
AUV探测段的模块化设计
2014-12-13 02:39章远香
中国科技纵横 2014年4期
章远香
(中船重工715所,浙江杭州 310012)
AUV探测段的模块化设计
章远香
(中船重工715所,浙江杭州 310012)
本文介绍了AUV探测段的结构组成,为了实现各项探测功能,对探测段的进行了功能分解,对各部分进行了模块化设计,各模块和平台间采用相同的标准接口,可根据探测任务的需求,对各种模块进行加载,这样既能保证完成探测任务,又能满足平台的加载能力。
AUV 探测段 模块化
1 引言
近年来,由于海洋工程和近海石油开发的需要,代表水下机器人发展方向的AUV得到了快速发展,AUV广泛应用于海洋救助与打捞、海洋资源调查、海洋石油开采、水下工程施工、军事国防建设等诸多方面,已产生了巨大的经济效益和社会效益,具有潜在的应用前景。从长远目光看,AUV向着智能化、远程化迈进,作为海洋开发的重要工具,要保证能够在复杂的海洋环境中高效、安全的工作,设计开放式AUV平台,各种功能模块化加载,就能使AUV平台能实现不同的探测任务,从而有效地降低了成本,本文应用模块化设计理念,实现了AUV探测段的模块化设计。
2 模块化设计理念
产品模块化设计就是将产品分成几个模块,每个模块具有独立的功能,具有一致的几何连接接口和一致输入、输出接口的单元,相同种类的模块在产品族中可以重用和互换,相关模块的排列组合就可以形成最终的产品,通过模块的组合配置,就可以创建不同需求的产品,满足客户的定制要求,相似性的重用,可以使整个产品生命周期中的采购、物流、制造和服务资源简化。
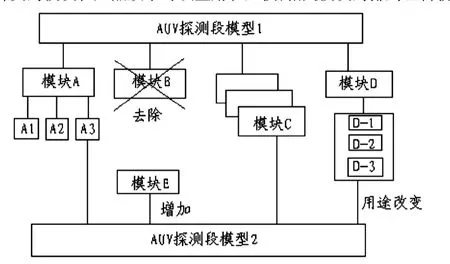
图1 AUV探测段模型集成图
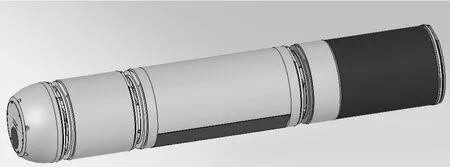
图2 AUV探测段组成示意图

图3 AUV探测段模型示意图

表1 AUV模块重力、浮力、重心、浮心表
AUV探测段是加载到AUV平台上的,平台为其提供功率,由于探测任务的多样化,探测段加载的模块就具有多样性,全部集成在一起,会导致探测的尺寸和功率都比较大,而导致整个AUV的尺寸和所需功率的增大,因此对AUV探测段提出模块化设计,将AUV探测段模型分成多个模块,而根据探测任务的需要,加装相关的模块。
如图1所示,假设AUV探测段模型1有4个模块(A、B、C、D),可以通过对这4个模块的操作重新构成另一个具有不同任务要求的AUV探测段模型2,图1显示了每个操作对模块化系统的影响,模型1中模块A在模型2中被沿用并成为模型2的一部分;由于探测任务的不同,模型1中模块B被去除;3个可互相替代的因素构成了模块系列C,考虑成本等因素,可选择模块C系列中的1个作为AUV探测段模型2的一部分,考虑到探测任务的不同,在模块2中增加了模块E,模块D在模型2种的用途被改变了。
3 探测段的模块化设计
3.1 探测段的组成
探测段是AUV的负载段,实现探测功能,平台总体技术主要研究微小空间总体结构布局及设计、小型航行体流体动力外形设计、大深度承压密封设计等内容。重点解决平台模块化、接口标准化设计,以构建开放式AUV平台,实现平台功能扩展性和执行多样性探测任务。
探测段采用干式结构,壳体为耐压壳体,用来装置电子元器件及探测设备,以保证它们不会因为海水的压力和腐蚀而损坏,因此耐压壳体要有足够的强度和可靠的密封,同时,耐压壳体也是浮力的主要提供者,而它的重量也占可AUV重量的很大比例,所以耐压壳体的结构形式,强度和密封,对AUV是至关重要的。探测段耐压壳体采用铸铝成型。各模块间采用不锈钢环箍,模块连接采用O形圈静密封。拆卸简单、快捷。
如图2所示,探测段按功能分成4个模块,各个模块相对独立,具有标准的接口,模块A主要安装避碰声纳、水密插座、UTD等,模块B是探测段的控制中心,模块C安装了侧扫声纳,模块D安装了多波束声纳。
3.2 探测段的模块化设计
探测段与平台实现模块化接口,探测段本身需加载多波束、侧扫,避碰等负载,考虑到整个AUV的性能,将各个负载分成不同的模块,根据探测任务的需要,将不同的模块进行加装。如图3所示,AUV探测段模型1加装了模块A、B、C;模型2加装了模块A、B、D,模型1能实现避碰、侧扫等功能,模型2能实现避碰、多波束等功能。
为了保证AUV稳定运行,应保证有一定的稳心高度,一般水下机器人稳心高度应大于7厘米,在模块化设计中,要计算出各个模块的重心、浮心,设计中使各个模块的重浮心基本上都能满足要求,并在合适的位置预留配重空间,将各个模块的重浮心列成表格,以方便配置模型时与平台总体进行核算。
各个模块分别以各模块前端中心点为原点,轴向朝后为x方向,竖直向上为z方向,右手定则水平方向为y方向。如表1所示,分别列出了各个模块的重力、浮力、重心、浮心。
模型的重心、浮心按下列公式计算:
重心位置:

浮心位置:

需要注意的是,计算模型重浮心时,须将坐标系合成统一的坐标系。
4 结语
本文将产品模块化设计理念运用到AUV探测段的设计中,对AUV探测段实现了模块化设计,使AUV平台成为了一个开放式平台,探测段模块化设计,使平台的负载能力得到了充分的利用,也为平台的负载能力扩展提供了空间。
[1]蒋新松等编著.水下机器人.辽宁科学技术出版社,2000.11.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
海洋信息技术与应用(2022年1期)2022-06-05
减速顶与调速技术(2022年3期)2022-02-11
舰船科学技术(2021年12期)2021-03-29
现代装饰(2020年5期)2020-05-30
石油化工建设(2019年6期)2020-01-16
中国特种设备安全(2019年9期)2019-12-03
制造技术与机床(2019年4期)2019-04-04
中国核电(2017年2期)2017-08-11
流程工业(2017年4期)2017-06-21
