
基于FPGA的CCD光轴检测系统研究与实验
2014-12-07 06:57母一宁宋路
长春理工大学学报(自然科学版) 2014年6期
母一宁,宋路
(长春理工大学 理学院,长春 130022;长春理工大学 电子信息工程学院,长春 130022)
瞄准捕获跟踪(APT)是空间激光通信系统的重要组成部分,而入射光轴的探测精度跟踪带宽将直接决定对准精度[1]。本文研究了一种基于FPGA的 CCD光轴检测系统,主要包括CCD时序驱动、数据采集和CCD光轴检测算法等,最后给出这种以CCD为代表的阵列光轴检测系统的检测精度与检测模型分析。
1 光轴检测系统的电学结构
光轴检测系统的硬件结构分为三个部分,分别是CCD成像驱动、光轴检测处理和外设接口,系统组成框图见图1。
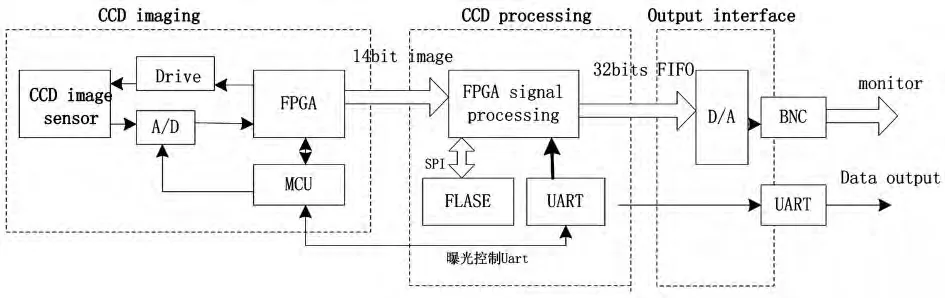
图1 CCD成像及图像处理框图
1.1 CCD驱动成像单元

图2 CCD驱动脉冲波形图
该单元包括CCD图像传感器、FPGA器件和MCU控制器。FPGA用于CCD成像和图像数据流预处理,主要是产生CCD水平和垂直驱动时序,驱动AFE采集CCD输出信号,接收AFE的串行数据并完成数据解码、对齐和打包。FPGA的工作参数由MCU进行设定。CCD成像单元设计有串行接口,可以通过串行接口去调整相机的曝光时间,输出增益,输出帧频,暗电平灰度值等参数。
1.2 光轴检测与处理单元
本单元FPGA用于图像后续处理,主要完成图像binning、光轴检测、串口指令解析、串口数据输出、PAL模拟视频输出、数字视频输出的功能。光轴检测单元是整个系统的核心,所有光轴定位的跟踪算法都在该FPGA中实现。为了保证坐标数据的实时性,FPGA内部制作了一个RS232接口控制器,可通过该串口选择光轴检测算法,实时获得光轴信息。FPGA将获得的光斑位置用十字丝图案叠加在原始图像中送出到图像输出接口。
1.3 外设接口单元
外设接口有CCD模拟视频输出接口、CCD数字输出接口,在PGA产生的行同步、场同步等控制信号作用下,视频DA将二维的数字图像信号进行空间编码,转换成为一维的模拟全视频电视信号,通过TV监视器显示。CCD数字输出的是经计算的CCD光轴的脱靶量数据,这些数据将通过串口送到后续APT控制器中,去调整二维转台的工作状态。
2 基于FPGA的CCD成像驱动
CCD采用ICX285AL传感器,该传感器采用SONY公司EXviewHAD CCD技术,具有高的探测灵敏度和动态范围,基于该传感器开发的相机的DR可以达到65dB以上,能够适应恶劣的自然环境。CCD 分辨率 1024×1040,帧频 25Hz,采用 14位RS-644(LVDS)输出,具有2组串口(TTL/LVDS)和两组外触发(TTL/LVDS)模式,工作参数可通过串口进行全面控制,相机接口协议简单,用户使用方便。ICX285AL CCD成像驱动信号包括水平和垂直同步信号、刷新信号和四相位驱动脉冲信号,其中驱动时钟包括:水平驱动时序时钟4个(2组H1和H2),垂直驱动时序时钟V1,V2A,V2B,V3,V4。图2为利用FPGA设计的CCD相机驱动时序波形图。
3 空间激光光轴检测模型
3.1 大气信道约束
激光在空间信道中传输受环境影响较大,特别是大气湍流的影响。大气湍流是大气中局部温度、压强的随机变化而带来的折射率随机变化的现象,大气的速度、温度、折射率的统计特性服从“2/3次方定律”[2,3],即

式中,Dn分别代表速度、温度和折射率场的结构函数,r为观察点之间的距离,C2n为相应场的结构函数,l0为漩涡内尺度,L0为漩涡外尺度。大气湍流引起光强闪烁效应服从对数正态分布,其表达式为:
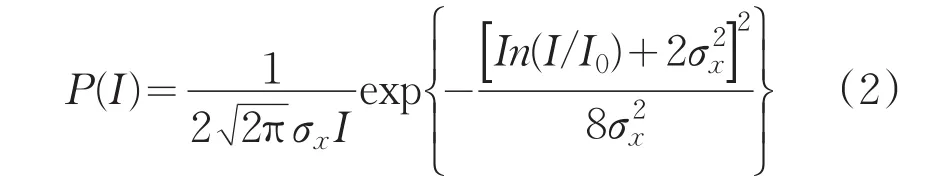
其中,I0表示光强均值,σx表示闪烁指数(光信号的对数振幅标准偏差)。
大气湍流是影响CCD跟踪精度的主要因素。图3为传输距离13.6km大气条件下接收到的激光光斑形状图。
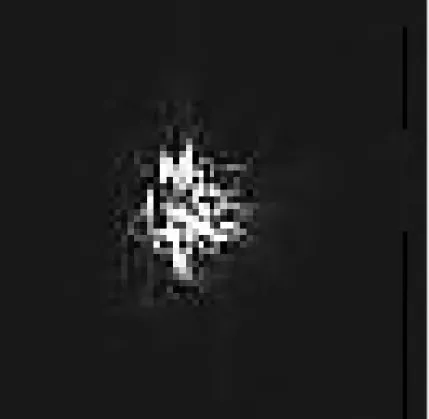
图3 13.6km接收到的激光光斑形状
从图3中可以看出,大气湍流使得接收端光电探测器上出现光斑破碎、闪烁及功率起伏现象,即影响光轴检测精度引入信道干扰误差。
3.2 CCD光轴检测模型
当采用面阵CCD进行光轴实时检测时,通常应用多像素细分技术。其中最为典型的多像素细分方法是质心拟合方法,其细分拟合表达式为:
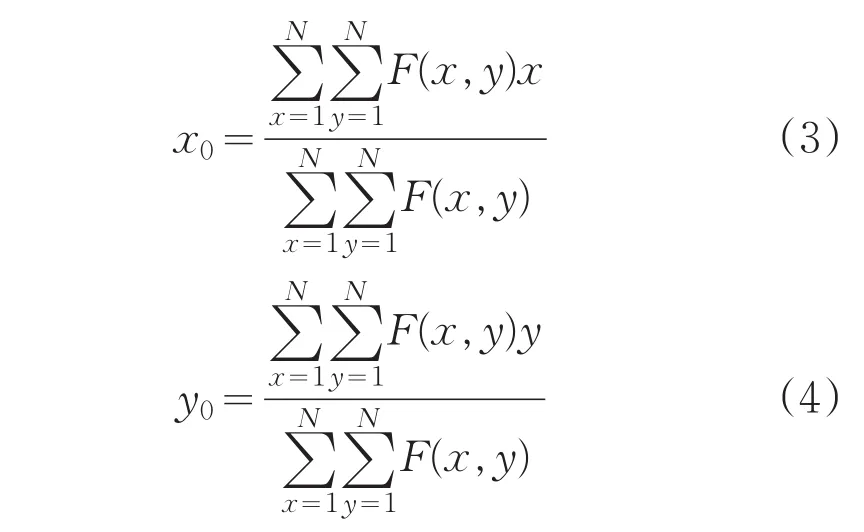
式中,F(x,y)是位置(x,y)处图像的灰度值,x,y分别为像元的横、纵坐标。
在整个光轴检测系统中,像面的光电检测器件直接影响整个系统的固有分辨率,其中最小的光电成像单元直接决定光轴检测系统的固有分辨力,即最小成像的直径dA(一般与艾里斑尺寸相关)与光学系统的焦距 f直接确定了整个光轴检测系统的固有精度Δ:

可见理想情况下,整个检测系统的精度是由两部分组成,第一部分是整个系统的固有分辨精度Δ,第二部分是系统的检测细分精度σ,其理想情况下的光轴检测精度θ最终表达式为:

对于CCD检测系统来说,通常采用多像素细分手段实现光轴检测,所以由质心计算公式可知,该系统的拟合精度和CCD的像元尺寸直接相关,进而导致整个检测系统的细分精度σ不仅和大气环境相关,而且还会被CCD像元尺寸dr这一个条件所约束,所以CCD检测系统的可控性较强,其CCD系统的分辨率θCCD为:

可见由于CCD像元尺寸dr这一个条件一般很小,所以这种阵列式系统受大气信道影响不是非常敏感[4-7]。
4 试验及结论
4.1 测试平台
需求观测距离L=10km,基台尺寸大致为0.2m,为了能够分辨出目标,要求光学系统最小分辨力为ΔL=0.1m,则系统最小分辨角为:

CCD像元尺寸为6.5μm,则系统焦距为:

以550nm的绿光作为分辨基准,系统最小的衍射极限口径为60mm,从工程角度可取系统口径D=65mm,这时系统相对孔径为1∶10。由于观测距离远,系统焦距长,为减小筒长,光学系统采用后补偿式卡式系统,系统口径D=65mm,焦距f=650mm。
4.2 实验结果与分析
图4为制作的CCD相机实物图,该相机与上述光学系统相互配合,理论分辨率可达到10μrad。在大气环境中,如何才能让系统达到上述的理论值,这与系统跟踪带宽直接相关。因为只有系统的跟踪带宽超过湍流的扰动带宽后,望远系统的对准能力才会得到充分的发挥。
图4 CCD相机实物图
图5为CCD相机监测大气信道对激光传输影响的试验图。试验环境:传输距离1km、信标光波长800nm、天气条件为薄雾、小雨和晴天三种情况。图中显示了CCD相机在不同天气情况下光轴变化曲线,说明大气信道环境对激光传输产生的光斑闪烁及抖动现象,并且抖动中大范围抖动带宽只有2Hz左右(小雨情况)。

图5 不同天气条件CCD接收光轴测试曲线
图6为配合二维跟踪转台测试时,跟踪带宽对比曲线。
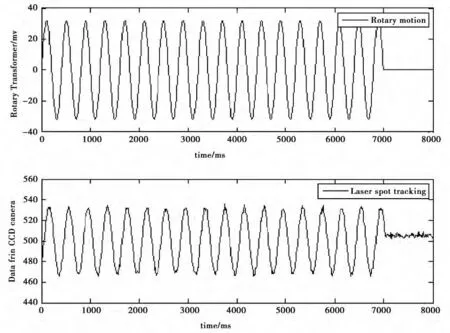
图6 位置传感器输出与CCD检测曲线比较图
图6中上图是伺服轴角旋转变压器给出的实时位置信息,下图是CCD的随动光轴检测数据,横坐标单位为时间,纵坐标为CCD采集的光功率值,像素值可根据像元尺寸和焦距换算角度值,可见该系统的整体跟踪带宽可达到2.5Hz左右[8-10]。将CCD光轴检测系统应用于空间激光通信APT系统的试验中,由于其跟踪带宽大于湍流大范围抖动带宽,所以其10μrad的理论检测精度可以被充分发挥出来。图7为安装在光学基台上的效果图,图8为传输距离3.7km实际跟踪效果,图9为伺服控制示意流程图,图10伺服控制器硬件结构框架示意图。

图7 安装在光学基台上的相机

图8 跟踪测试
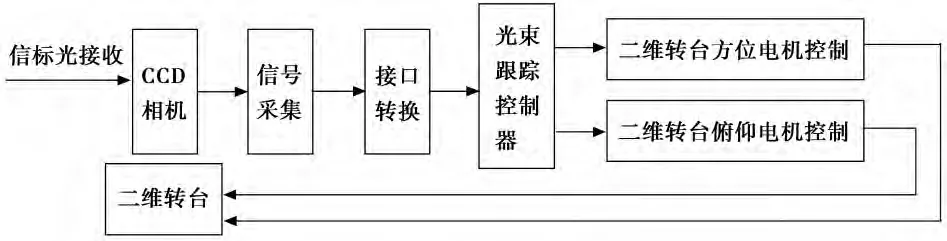
图9 伺服控制示意流程图
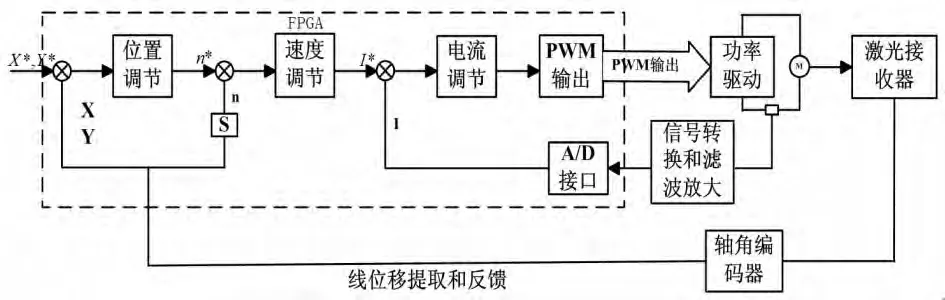
图10 伺服控制器硬件结构框架示意图
5 结论
通过CCD图像处理系统的仿真和野外试验,可以得到如下结论:
(1)利用FPGA技术实现CCD成像驱动和光轴位置检测,具有较强实时性,可以轻松完成近百兆每秒的数据处理,可以为高速伺服控制系统服务。
(2)由公式(7)可知,以CCD为代表的阵列式光轴检测系统,其检测精度不仅与光斑尺寸、系统焦距相关,而且还与像元尺寸直接相关。因为CCD探测器的像元尺寸通常很小,可以从公式(7)的数学表达式上得出,其固有分辨精度较高。在进行光轴检测时无需过多依赖像元细分,而大气信道对光轴检测的影响主要体现在像元细分误差上,所以这种光轴检测系统对大气干扰的敏感程度较低。
(3)不同环境下的大气信道对光轴检测精度影响较大,如何对信道干扰加以抑制将成为未来发展的一种重要方向。
[1]姜会林,佟首峰.空间激光通信技术与系统[M].北京:国防工业出版社,2011.
[2]母一宁,刘泉,于林韬.哈特曼技术在序列光斑检测中的应用[J].光学精密工程,2011,19(9):2197-2204.
[3]母一宁,王贺,李平,等,脉冲状态间隔调制方法及恶劣环境下通信实验[J].通信学报,2014,35(3):224-230.
[4]母一宁,王贺,李平,等.光斑尺寸对光轴检测的约束分析及验证试验[J].红外与激光工程,2014,43(12):3678-3684.
[5]母一宁,孙高飞,李淑军,等.利用时间监测的联合感知模型及空间态势模拟方法[J].红外与激光工程,2012,41(11):3008-3018.
[6]母一宁,王贺,李平,等.光轴检测模型中背景干扰分析与闪烁补偿方法探讨[J].激光与光电子学进展,2013,50(6):46-50.
[7]母一宁,刘艳阳,李平,等.大气环境下的四象限激光监听方法与试验[J].半导体光电,2014,35(3):523-526.
[8]母一宁,李平,于林韬,等.应用于增量式光电编码器的相关自适应滤波方法[J].光子学报,2011,40(10):1452-1458.
[9]母一宁,于林韬,朱一峰,等.基于增量式光电编码器细分的自适应滤波技术研究[J].计量学报,2012,33(2):110-114.
[10]母一宁,李平,王贺.单光栅与双光栅衍射角度检测对比分析[J].红外与激光工程,2014,43(5):1616-1620.
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
中国交通信息化(2022年12期)2022-02-11
摄影之友(2020年12期)2020-12-23
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
中国医疗美容(2015年1期)2015-07-12
电子设计工程(2015年8期)2015-02-27
应用光学(2014年3期)2014-06-01
