
基于彩色背景建模的前景检测
2014-12-13 09:48:58孙海军嵇亮亮
江苏科技信息 2014年22期
孙海军,嵇亮亮,王 耿
(中国电子科技集团公司第二十八研究所,江苏南京 210007)
0 引言
对序列图像的运动分析是当前计算机视觉领域的一个重要研究方向,其研究内容相当丰富,在高级人机交互、智能监控、交通监测等方面具有广泛的应用前景。其中一个重要课题就是基于视频的运动目标检测,判断视频序列中是否存在运动目标,并确定运动目标的位置、形状等特征。目前主要的运动检测方法有差分法[1]、光流法[2,3]和背景减除方法[4]。不同方法存在着各自的优缺点,对于背景减除法而言,最主要的难点在于寻找理想的背景模型以及后续背景模型的更新[5]。本文通过对像素统计分析,建立彩色背景及振幅模型的方法来实现前景检测,并持续更新模型。
1 算法整体框架
本文的算法框图如图1 所示。
依图1 所示,首先对图像进行图像预处理,然后初始化背景模型,当初始模型完成后,进行提取前景。在提取前景的过程中,不断对模型进行更新。
2 彩色背景建模
2.1 图像预处理
由于原始图像中往往存在噪声,所以直接求差分受到的影响比较大。因此,在进行背景减除之前,必须先对图像进行滤波处理。本文采用中值滤波的方法,对图像进行平滑处理,剔除了部分噪声。
2.2 背景模型
对于视频图像的某一像素点进行统计,可以发现在大部分的时间段内,该像素点RGB 各通道的亮度值多为背景点的值,变化幅度很小,只有在有前景运动目标通过时,它的值才会发生较大变化,如图2 所示,列出了R 通道的值变化。

图1 算法框图
从图2 中可以发现,当有行人目标通过时,在第15 帧亮度值开始下降,当第25 帧目标进入该点时已经发生了很大的亮度值变化,直到第50 帧目标离开时,亮度值恢复。而当没有运动目标通过时,背景的亮度值维持在180 左右的很小范围内。
本文在求取初始背景模型时,采用对100 帧图像求取各通道的平均值,得到初始的背景,公式如下:其中,In为第n 帧图像,bg 为背景图像。


图2 运动前景分析图
这里要求视频的初始100 帧最好是以背景居多的时段,如果是前景目标较多,则会影响初始的前景检测,但通过背景更新,之后仍然可以得到正确背景。
2.3 背景像素振幅值模型
从之前的分析,已经知道背景值是在一定的区间范围内变化的。在得到初始彩色背景模型后,我们已经知道每一个像素点的基准值(即背景值)。那么之后的图像与背景差分,如果差值落在振幅范围之内的,可以认为是背景,振幅之外则认为是前景。
不难发现,其实像素点的亮度值服从高斯分布的,本论文提出的背景模型是基于像素的,每一个像素点的亮度值都可以看作是一个独立的随机过程,在较长的时间段内,背景的像素点的颜色值稳定分布在一个确定值的领域内。这也是本文算法的理论依据及基础。对于高斯分布模型,利用图像序列在得到均值之外,还可以估计出方差,这样就可以描述该高斯分布。这里除了假设每个像素点是独立之外,为了计算方便还假设每个像素点的颜色分量都是独立分布,服从一维高斯分布[6]。
在云计算层,使用Rest代理对智能传感设备和数据存储平台的时间响应并进行标记属于快消息还是慢消息;业务引擎在收到业务后,对业务进行过滤,通过业务处理时长与队列处理基准时长的比较结果动态调整队列映射配置表,随后将处理结果转发给智控引擎;智控引擎根据应用层的需要进行智能调控,并将相关的调控信息发送给推送引擎;推送引擎通过智能数据管理平台(Smart Data Management Platform, SDMP)引擎将指令发送给相应的智能终端,从而对用电设备发起控制。
所以本论文除了一般的初始背景图像建模外,还对每个像素点的振幅值进行建模。公式如下:

其中,In为第n 帧图像,bg 为背景图像,S 为背景振幅值,皆为与图像有相同大小的三通道矩阵。
本论文在初始背景建立后,继续利用100 帧图像对背景振幅值进行建模。即经过共200 帧的初始化阶段,就完成了自动彩色背景建模的工作。
3 前景提取
在背景建模初始化之后,就进入检测阶段,在已经获得了彩色背景图像的基础上,利用背景减除法的方法可以很容易得到前景图像。比较当前图像和背景图像中对应像素点的差异,如果某一通道的差值大于背景振幅阈值,则可以判定该像素点为前景。
对于输入的视频图像I 与背景图像bgImg 和背景振幅值sgm 进行比较,判断背景与前景区域:

其中,I(x,y,i)为输入图像在坐标(x,y)处i 通道的值,bg(x,y,i)和S(x,y,i)分别代表背景图像和背景振幅在坐标(x,y)处i 通道的值,C 代表调整参数,为常数,这是一个经验调整值,可根据具体场景调节背景振幅阈值。
若根据上述公式计算得到的图像点(x,y)处三通道的差值都小于0,则表示输入的当前图像在(x,y)处为背景图像,否则判定为前景图像。
4 模型更新
在一般的监控场景中,光线会随着时间或其他原因变化从而引起图像全局或者局部亮度的变化。而且场景中也可能存在进入固定物体或者原有物体的移出,对于这部分区域,应该在一段时间之后,能够正确更新得到正确的背景。所以背景模型必须要具有自适应性,需要实时地对背景模型进行更新。
为了满足系统的实时性要求,采用计算简单的移动均值的方法来更新比较适合。但一般的移动均值法,无论前景还是背景,都按照同一策略统一计算。这样将前景和背景以同样的权值更新,势必会对新的背景图像产生影响,造成错误的背景模型,对后面的检测过程也会有影响。因此,本文采用改进的移动均值法对背景图像和背景振幅进行更新,根据前景提取的结果,对前景和背景采用不同的更新策略,具体如下:
其中,I 为当前帧图像,bg 为背景图像,fg 为前景二值图像,B 和F 分别为背景更新率和前景更新率,都为常数,F 取值大于B。
同样地,对于背景振幅值,也需要对其进行更新。首先计算当前帧图像的振幅值,然后和背景更新一样的更新策略进行更新,公式如下:

其中,S′为当前图像与背景图像比较得到的当前振幅值,S 为图像的背景振幅值。
5 结果分析
图3 所示的是运用本论文的背景建模算法进行背景提取的结果。3 个时刻点的光线随着时间的迁移逐渐变暗,背景提取结果十分良好,并且能够适应环境变化。
图4 所示的是不同场景下前景提取结果的示意图,结果表明在基于本文背景建模和前景判断算法,能够较好的提取运动目标。
6 总结
本章提出了一种基于背景建模减除法前景检测算法。在对现有的背景建模方法分析之后,本文提出的一种准确、快速、适应能力强的背景建模方法,主要包括背景建模、背景振幅建模、前景提取以及背景与背景振幅更新。实验分析表明,本文的前景检测算法具有较好的准确性与鲁棒性。

图3 背景提取结果示意图
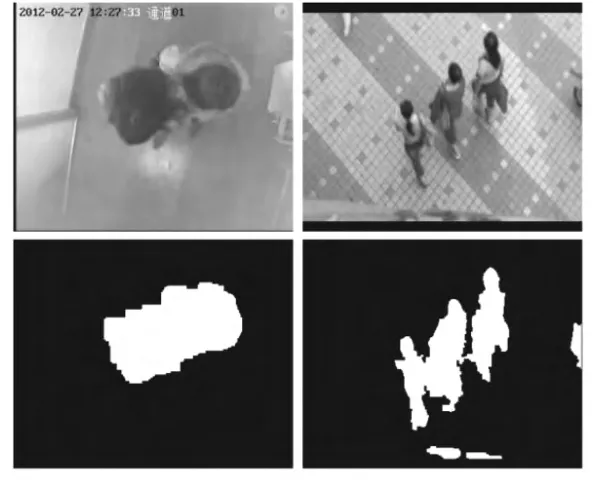
图4 前景提取结果示意图
[1]Lipton A J,Fujiyoshi H,Patil R S.Moving target classification and tracking from real-time video[C].Fourth IEEE Workshop on Applications of Computer Vision,1998.
[2]Horn B K P,Schunck B G.Determining optical flow[J].Artificial intelligence,1981(1).
[3]Tekalp A M,Tekalp A M.Digital video processing[M].Upper Saddle river,NJ:Prentice Hall PTR,1995:126-132.
[4]Kornprobst P,Deriche R,Aubert G.Image sequence analysis via partial differential equations [J].Journal of Mathematical Imaging and Vision,1999(1).
[5]Collins R T,Lipton A,Kanade T,et al.A system for video surveillance and monitor ing[M].Carnegie Mellon University,the Robotics Institute,2000.
[6]Huwer S,Niemann H.Adaptive change detection for real-time surveillance applications[C].Third IEEE International Workshop on Visual Surveillance,2000.
[7]柴进.视频监控中的人数统计和人群密度分析[D].西安:西安电子科技大学,2011.
[8]李立仁,李少军,刘忠领.智能视频监控技术综述[J].中国安防,2009(10).
猜你喜欢
建材发展导向(2021年6期)2021-06-09 05:57:08
今日农业(2020年17期)2020-12-15 12:34:28
中国外汇(2019年11期)2019-08-27 02:06:32
电脑知识与技术(2018年35期)2018-02-27 13:29:44
自动化学报(2017年11期)2017-04-04 02:52:44
股市动态分析(2016年24期)2017-01-07 08:56:09
股市动态分析(2016年4期)2016-09-29 08:42:21
股市动态分析(2016年25期)2016-07-23 07:31:08
太空探索(2016年10期)2016-07-10 12:07:01
电视技术(2014年11期)2014-12-02 02:43:28
