
小波能量熵在疲劳驾驶检测中的应用
2014-12-14 06:03:24岳李圣飒吴志周
交通信息与安全 2014年5期
岳李圣飒 吴志周 孙 阳
(同济大学交通运输工程学院 上海 200092)
0 引言
疲劳驾驶是导致交通事故的主要原因之一。美国交通部1项专门针对商用车辆的研究报告指出,20%~40%的商用车辆事故是由于驾驶人疲劳驾驶造成的[1]。目前各国普遍采取对驾驶人连续驾驶时间进行限制的方法来减少疲劳驾驶,例如,中国规定机动车连续驾驶时间不得超过4 h[2]。然而这种方法没有考虑不同驾驶人在身体素质、生活习惯,以及同一驾驶人在不同时期的身体状况等多方面的差异,简单以连续驾驶时间的长短判定疲劳与否具有一定争议。
疲劳不是1个突发事件,多数的道路交通安全事故并非都是在驾驶人已经深度疲劳时发生。如果能在驾驶人刚刚出现疲倦迹象时给予警示,将有利于减少疲劳驾驶带来的事故。因此研究疲劳驾驶实时检测方法,对改善交通安全状况具有重要意义。
目前对疲劳驾驶的实时检测方法以检测驾驶人生理信号(EEG[3-4]和ECG[5-6])和面部信号(如眼动[7-9]、头动[10-11])为主。但检测生理信号,需要驾驶人佩戴相关设备,这样易干扰正常驾驶;而检测面部信号,需利用摄像设备对驾驶人头部参数进行识别,易受环境因素影响。国内外有学者提出车辆转向情况能很好反应驾驶人精神状态,A.Eskandarian[12]认为清醒状态下转向盘多呈现小幅度修正,而疲劳状态下转向盘大幅度修正显著增加。张希波等人[13]的研究显示,可以利用转向盘的最大零速百分比和最大角度标准差作为疲劳驾驶判别指标。由于转向盘转向易受道路线形影响,以往研究中常用对连续一定时长(或一定转向角度)以上的同方向转向减去该段时间内转向角度均值来估计该段时间内的真实转向操作,然而这种处理方法是基于假设该段操作时间内道路曲率半径不变,这与现实情况相差甚远,从而降低了利用转向盘转向作为疲劳驾驶检测指标的有效性。
由于熵可以用来衡量体系的混乱程度,用转向熵描述一段驾驶过程中转向操作的不平稳性,并不涉及具体的转向角度,因此理论上当采样间隔合适时转向熵的分布比具体的转向幅值受道路线形的影响更小。又由于小波变换具有时频局部化特性,有利于捕捉转向盘转向信号中的非平稳特征,故本文的目的在于寻找1种能够表征驾驶疲劳程度的转向盘转向小波熵形式,为提高基于车辆转向特征的疲劳驾驶检测方法有效性提供帮助。
1 驾驶仿真实验
1.1 平台搭建
驾驶仿真平台由桌面控制系统与软件开发系统构成。桌面控制系统由力回馈转向盘及油门、档位、刹车踏板等部件构成,软件开发系统包括3DMAX 道路场景建模及VIRTOOLS虚拟驾驶数据采集脚本编写2部分。
1.1.1 3DMAX 道路场景建模
由于驾驶疲劳容易产生在高速、长时间、单调环境的驾驶过程中,因此疲劳驾驶仿真实验选择高速公路作为实验开展的场景。参考《公路路线设计规范》(JTGD20—2006),基本场景设计为:①双向6车道环形高速公路场景;②车道宽3.75 m,硬路肩宽3 m,全长22km;③设计车速100 km/h;④道路线形包括基本形、卵形、S形等道路基本线形;⑤少量背景车辆建模以模拟现实交通流。
1.1.2 VIRTOOLS虚拟驾驶数据采集脚本开发
VIRTOOLS可以制作出沉浸感较好的虚拟环境,为驾驶者提供诸如视觉、听觉、等感官信息,给参与者1种身临其境的感觉。本实验中VIRTOOLS脚本程序用于记录虚拟驾驶场景中转向盘转向修正数据。
驾驶道路场景仿真及数据记录脚本开发示意图见图1。
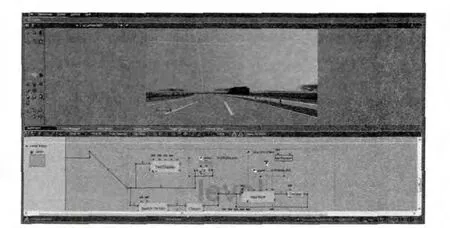
图1 驾驶道路场景仿真及数据记录脚本开发示意图Fig.1 Driving simulation scenarios and VIRTOOLS scripts
1.2 疲劳状态评价
实验中通过驾驶状态自评和他评2部分确定驾驶人的疲劳程度。疲劳程度自评和他评等级特征及划分见表1。自评等级划分根据Karolinska嗜睡量表进行设定,将驾驶人的精神状态从格外清醒到极度疲劳划分成10 个等级[14];他评则通过实验工作人员在实验过程中对驾驶人的驾驶状态进行主观评定进行,根据驾驶人面部特征将驾驶疲劳程度分成3 个等级[13]。自评等级划分较细,可用于分析驾驶人整个实验过程中疲劳程度的详细发展情况,疲劳程度是否一直在加深,或者在某一时间段内疲劳程度有所缓解,出现了逆向发展。自评结果可用于选择合适的分析数据段。他评等级划分跨度较大,可用于从疲劳发展整体趋势上判定驾驶人自评结果是否准确。此外对于真实环境下的驾驶疲劳检测,表1状态自评中过细的疲劳程度划分将导致检测精度的下降,也缺乏现实必要性。更为有效的疲劳程度划分是依据表1中他评等级进行设定,即将驾驶疲劳程度分为3级:清醒、疲劳、深度疲劳。笔者采用疲劳程度3级划分方式对各疲劳发展阶段转向特征进行研究。
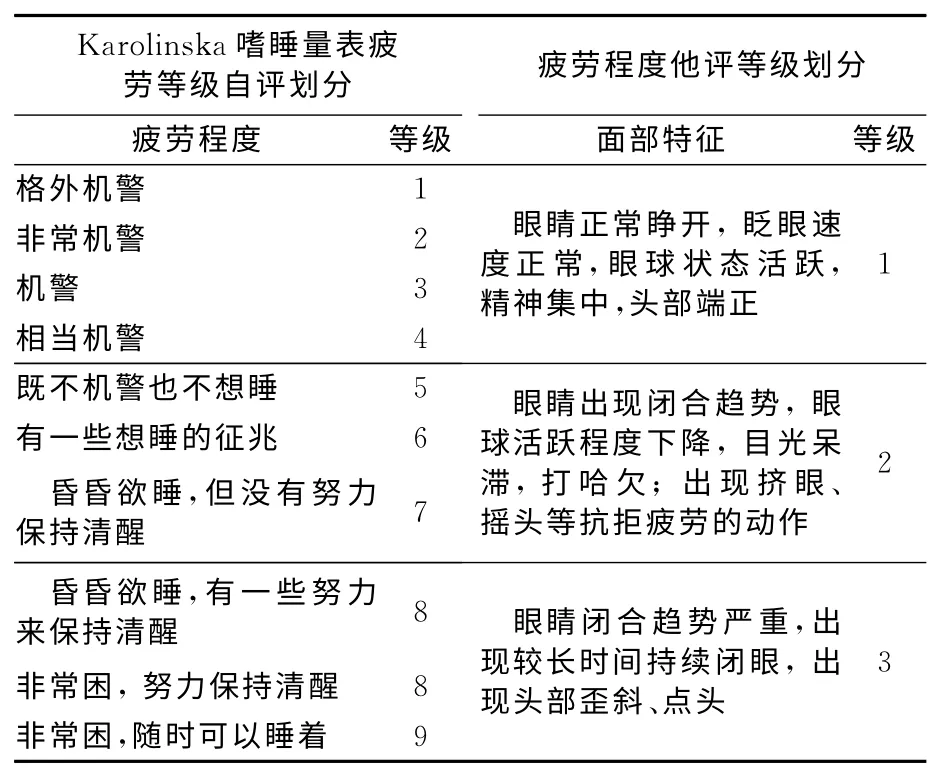
表1 驾驶人疲劳程度自评和他评划分表Tab.1 The driving fatigue rating scale for drivers and researches
1.3 实验组织
选取10名驾驶人参加实验,被试人实验前日睡眠及身体状况正常。实验要求驾驶人尽量保持在中间车道行驶,车速控制在80~100km/h。VIRTOOLS后台程序每隔0.1s采集1 次转向盘转向数据。实验过程中工作人员每隔15 min提示驾驶人对其疲劳状态进行自我评价,并对驾驶人状态作出他评。为提高驾驶人状态自评准确性,事前告知驾驶者状态自评打分参考界限为4和8,4分及以下为清醒;8分及以上为深度疲劳。
实验连续进行3h。其中有5名驾驶人疲劳程度从清醒到深度疲劳连续变化,无状态逆向发展情况发生。由于驾驶人疲劳程度的发展受环境条件影响较大,驾驶人坐姿的调整、喝水、哈欠等动作都可能缓和当时的疲劳程度,因此会出现连续驾驶实验时疲劳程度并不严格随时间的递增而加深的情况出现。对比该5名驾驶人疲劳程度自评与他评结果,两者匹配度达94.8%,表明其疲劳状态自评具有较高可信度。选择该5名驾驶人转向数据用于分析。
2 转向信号小波分解
2.1 道路线形影响修正
对5名驾驶人的初始转向数据进行道路线形影响修正:如果在5s内连续左转,或者在1.7s内连续右转,此时就认为驾驶人正通过弯道。用这些点的数据分别减去它们的均值可认为部分去除了弯道对转向盘转动操作的影响。图2表示了转向数据经过处理前后的变化。
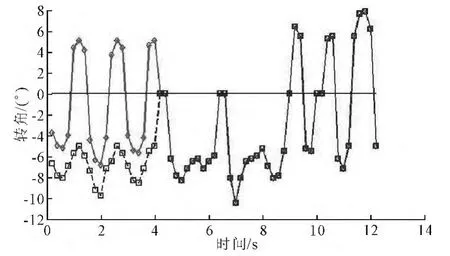
图2 道路线形影响消除前后的转向盘数据对比Fig.2 The steering data before and after curve effect elimination
2.2 小波多分辨分析及能量熵测度[15]
小波多分辨率分析是利用正交小波基将信号分解为不同尺度下的各个分量,其实现过程相当于重复使用1组高通和低通滤波器对时间序列信号进行逐步分解,信号与高通滤波器做卷积运算并向下抽样可产生信号的高频细节分量,信号的低频细节分量产生与此类似。每次分解后,将信号的采样频率降低一半,下一步对低频分量重复以上的分解过程,得到下一层次的2个分解分量。若用Dj(k)表示高频分量信号,Aj(k)表示低频分量信号,J为最大分解尺度,则转向信号序列x(n)可以表示为

式中:Dj(n)为转向信号x(n)在不同尺度的信号分量。
在信息论中,熵表示每个符号所提供的平均信息量和信源的平均不确定性,它能提供关于信号潜在动态过程的有用信息,而小波变换可以放大某一局部的特性,因此计算小波能量熵值就能够发现信号中微小而短促的异常。沿尺度分布的小波能量熵测度定义如下。
令信号x(t)在j尺度k时刻上的小波系数矢量为Wjk=(wjk1,wjk2,…,wjkn),则j尺度k时刻的小波能量可表示为


2.3 转向信号小波能量熵计算
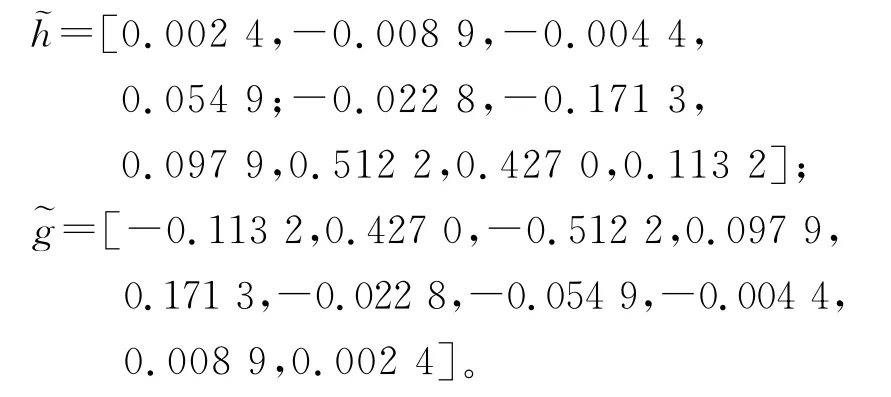
由于不同小波基支撑长度和规则性有很大差别,同一小波基不同分解尺度下对信号特征反映效果也不同。经过多次比选,选择Daubechies小波对转向信号进行5 层分解。对于Daubechies小波,其低通滤波器和高通滤波器系数为
采样间距不宜过大或过小。过大易造成信号特征表现不明显,过小则容易放大偶然因素造成的异常数据对小波能量值的影响。笔者选择每100s提取1个采样点。同时,为减少因外界干扰如喝水、调整坐姿、规避仿真场景中障碍物等造成驾驶转向数据的异常波动,按式(4)对转向数据j时刻的小波能量进行平滑修正。

式(4)的意义在于对于每一采样时刻点的小波能量值,综合考虑前2个采样时刻点的驾驶人的驾驶状态进行修正。
此外,对驾驶人在疲劳状态下转向盘的修正特性进行分析可知,方向盘控制往往会出现3个阶段,见图3。正值表示转向盘顺时针转动,负值表示转向盘逆时针转动。阶段一中,驾驶人会突然大幅度修正转向盘,此时驾驶人刚从疲劳瞌睡中短暂清醒过来,意识到车身发生不受控偏移后产生紧急车辆控制操作;阶段二中驾驶人保持频繁的小幅度修正转向盘,此阶段驾驶人能继续阶段一后的清醒状态,但由于疲劳没有得到缓解只能保持一小段时间,很快又将陷入瞌睡状态;阶段三中,驾驶人处于瞌睡状态,对道路环境敏感程度下降,转向盘基本上没有修正。这3个阶段随着时间的推移不断重复出现。3个阶段中阶段一的操作特征是疲劳驾驶的典型转向特征,但在现实条件中往往只在短暂的时间内出现,且随着疲劳程度不断加深,上述循环时间增长,因而疲劳典型特征出现时间间隔也增长,由于期望每100s提取的小波能量值能反映该段时长结束时的驾驶状态,就必须避免要求即使采样时刻处于深度疲劳状态,但其小波能量值较低的情况发生。故按式(5)对式(4)中转向数据j时刻的小波能量做进一步修正:

式中:Ejk(i)为在采样点i的小波能量;Ejk(i)″为最终修正后采样点i的小波能量。
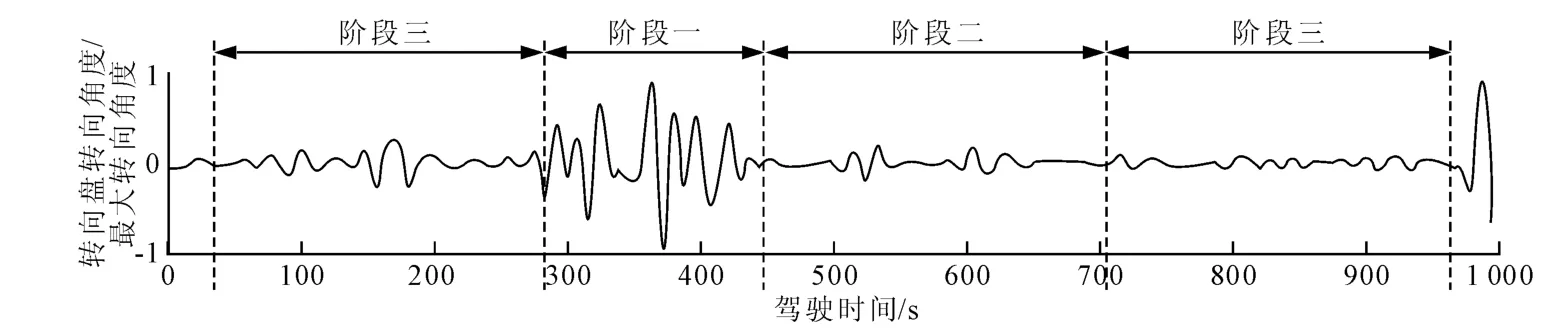
图3 疲劳状态下方向盘修正变化过程Fig.3 Steering wheel correction process under fatigue driving condition
以200s为小波能量熵提取周期,计算驾驶人实验过程中转向盘转向能量熵随时间变化情况见图4。选取的能量熵曲线对应实验中驾驶人疲劳程度从清醒到深度疲劳连续变化,无状态逆向发展的一段。由于所分析的5名驾驶人在整个实验过程中疲劳程度一直呈现持续加深,因此该能量熵曲线代表了整个实验过程中驾驶人的转向盘转向能量熵变化趋势。可以看出,随着疲劳程度的加深,能量熵曲线呈上升趋势,这是因为驾驶人对车辆的控制能力减弱,转向盘的操控趋向于混乱所致。利用方差分析ANOVA 检验转向能量熵与疲劳程度之间的相关关系,见表2。5名驾驶人的转向能量熵与疲劳程度之间都呈现显著相关关系。
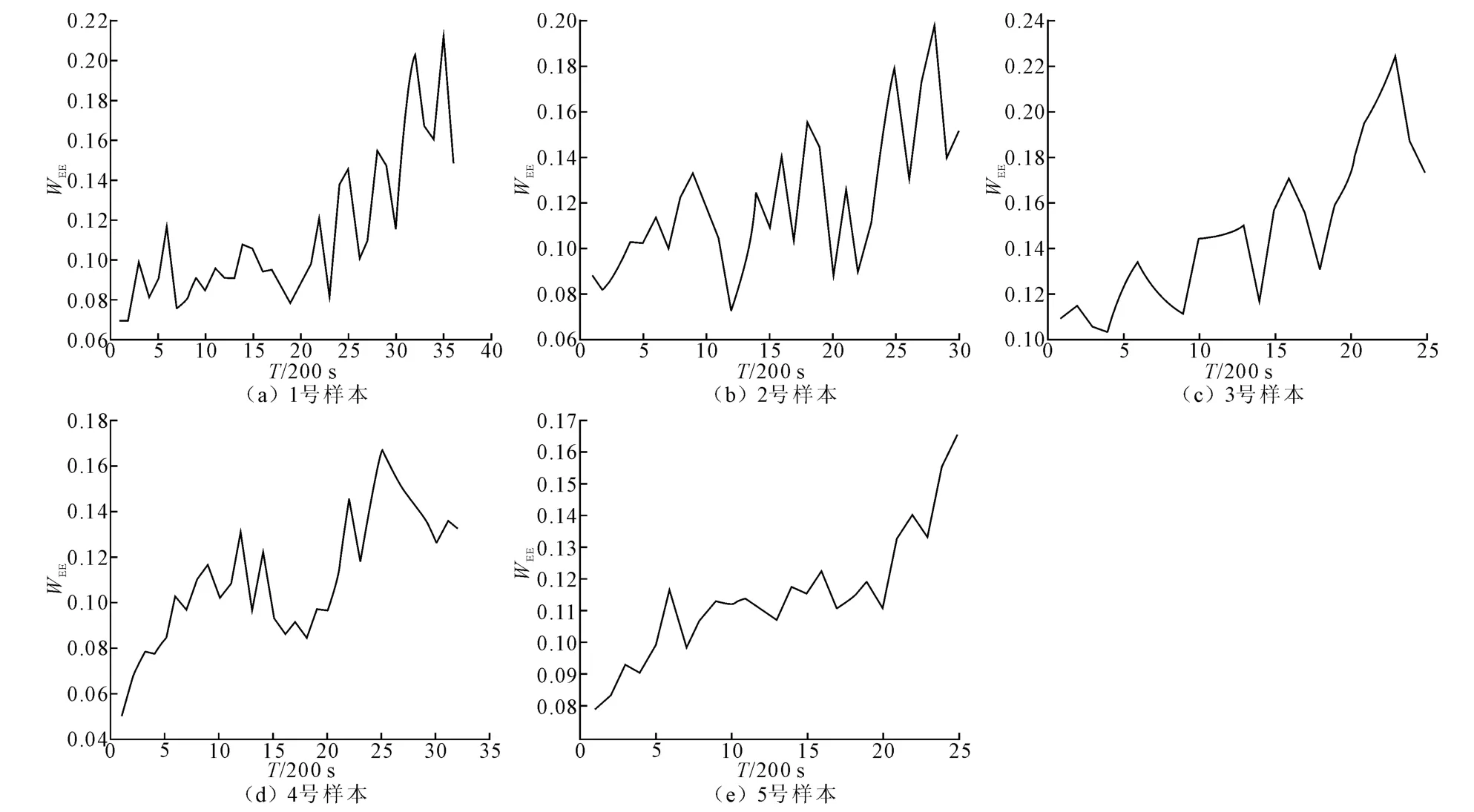
图4 驾驶人转向盘转向能量熵随时间变化Fig.4 The steering wavelet entropy development along with time

表2 转向盘转向能量熵与疲劳程度ANOVA检验Tab.2 The ANOVA test between steering wavelet energy and drowsiness level
进一步分析驾驶状态各阶段WEE值变化情况可知,5名驾驶人在疲劳程度发展的过程中WEE值变化范围为(0.05,0.24);最大值在(0.16,0.24)之间,最小值在(0.05,0.11)之间,这与驾驶人开始测试时的初始精神状态不一致,以及个体差异导致疲劳发展各阶段持续时间长度不一致有关,然而在实验中所有驾驶人均完整经历了从开始产生疲劳,到进入深度疲劳的这一阶段。取这一阶段的转向数据进行分析,计算清醒末期最后200 s(即疲劳初期)以及疲劳末期最后200s(即深度疲劳前期)的小波能量熵WEE值,可知疲劳末期小波能量熵值比疲劳初期增长50%~60%,见表3。

表3 疲劳初期及末期小波能量熵变化Tab.3 The steering wavelet energy development in early and late phase of drowsiness
3 结束语
笔者基于驾驶仿真数据,比较驾驶人在不同驾驶状态下的转向行为,发现转向信号的Daubechies小波尺度5下的能量熵分布与疲劳程度存在显著相关关系,随着疲劳程度的加深,能量熵曲线呈上升趋势。由于能量熵是用来衡量体系的混乱程度,用转向熵并不涉及具体的转向角度,因此可以受道路线形的影响更小,实现更高的检测精度。对疲劳不同阶段转向能量熵的分析表明,驾驶人疲劳末期(深度疲劳前期)的小波能量熵比疲劳初期增长50%~60%。
研究限于实验条件,仿真驾驶只选择了10位驾驶人。但即使进行大样本量的仿真实验,由于驾驶行为受个体差异影响很大,也很难得到一致的各疲劳程度等级下转向盘转向小波能量熵的对应阈值。研究中不同驾驶人在整个疲劳发展过程中表现出差异较大的能量熵绝对值变化范围,然而却在相邻疲劳程度等级之间的能量熵差异上表现出了相同的变化趋势,这种趋势受个体差异的影响较小,即使在小样本量下,也能得到很好的体现,因此本文所揭示的这种变化趋势对于驾驶疲劳检测仍具有一定现实意义。
研究只揭示了对于不同驾驶人,驾驶疲劳状态等级“疲劳”与“深度疲劳”之间转向盘转向能量熵变化存在近似的范围,但未给出等级“疲劳”何时开始的判定依据,而在疲劳驾驶实时检测中判定刚刚开始的疲劳对于减少交通安全事故十分重要。因此未来有必要进一步研究驾驶疲劳初期的方向盘转向小波能量熵特征。
[1]McCallum M,Sanquist T,Mitler M,et al.Commercial transportation operator fatigue management reference[J].Prepared for the US Department of Transportation Research and Special Programs Administration,2003,29(3):32-47.(in Chinese).
[2]中华人民共和国道路运输条例(2012年修订)[Z].北京:中华人民共和国国务院.The people's Republic of China road transport regulations(revised in 2012)[Z].Beijing:The State Council of the people's Republic of China.(in Chinese)
[3]Saroj K L,Ashley C.Reproducibility of the spectral components of the electroencephalogram during driver fatigue[J].International Journal of Psychophysiology,2005,55(2):137-143.
[4]Schlogl A,Kemp B.Penzel T,et al.Quality control of polysomnographic sleep data by histogram and entropy analysis[J].Clin Neurophysiol,1999,110(12):21-36.
[5]Moraes J,Freitas M M,Vilani F N,et al.A QRS Complex Detection Algorithm Using Electrocardiogram Leads[J].Computer in Cardiology,2002,29(3):205-208.
[6]Wierwille W W,Lewin M G,Faibanks R J.Research on vehicle based driver status/performance monitor(PartⅢ)[C]∥Transportation Research Board Annual Meeting,Washington D.C.:Transportation Research Board of the National Academies,1996.
[7]Heitmann A,Guttkuhn R,Aguirre A,et al.Technologies for the monitoring and prevention of driver fatigue[C]∥Proceedings of the First International Driving Symposium on Human Factors in DriverAssessment,Training and Vehicle Design.Colorado,Iowa:USA Public Policy Center,University of Iowa,2001:81-86.
[8]叶晓林,杨海波.认知负荷对驾驶行为影响的眼动研究[J].交通信息与安全,2012,30(6):67-71.Ye Xiaoling,Yang Haibo.Eye movement study of the effect of cognitive load on driving behavior[J].Journal of Transport Information and Safety,2012,30(6):67-71.(in Chinese).
[9]Lee D,Oh S,Heo S,et al.Drowsy driving detection based on the driver's head movement using infrared sensors[C]∥Proceedings of the 2008Second International Symposium on Universal Communication.IEEE Computer Society,Osaka,Japan,2008:231-236.
[10]Kithil P W,Jones R D,Jone M .Development of driver alertness detection system using oberhead capacitive sensor array[J].SAE Technical Paper Series 982292,SAE International,1998:35-56.
[11]Eskandarian A,Sayed R,Delaigue P,et al.Advanced driver fatigue research[R].Washington:U.S.Department of Transportation Federal Motor Carrier Safety Administration,2007:21-24.
[12]张希波,成 波,冯睿嘉.基于方向盘操作的驾驶人疲劳状态实时检测方法[J].清华大学学报:自然科学版,2010(7):1072-1076.Zhang Xibo,Chen Bo,Feng Ruijia.Real-time detection of driver drowsiness based on steering performance[J].Journal of Tsinghua University :Natural Science Edition,2010(7):1072-1076.(in Chinese).
[13]Shahid A,Wilkinson K,Marcu S,et al.STOP,THAT and One Hundred Other Sleep Scales[M].Springer,2012.
[14]孙延奎.小波变换与图像、图形处理技术[M].北京:清华大学出版社,2012.Sun Yankui.Wavelet transform and image processing technology[M].Beijing:Tsinghua University Press,2012.(in Chinese).
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
科技风(2021年19期)2021-09-07 14:04:29
意林(2021年2期)2021-02-08 08:32:47
电子制作(2019年13期)2020-01-14 03:15:32
法律方法(2019年4期)2019-11-16 01:07:28
制造技术与机床(2017年10期)2017-11-28 05:20:43
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
电测与仪表(2014年8期)2014-04-04 09:19:38
断块油气田(2014年6期)2014-03-11 15:33:53
