基于GPRS的可移动式池塘水质无线监测节点的设计
2014-12-06 07:53周恒瑞马从国王业琴金德飞
福建农业科技 2014年11期
周恒瑞,马从国,王业琴,陈 万,金德飞
(淮阴工学院 223001)
在水产养殖中素有“养鱼先养水”的说法,鱼类养殖水环境的好坏直接影响到所养殖鱼类的品质和效益。随着水产养殖密度的不断增加,养殖水域水质环境日趋恶化,病害发生率越来越高,由此引发的水产品质量安全问题日益突出。迫切需要应用有效的水质环境监测系统对水产养殖水质进行评估,及时了解水质问题,采取有效的措施调控水质,保障水产品安全、高效生产。目前,在池塘水质检测的无线监控系统的设计中,大多采用传感器布点相对固定的分布式多点监测方法[1]。理论上检测布点越多、布点设置越科学,越有利于全面检测水质,但所用传感器也越多,这对成本控制来说是不利的;而目前应用于生产的水质环境监测系统对于节点的能量供应多数采用电池供电,这也限制了节点的使用。鉴此,本研究提出了基于GPRS的可移动式池塘水质无线监测节点设计方案,主要由太阳能供电,较好地解决了上述问题。
1 节点结构与功能设计
节点主要由电源管理、传感器、行走控制、控制处理器、定位与 GPRS通信五部分构成[2-3],其结构图如图1所示。节点节能的方案是节点设计必需考虑的内容[4],不论是GPRS通信还是GPS定位能量消耗都较大,传感器的数据采集和节点的移动也需要比较多的能量,如果采用脉动式运行,那么节点的移动就必然受到限制,且节点的数据采集和定位也不能做到实时[5-8];采用电池直接供电又不能达到长期稳定运行的设计目标[9]。鉴此,采用太阳能电池加蓄电池为节点供电,白天和夜晚采用不同的模式:白天模式下,光照强度良好时仅通过太阳能电池供电,富余的电能可为蓄电池充电,光照弱于一定强度时蓄电池补足太阳能电池供电不足部分;夜晚模式下,整个节点采用定时间歇式供电,每半小时工作1次。

图1 节点结构组成图
1.1 节点结构设计
为了使节点能够在水面上平稳自由地移动,需要考虑浮力机构成:太阳能电池板 (680 mm×540 mm ×28 mm,50 W/18 V,5 kg)、 蓄 电 池(12VDC/5A h,3 kg)、检测机 (外壳100 mm ×80 mm ×50 mm,200 g)、传感器、推进电机X2(200 g)。为了使节点可靠地浮在水面上,采用双体浮船结构 (图2)。船体的前进由M1电机控制,转向由M2电机控制。本设计是可以在控制命令下自由移动的节点,对于池塘养殖来说:溶解氧含量、pH值、温度、氨氮含量这几个参数是决定水质的主要参数,特别是池塘的底层水体,这几个参数的含量情况直接影响水产养殖的效益[10-12]。因此,对这几个参数的监测必然要使用多个传感器,考虑到池塘环境的特点,要求移动时传感器能收回,测量时传感器能被放到一定深度的水中[13],这就要求传感器采用总线收集数据并集中在一起,传感器的收放也需要一个电机来单独完成,如图3所示。

图2 浮力机结构简图

图3 传感器结构及升降结构简图
1.2 节点的硬件选择
节点由单片机 (处理器)、信号采集处理单元、GPRS无线通信单元、GPS定位及行走控制单元、电压检测单元等组成,图4为节点硬件框图[14]。节点选用STC89C52单片机作为数据处理核心,根据命令采集各传感器的数据和GPS坐标信息,并打包经GPRS无线网络传给上位机。STC单片机使用方便,指令执行速率、抗干扰能力相较于同档产品都有优势。传感器的选择在考虑池塘水质检测要求的同时,也要考虑成本因素。温度测量选用DS18B20温度传感器,pH测量选用SH-101pH值传感器,溶解氧测量选用WQ401传感器。节点通信方面采用西门子的MC35i模块,它支持GPRS无线接入、AT指令集、SIM卡应用,且体积小、重量轻。在定位方面选用GPS模块和天线一体化的台湾环天 GPS模块 (型号为 EM-408),模块内有RTC记忆电池,使用方便。行走电机选用信达电机有限公司的XD-3420电机,工作电压为DC 12 V,功率为20 W。

图4 节点硬件框图
1.3 节点的软件设计
节点上电后首先进行初始化,接着检测太阳能电池的电压情况,根据检测结果确定节点工作模式,如果太阳能电池电压低于阈值时则判定为夜晚模式 (模式1),节点停止自主移动,定时检测水质情况;电压大于阈值时根据水深情况,节点可以自主移动或按需移动 (模式2),节点开始定时测量温度、pH值、溶解氧含量等数据,GPRS无线模块根据自身内嵌的TCP/IP协议栈将数据先打包成TCP/IP包,然后将其封装成 GPRS分组数据包,在连网成功后定时传送到 GPRS网络[15-16],模块还可以接收从监控中心发送的信息,并转换后通过串口传送到控制模块。在确定池塘的四边顶点的GPS数据后通过上位机传送到节点控制器上,控制器先把这个坐标范围内水域以2 m为标准尺度栅格化,然后随机选取其中10点作为目标点进行检测,所有检测点完成后再随机抽取10点检测并重复这一过程,当然也可通过上位机发送指令指定检测点。节点船体在池塘水中由行走变为定点停止,因池塘环境较复杂,水下会有水草、树枝等杂物,不能使用锚来固定,在没有其他辅助停止设备的情况下,实现定点停止行走控制单元必须按照一定的控制算法使节点停靠在目标点附近。
为了实现快速接近目标点并准确停止,采用模糊PID控制算法,模糊控制行走单元结构如图5所示。图中:θ*为到给定坐标方位角,θ为节点的实际移动的方位角,e为θ*与θ比较的偏差,ec为偏差的变化率。

式中:△t为采样周期。

图5 模糊PID控制结构图
由于模糊控制部分类似于PD控制,具有响应速度快、动态性能好的优点,但稳态精度低,所以在节点行走控制系统中加入PID控制器,当移动误差在一定范围内时再采用PID控制来消除移动位置的稳态静差。图5中U1、U2分别为模糊控制和PID控制得出的行走电机转速期望值,E、EC、U分别为模糊控制器的输入、输出,ω*为期望节点位移角,ω为位移角,ω*与ω的偏差eω经过转速调节器产生期望的节点移动的位移角Te*。
本系统采用个人PC机作为上位机,监控中心软件的设计采用面向对象的程序设计软件Visual Basic 6.0开发,提供一个可视化的监控界面,可直观、方便、快捷地掌握终端节点的状态,及时发现并处理异常情况,实现与GPRS终端的通信。系统的节点主要流程如图6所示。

图6 节点主程序流程图
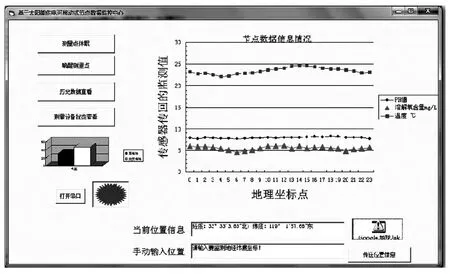
图7 上位机监测软件
2 试运行结果
以淮阴工学院校园内的某一池塘作为对象对系统进行测试,图7为节点传感器在24个测量点,其中第23点为当前位置传回的数据情况。测量点是每隔1 h自动向上位机传送所采集到的数据,上位机对接收到的数据进行存储和分析。按下手动输入位置选择按钮,输入经纬度信息后即可使节点移动到指定位置采集数据。图7中的柱形图是指蓄电池和光伏电池的当前电压情况。测量系统也可根据需要,如节点出现故障不停发送错误数据时,对测量点下达休眠指令,故障排除后下达取消休眠指令。试运行结果表明,测量节点运行可靠,数据采集收发正常。
3 讨论
本设计是基于GPRS无线技术的监控系统,测量节点运行可靠,数据采集收发正常,可以实现对养殖水域水质环境的实时监控。GPRS作为一种覆盖面广的移动通信技术,已得到越来越多的应用,
对实现监控中心与现场节点设备之间数据的无线收发等功能具有独特的优势[17-18]。随着社会工业化进程的加快,特别是在近几年我国经济突飞猛进的发展,水污染事件时有发生,进行有效的监测监控显得尤为重要。由于本节点系统具有实用性和长时效性方面的优点,将有更广阔的应用前景。
[3]卞贺明,夏善红.用于水质检测的微传感器及微系统 [J].器件与技术,2009(6):350-357.
[4]周福元.鱼塘水质变坏的原因、危害及调控措施 [J].水产养殖,2013(5):65.
[5]黄建清,王卫星,姜晟,等.基于无线传感器网络的水产养殖水质监测系统开发与试验 [J].农业工程学报,2013,29(4):183-190.
[6]陈军,盛占石,陈照章,等.基于GPRS的水质自动监测系统的设计 [J].传感器与微系统,2009,28(7):77-79.
[7]ALEXEY G,HONSEOK Y.Modular Verification of Preemptive OS Kernels[J].ACM SIGPLAN Notices,2011,46(9):404-417.
[8]REJAIE R,ESTRIN D,HANDLEY M.Quality Adaptation for Congestion Controlled Video Playback over the Internet[J].ACM SIGCOMM Computer Communication Review,1999,29(4):189-200.
[9]崔永良,李霞.基于GPRS的无线水质自动监测系统的研究[J].制造业自动化,2012,34(6):150-152.
[10]胡珺,李春晖,贾俊香,等.水环境模型中不确定性方法研究进展 [J].人民珠江,2013(2):8-11.
[11]赵小强.水质远程监测智能环保系统 [J].计算机工程,2010,36(17):93-95.
[12]梁礼明,梁毓明.基于无线传感器网络的都阳湖水质在线监测 [J].节水灌溉,2012(11):34-37.
[13]武静涛,马长宝,刘永波.水质监测无线传感器网络节点的设计 [J].仪表与传感器能,2009,17(12):2575-2578.
[14]郑淼淼,赵苍荣.无线远程传输的水质自动监测系统 [J].化工自动化及仪表,2012,35(1):92-94.
[15]陈明,卜涛.面向水产养殖无线传感器网络的绿色供能技术研究 [J].传感器与微系统,2010,29(11):33-39.
[16]NIJMEIJER H,BERGHUIS H.On Lyapunov control of the buffing equation [J].IEEE Treans on Circuits Systems,1995,42(8):473-477.
[17]赵敏华,李莉,呼娜.基于无线传感器网络的水质监测系统设计 [J].计算机工程,2014,40(2):92-96.
[18]张蕾.基于GPRS的电力远程抄表系统设计与应用 [D].济南:山东大学,2011.
猜你喜欢
无线互联科技(2021年4期)2021-04-21
儿童故事画报(2020年6期)2020-08-31
当代水产(2019年1期)2019-05-16
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年14期)2018-08-21
电子制作(2016年15期)2017-01-15
小天使·一年级语数英综合(2016年7期)2016-05-14
小天使·一年级语数英综合(2015年8期)2015-07-06
河南科技(2014年23期)2014-02-27