9期)2022-08-30
仪器仪表用户(2022年4期)2022-04-01
水泵技术(2021年3期)2021-08-14
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
电站辅机(2021年4期)2021-03-29
发电技术(2020年3期)2020-06-29
石油化工自动化(2018年5期)2018-11-14
制造技术与机床(2017年6期)2018-01-19
