
桶式基础结构负压下沉自动控制系统
2014-12-18 11:19:36舒方法杨安韬杨三元
中国港湾建设 2014年10期
舒方法,杨安韬,杨三元
(中交上海三航科学研究院有限公司,上海 200032)
1 项目背景
桶式基础结构防波堤是一种防波堤结构。桶形结构为上端封闭、下端开口、中间空腔的混凝土结构[1],通过对桶体内部充压缩空气来实现气浮拖运。沉贯就位时,先靠自身重量及平台上部结构重量使其筒裙底端插入海底一定深度[2],桶内形成封闭空间,然后用泵抽吸,形成负压,依靠桶顶内外表面压差,克服桶体下沉阻力,使桶体下沉到预定深度,从而达到施工要求[3]。
桶式基础结构内部分9个仓,每个仓上有进排气孔和排水口,如图1所示。通过电磁阀和抽水泵控制每个仓的进排气状态或者抽水状态来控制桶式基础结构的平衡。在整个的工艺流程中,桶式基础结构的倾斜度和下沉的标高是控制系统的主要控制目标,也是衡量工程质量的一个重要参数。

图1 桶式基础结构Fig.1 The bucket foundation structure
2 控制系统设计与开发
2.1 控制系统需求分析
在桶式结构充气浮运阶段,通过桶体上的进气管路向桶体内部充入压缩空气,使结构漂浮于水面,调整桶体内的充气量,使桶体的入水深度达到满足拖航稳定性的要求。故控制系统首先要有桶式结构姿态监控功能,其次要有快速响应处理功能,可以根据监测的姿态数据,快速计算并反馈控制执行机构进行充放气调节,保证桶式结构的姿态稳定性。
2.2 控制工艺
根据施工工艺,桶式基础结构的安装分以下4个步骤:气浮上升、气浮拖运、自重下沉、负压下沉。
1)气浮上升:压缩空气通过进气管往舱内充气,桶式基础结构在大气压力和浮力的作用下缓缓上浮,直至达到浮运稳定状态,在上浮过程中PLC自动控制桶式基础结构的姿态,使之平衡、稳定上升至目标高度。
2)气浮拖运:当桶体达到浮运稳定状态后,由拖轮拖动桶式基础结构到达目的位置,在拖运过程中,由PLC自动控制进气阀的打开和关闭来调整桶式基础结构的姿态,使其保持平衡,并维持在浮运稳定允许的高度。
3)自重下沉:当桶体到达目的位置后,PLC关闭进气阀门,打开排气阀门,桶式基础结构在自身重力和浮力的作用下下沉入泥,PLC通过控制排气阀的打开和关闭来控制下沉的速度和桶式基础结构的平衡。
4)负压下沉:当桶式基础结构自重下沉结束后,PLC关闭排气阀门,打开抽水泵抽水,桶体在大气压力的作用下继续下沉,PLC通过控制抽水泵的打开和关闭来控制下沉的速度和桶式基础结构的平衡,当到达设计标高时,关闭排水泵,负压下沉结束。
2.3 控制系统设计
2.3.1 系统原理
桶式基础结构充气浮运及负压下沉自动控制系统框图如图2所示,由4台GPS通过RS232端口输出经、纬度信号,分别连接到PLC控制系统和计算机,PLC系统根据GPS输出的Z方向信号来判断构件变化情况,为姿态控制提供依据。同时计算机读取GPS信号并通过坐标转换软件,计算出构件在工程坐标系下的坐标,在计算机上进行显示。另配备有倾斜仪直接连到PLC控制系统的模拟模块,通过PLC的CPU对其进行循环扫描进行姿态控制,故该套控制系统采用冗余控制策略,用两套控制纠偏系统根据预先设定的控制优先策略进行姿态和下沉控制,保证了控制系统的可靠性和稳定性。
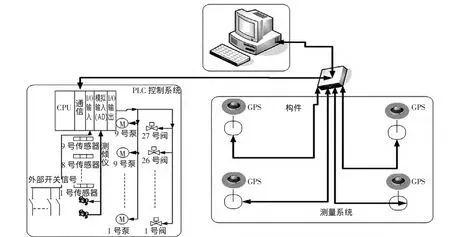
图2 桶式基础结构充气浮运及负压下沉自动控制系统框图Fig.2 Diagram of the pneumatically floated bucket foundation structure and theautomatic control system with negative pressure sinking
2.3.2 设备选型
1) 姿态采集系统:采用4台Trimble SPS852 GPS和1台德国FRABA/POSITAGL公司的精密双轴倾角传感器ACS-080组成。GPS-RTK实时提供桶式结构的三维坐标,GPS系统在Z轴方向精度可以到达5 cm,水平精度3 cm。精密双轴倾角传感器实时提供桶式结构的倾斜姿态,倾角仪精度为 0.01°。
2)压力采集系统:检测舱内压力的变化,并设计专用数据库进行存储,作为姿态影响因素之一进行研究;该压力传感器为真空压力模拟量传感器,压力测量量程为-0.1~1 MPa,测量精度为0.1%FS,可以满足负压测量和精度要求。
3) 可编程序控制器 (PLC) 采用SIEMENS公司的S7-200系列,CPU本身自带RS485通讯端口,可以和现场设备进行自由口通讯,CPU通过RS485通讯端口采集GPS的高程数据,通过数字量输入模块采集现场的数字信号,通过模拟量输入模块采集现场的模拟信号,再结合上位机的操作指令,判断桶式结构的倾斜姿态,再根据不同的工艺流程,控制9个舱的进排气阀和排水泵的打开和关闭,通过调节9个舱内部的气压或者排污泵产生的负压来调节桶式结构的姿态,以达到自动纠偏的目的。
2.3.3 姿态控制及报警系统
下沉姿态控制系统采用的冗余控制策略,分别采用GPS的高程数据和倾斜仪的角度数据来综合判断桶体的姿态,并在软件中设置自动纠偏的控制精度,设定三级倾斜情况,第一级倾斜时,程序自动纠偏,报警灯发出黄光并闪烁;第二级倾斜时,程序自动纠偏,上位机弹出报警信息,报警灯发出红光并闪烁,同时报警铃声响起提醒施工人员注意;第三级倾斜情况可能出现在设备出现故障或者桶体下沉时遇到钙化物导致倾斜情况无法调整,这样就需要停机检查,排除设备故障,并切换到“手动”模式,通过一边充气一边排水的方式进行调平,当桶体调平以后可切换到“自动”模式继续施工。
2.3.4 上位机开发
上位机操作软件采用模块化设计方法,在LABVIEW 2009环境下进行开发,界面简洁操作方便,施工人员可以在PC机上观察到桶式基础结构的位置和高程、桶式基础结构的倾斜姿态、现场电磁阀和抽水泵的开闭状态和舱内大气压力等信息,而且所有传感器信息、操作信息全部录入数据库,可以随时查看以前的记录。本系统具有自动和手动两种控制方式,施工人员可以通过操作台上的按钮进行手动和自动控制模式的切换,在界面上也可以观察到目前是何种控制模式。在自动纠偏的过程中,施工人员可以通过上位机界面实时观察桶式基础结构的状态。上位机操作软件界面如图3所示。
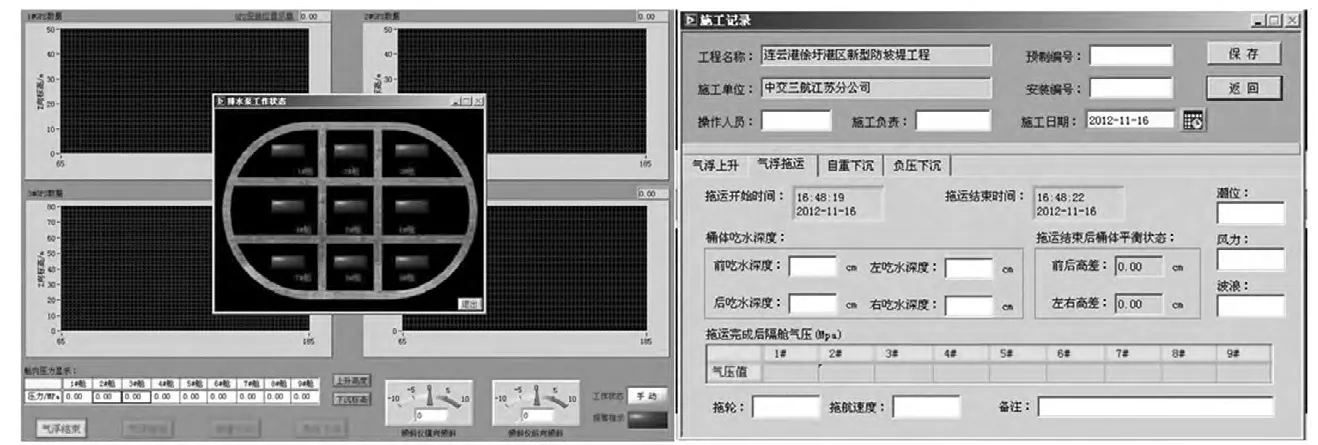
图3 系统操作界面Fig.3 System operation interfaces
3 结语
本控制系统针对该结构的性能特点、研究建立了桶式结构自动控制系统,在徐圩防波堤工程中实现桶式结构自半潜驳上气浮上升、气浮拖运至安装位置和负压下沉至设计标高全过程自动控制,且在整个施工过程中,自动获取桶式结构的姿态信息并自动纠偏,保证桶式结构的浮运平衡和平稳下沉。
[1] 高志伟,李亚,高树飞,等.徐圩防波堤工程桶式基础结构设计[J].水运工程,2013(10):89-94.GAOZhi-wei,LIYa,GAOShu-fei,et al.Bucket foundation structure design of Xuwei breakwater[J].Port&Waterway Engineering,2013(10):89-94.
[2] 徐光,谢善文,李元音.防波堤的新结构型式[J].水运工程,2001(11):20-25.XU Guang,XIE Shan-wen,LI Yuan-yin.New structure types of breakwaters[J].Port&Waterway Engineering,2001(11):20-25.
[3] 袁德奎,陶建华.半圆型防波堤波浪力的计算方法[J].中国港湾建设,2002(2):11-15.YUAN De-kui,TAO Jian-hua.Calculation of wave forces on semi-circular breakwater[J].China Harbour Engineering,2002(2):11-15.
猜你喜欢
山东农机化(2023年6期)2024-01-10 06:48:16
环球时报(2022-04-28)2022-04-28 17:19:11
军事文摘·科学少年(2021年6期)2021-06-24 05:42:11
江苏安全生产(2020年6期)2020-07-28 07:48:26
海洋通报(2020年6期)2020-03-19 02:10:34
建材发展导向(2019年10期)2019-08-24 06:24:52
中国港湾建设(2017年11期)2017-12-19 12:27:11
科学与财富(2017年24期)2017-09-06 05:02:47
科技与创新(2016年2期)2016-01-19 11:23:29
橡胶工业(2015年3期)2015-07-29 08:24:14
