
基于Matlab和西门子IP427的半实物风电运行控制仿真实验台设计分析
2014-12-14 11:29:16邢作霞肖泽亮王雅光刘志武
风能 2014年4期
邢作霞,肖泽亮,王雅光,刘志武
(沈阳工业大学新能源工程学院,辽宁 沈阳 110023)
基于Matlab和西门子IP427的半实物风电运行控制仿真实验台设计分析
邢作霞,肖泽亮,王雅光,刘志武
(沈阳工业大学新能源工程学院,辽宁 沈阳 110023)
本文介绍了采用模拟仿真的方法,开发半实物风电运行控制仿真实验台。该实验台采用软件模拟各种工况下风电机组运行情况,通过人机交互界面HMI来监控风电机组运行状况。该实验台为教师和学生提供一个教学实验平台,也方便专业人士研究风电运行控制技术。
风电;主控系统;程序设计;半实物仿真
0 引言
随着变速变桨风电机组的发展,风电机组控制系统的设计开发变得越来越容易实现,并且显示出较好的应用前景[1-3]。我国的变速恒频控制策略主要集中体现在变流器的控制算法上,通过转速、转矩及变桨的方式对风电机组的功率和载荷进行整机综合控制[4],但机组控制技术与国外先进技术还有较大差距。设计规划一套风电机组主控系统动态仿真实验台显得极为重要,该实验台采用软件模拟各种工况下风电机组运行情况,通过人机交互界面HMI来监控风电机组运行状况。需要测试的运行控制系统(变桨距控制策略)、偏航执行机构为实物形式,液压站和齿轮箱为状态灯形式,通过信息的实时交互,可实现控制算法和执行机构的测试。
1 风力发电主控实验台开发
全面系统的模拟兆瓦级风电机组执行机构、传感器的状态及其控制主要包括[5]:偏航、变桨、液压站、刹车、齿轮箱润滑、变桨轴承润滑、机舱温度及热交换、航空障碍灯及机组运行状态、安全链等。采用软件仿真模拟风电机组的气动及传动系统特性,并实现风电机组的变桨和转矩闭环控制。实验台外形如图1所示。
实验台可进行如下实验:
(1)通过偏航电路设计,可以编程实现偏航电机的启停、互锁及扭缆极限保护控制;
(2)通过脉冲计数,PLC编程实现偏航方向判断及偏航角度计算;
(3)依据风向模拟输入信号,进行PLC编程,实现风电机组偏航自动对风控制,观察机组偏航角度变化情况;
(4)编程实现机组的启动、停机过程,液压站松闸、抱闸刹车动作,观察机组转速变化过程;
(5)编程实现齿轮油泵启、停,根据油温,进行齿轮油冷却风扇、加热温度控制,观察油温变化情况;
(6)手动模拟安全链故障,编程实现机组紧急停机,观察机组实时状态响应;
(7)发电工况下,编程实现风电机组变桨和转速-转矩曲线控制,观察机组的稳定发电运行情况,功率输出实时变化情况。
2 主控制器及PLC硬件结构的选择
由于风电机组对数据处理和CPU运算速度要求比较高,子系统较多且要处理的任务复杂,因此主控制器选用西门子SIMATIC IPC 427C。风电机组主控实验台PLC整机结构包括以下部分:
(1)以太网交换机采用的是6GK5005 0BA00-1AB2,5×10/100Mbit/s RJ45端口,LED诊断,24伏直流供电;
(2)远程IO站采用的是6ES7151 3AA23-0AB0,通讯接口为PROFINET,24V直流供电;
(3)电源模块采用的是6ES7138 4CA01-0AA0,用于电子版模块,24V直流供电;
(4)数字量输入采用的是6ES7131 4BF00-0AA0,8位数字输入,24V直流供电;
(5)数字量输出采用的是6ES7132 4BF00-0AA0,8位数字输出,24V直流供电;
(6)模拟量输入采用的是6ES7134 4FB01-0AB0,8位模拟输入,24V直流供电;
(7)模拟量输出采用的是6ES7135 4FB01-0AB0,8位模拟输出,24V直流供电;
(8)通讯模块采用的是6ES7138 4DF01-0AB0,RS232、RS422、RS485串行接口,24V直流供电。
3 主控实验台的软件架构
3.1 主控制器网络架构
风电机组主控实验台整机控制网络拓扑如图2示。
(1)主控制器(IPC427C):通过PLC及电路实现风电机组各种状态(启动、待机、停机、运行、紧急停机等)的切换、各执行机构控制过程、故障处理过程及发电运行控制;

图1 实验台外形照片
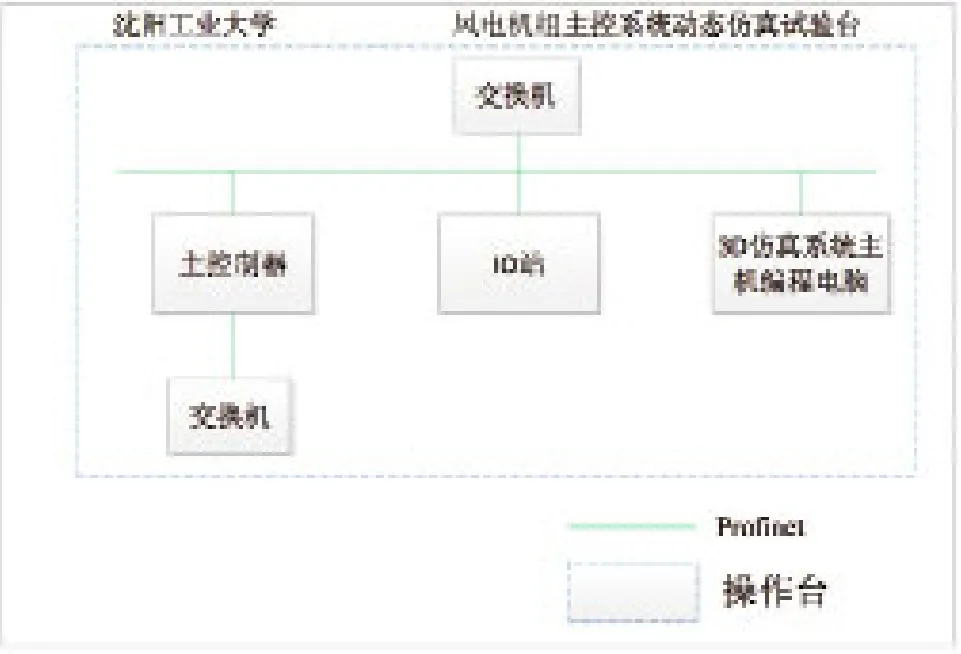
图2 主控实验台硬件构成
(2)人机交互界面(HMI):HMI界面可实现趋势图显示,故障报警,数据归档等功能;
(3)远程IO站(IM151-3):ET200S 作为远程IO子站,主要负责采集主控系统外围设备的信号的采集。IO模块的类型也满足风电机组常见传感器类型,包括了DI、DO、AI、AO等功能。本主控系统实验台整机通讯采用基于TCP/IP的PROFINET实时以太网,最高传输速率可达1000MBit/S,极其方便了系统的扩展与调试。整机采用西门子最新的实时以太网PROFINET作为控制网络;
(4)编程电脑:可在上位机上实现学生编程和后台模拟仿真功能,并且可在上位机上实现风电机组风能捕获及机械传动的动态仿真,与PLC编制的控制程序进行信息交互。3D仿真系统主机:运行风电机组的3D simulation模型,三维模拟变桨、偏航、齿轮箱、发电机等过程;3D simulation风电机组模型预留数据接口,可实现与西门子控制器进行连接通讯。
3.2 控制系统程序设计
控制系统由参数检测、数据库处理、故障处理、功率调节4个模块组成。变桨距机构通过改变叶片桨距角的大小,从而改变叶片气动特性,使桨叶和整机的受力状况大为改善。发电机起动时,通过改变桨距角获得足够的起动转矩;风速过高时,叶片旋转以保持一定的输出功率(额定功率),同时减少对机组的冲击;还可以实现快速无冲击并网[6]。变桨距控制与变速恒频技术相结合,可以提高风力发电系统的效率和电能质量。
(1)自动偏航
该过程是以风向传感器输出为基准,当风向改变超过允许误差范围时,控制器发出自动偏航指令;
(2)自动解缆
当某个方向达到10800 deg时,无论机组是否运行,机组都将执行自动解缆;
(3)人工偏航
人工偏航是指在自动偏航失败、人工解缆或者是在需要维修时,通过人工指令来进行的风力发电机偏航措施。
4 人机交互界面与三维动画模拟
4.1 人机交互界面
SIMATIC WinCC Flexible 2008人机界面编程软件可与西门子主控软件STEP 7独立编程,实时进行风电机组的状态监视及操作,实现相关参数的显示、记录、曲线、报警等功能。通过此监测系统,确保风电机组模型稳定运行,在出现风速超过切出风速、温度报警、并网故障等异常运行状态时执行停机操作。
4.2 风电机组三维动画实时反馈模拟
风电机组的 3D simulation模型,如图3所示[7]。三维模拟变桨、偏航、齿轮箱、发电机等过程,可以更加直观的观察风电机组运行的实时状况;3D simulation风电机组模型预留数据接口,可实现与西门子控制器进行连接通讯,将下载好的程序与3D simulation模型连接,验证所编写的程序是否合理,减小了实际风电机组运行所带来的危险。
5 基于FAST/MATLAB/GH Bladed的半实物仿真
本实验台采用FAST、MATLAB和GH Blade这3种仿真工具的联合,使机械模型、电气系统和控制系统具备完整性,还可以有效地实现风电机组的 3D simulation模型与西门子控制器进行连接通讯,上位机实现学生编程和后台模拟仿真功能并与PLC编制的控制程序进行信息交互。
在MATLAB/Similink环境下设计所需要的控制系统,并对其进行建模与仿真,再通过端口控制器算法实现PLC环境下相对应的控制系统。然后将建立好的MATLAB/Similink环境下的控制系统仿真模块(*.mdl)文件通过PLC中的嵌入式编码器编码生成两种不同的目标文件:通过工程集成在SIMATIC Tools环境下生成SCL Source目标文件;通过实时集成在WinAC RTX环境下生成DLL File目标文件。

图3 风电机组的3D simulation模型

图4 PID控制模块仿真图
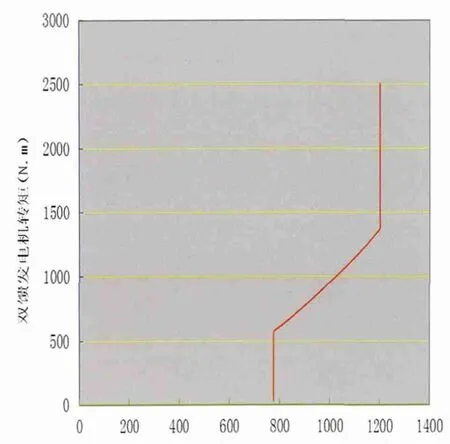
图5 风电机组输出电磁转矩曲线
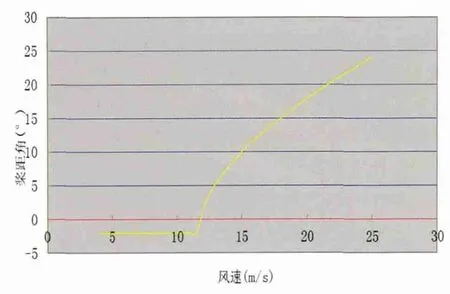
图6 风电机组桨距角曲线
最后,通过在两者不同环境下对同一PID控制模块进行实时运行仿真,如图4所示。比较两者的运行结果基本一致,从而验证了建立MATLAB/Similink 环境和PLC/WinAC RTX环境下的通讯连接可行性。
GH Bladed主要应用于以下目的:风电机组初步设计;详细设计和零部件技术要求;风电机组验证。通过Bladed软件仿真的机组性能曲线如图5、图6所示。
6 结论
本文提出了主控系统整体设计方案,对系统硬件进行选型和配置,搭建风电机组控制系统动态仿真实验台。详细阐述了该主控实验台的硬件结构和软件架构,并给出主控制器的控制程序设计流程。采用SIMATIC WinCC Flexible 2008软件设计了人机交互界面界面,实时监控变桨实验台运行状态参数。主控器与所编制的3D simulation风电机组模型进行通讯,可以更加直观的观察风电机组变桨、偏航、齿轮箱、发电机等运行的实时状况。该实验台开放的编程环境可作为专业人士研究风力发电主控技术使用,也可以作为本科生教学和研究生课题研究使用。
[1] 曾永卫,蔡毅.工程应用型本科产学研合作的分析和探索[J].中国高等教育,2011(7):47-52.
[2] 刘国荣,曾永卫,吴朝建.工程应用型本科全开放实验教学探索[J].中国高等教育,2009(9):11-16.
[3] 杨之俊,吴红斌,丁明,等.故障时双馈风力发电系统的控制策略研究[J].电力系统保护与控制,2010,38(1):14-18.
[4] 特古斯.简易风力发电机模型[J].物理通报,2008(10):58-59.
[5] 陈强,唐西胜,裴玮,孔力.风力发电传动系统的建模与数字模拟研究[J].太阳能学报,2010,11(11):1503-1509.
[6] 李建林,张雷,鄂春良.基于欧姆龙PLC的风电机组变桨距系统[J].应用案例,2010(3):48-51.
[7] 井艳军,陈雷,姚兴佳.风电机组变距系统半实物仿真试验平台[J].沈阳工业大学学报,2012(1):25-33.
Analysis of Simulation Platform Design of Semi-physical Wind Power Operation Control Based on Matlab and Siemens IP427
Xing Zuoxia, Xiao Zeliang, Wang Yaguang, Liu Zhiwu
(School of New Energy Engineering,Shenyang University of Technology,Shenyang 110023,China)
This paper introduces a simulation platform of semi-physical wind power operation control for the training target of new energy professional and technical personnel, which adopts the method of simulation. The platform uses software to simulate wind turbine operation in various conditions and monitors the running status of wind power generator through the man-machine interface HMI.This experimental platform provides a teaching experimental platform for the teachers and the students, and also facilitates the professional to research wind power operation control technology.
wind power; main control system; program design; semi-physical simulation
TM614
A
1674-9219(2014)04-0094-04
邢作霞(1976—),女,副教授,主要从事风力发电教学及智能控制技术的研究。
猜你喜欢
装备制造技术(2021年1期)2021-05-21 07:55:00
大电机技术(2018年4期)2018-09-26 03:11:38
能源(2017年7期)2018-01-19 05:05:05
湖北文理学院学报(2017年2期)2017-04-16 05:09:09
通信电源技术(2016年1期)2016-04-16 04:57:28
工业设计(2016年11期)2016-04-16 02:48:32
电源技术(2016年2期)2016-02-27 09:05:15
制造技术与机床(2015年12期)2015-07-31 17:23:11
电气传动自动化(2014年6期)2014-03-20 13:36:22
自动化博览(2014年12期)2014-02-28 22:34:27
