波浪补偿技术现状和发展趋势
2014-12-05 02:19王哲骏谢金辉邓智勇
舰船科学技术 2014年11期
王哲骏,谢金辉,高 剑,邓智勇
(武汉第二船舶设计研究所,湖北 武汉430064)
0 引 言
21世纪是人类全面认识、开发利用和保护海洋的新世纪,蕴藏在海底的资源已成为世界各国能源开发的重点对象,是人类可持续发展的重要财富。尤其是近20 多年来,随着人类深水海域活动的频繁开展和海底资源新种类的不断发现,人们深刻地认识到了海洋高新技术是确保国家海洋权益、资源安全乃至国家安全的重要保障[1]。
海上船舶在进行吊放回收作业时,海浪的起伏会使船舶呈现复杂的运动如横摇、纵摇及垂直方向的升沉运动,进而会影响船舶上的吊放系统安全、可靠作业。如在高海况下,船与船之间的货物吊运可能会造成碰撞,严重时可能会使钢丝绳断裂,对船舶吊放作业和货物造成严重的损害。
20世纪70年代,我国“7103”潜水救生艇模型进行海上试验时没有采用升沉补偿因吊索冲击断裂而丢失;2004年,“海龙1 号”ROV 海试时目标因补偿不当造成脐带断裂丢失;2008年,“海龙2号”海试时因过度升沉脐带松弛和张紧造成疲劳断裂;日本“海沟”号万米ROV 作业时也因脐带断裂丢失[2]。分析表明这些破坏都与波浪的升沉运动有关。
波浪补偿技术对于海洋资源勘探开采设备、海上货物吊运或补给有着重要的作用。目前波浪补偿技术使用的领域主要集中在海洋平台钻采作业、海上货物起吊、潜器回收吊放、大洋采矿、舰船间物资转运 如航行时的燃油 弹药 食品 补给 等方面。
1 波浪补偿系统工作原理
波浪补偿技术从工作原理可分为以下3 类:
1)被动式波浪补偿系统
被动式波浪补偿系统一般由张紧器组件(补偿油缸及滑轮组)、蓄能器组件、吊放钢缆及重力补偿油箱等组成,如图1所示,其中张紧器组件由滑轮组与补偿油缸组成。蓄能器组件由蓄能器与氮气瓶组成。钢缆从蓄缆绞车伸出,绕过滑轮组,与负载连接。当工作母船受波浪影响上升时,负载由于惯性使钢缆拉力增加,钢缆上拉力增大,导致张紧器被迫压缩,从而释放钢缆,补偿负载位移,使负载尽量保持在平衡状态。另一方面,补偿油缸中的液压油压入蓄能器中,存储能量。反之,工作母船随波浪下沉时,系统产生进行相反补偿,释放能量。工作时,系统相当于一个液压弹簧,对波浪产生的影响进行缓冲。被动式波浪补偿系统工作时基本不消耗能量,一般用于重载且精度要求不高的场合。
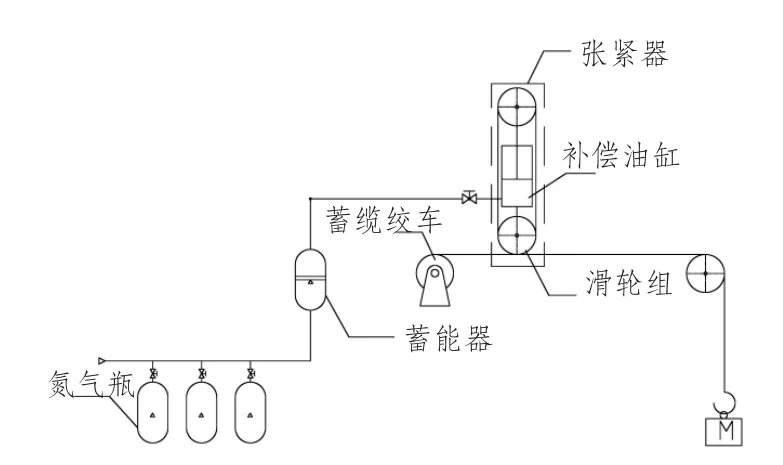
图1 被动波浪补偿系统原理组成图Fig.1 Passive waves compensation
2)主动式波浪补偿系统
主动式波浪补偿系统采用的补偿方式一般为主动绞车补偿,如图2所示。主动补偿系统动力元件为补偿绞车,负载传感器(通常是加速度传感器)检测被吊物品运动情况,将得到的信号输入至控制系统,同时,绞车的转速传感器检测绞车的转动状态将得到的信号也输入至控制系统。控制系统对接收的传感器信号进行适当的处理和计算后得到液压绞车的控制量,发出信号控制伺服阀开口再通过油缸调节斜盘角度来控制绞车的输出转速,实现对被吊物体升沉运动的补偿。

图2 二次调节波浪补偿系统原理组成图Fig.2 Active waves compensation
3)复合波浪补偿系统
复合波浪补偿系统主要由泵站、控制阀组、蓄能器、复合油缸、绞车、缆绳、负载以及传感器组成,其系统原理组成图如图3所示。传感器检测到负载位移,输入到比较器中与期望信号进行比较,比较器输出两者偏差到控制器,控制器做出相应计算,然后输出电流或电压控制信号,控制信号经功率放大器放大后控制电液比例阀(即三位四通阀)阀芯运动,增大或减少进入油缸主动腔的压力油流量;另一方面,没有波浪信号时,负载的重力主要由复合油缸被动腔承担。当负载和补偿系统一起随波浪上下起伏时,负载产生向上或向下的加速度,因此活塞杆上的受力改变,被动腔充入或流出液压油。通过活塞杆上下移动,系统实现对负载的补偿。
2 波浪补偿系统发展现状
随着人类对海洋资源的不断勘探和开采,世界范围内对海洋开发装备的研究已经进入了一个崭新的历史阶段,波浪补偿作为海洋装备物品吊放、海上石油钻采和海上设备布放回收等作业中的重要技术,得到了广泛的研究和应用。
2.1 国内波浪补偿技术研究与应用
1)潜器收放中的波浪补偿技术
杨文林等[3]对水下机器人升沉补偿系统进行了研究,采用液压绞车主动补偿形式实现水下机器人的补偿。在模拟实验中,负载为1 000 kg 可以在母船升沉幅值 时 补偿后将幅值控制在 左右 其控制方法主要是对死区进行补偿去掉控制对象的非线性因素,然后将系统当作线性系统来分析,并且在系统中设有前馈控制器。

图4 水下机器人升沉补偿Fig.4 The AHC of ROV
吴开塔[4]对ROV 被动式升沉补偿系统进行了研究,根据“海洋六号”4 500 m ROV 吊放方案,确定了以串联补偿器的形式进行被动补偿。升沉补偿的最大有效载荷约12 000 kg,最大升沉补偿幅度大于4 m,最大张力波动小于30%。并且建立了完整的串联被动补偿器的带缆式ROV 系统的动力学模型,推导和计算了系统在不同深度下的系统特性,同时根据计算分析的结果对于系统可能出现的共振问题,提出了使用流量调节阀调节系统阻尼用来避免共振的方案。
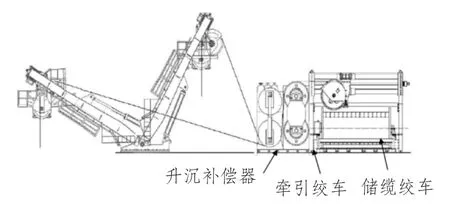
图5 ROV 被动补偿吊放装置Fig.5 Passive waves compensator for ROV
武汉第二船舶设计研究所设计的某300 m 潜水系统,其潜水钟的吊放系统也使用了被动式波浪补偿系统,该系统中负载达到了16 000 kg,基本能够适应4 级海况,补偿范围可以达到±2.5 m。

图6 潜水系统补偿装置Fig.6 The passive waves compensation of diving system
我国 蛟龙 号载人潜水器的母船 向阳红09”的主甲板上安装的A 型吊架同样使用了波浪补偿技术,起吊绞车采用恒张力补偿系统,吊架顶部的链接臂也设有纵横方向的被动补偿使得“蛟龙”号载人潜水器在向海底吊放及回收时都能够平稳进行。“蛟龙”号波浪补偿系统负载能力能够达到22 000 kg,适应4 级海况。

图7 “蛟龙”号Fig.7 The Jiaolong
2)海上船舶间货物转运补给中的波浪补偿技术
陆卫杰等[5]对舰船并靠导弹补给及波浪补偿系统进行了研究,建成了具有波浪补偿功能的舰艇并靠导弹补给系统。补给系统最大重量为2 000 kg,采用锚泊并靠的补给方式,补给速度为2 枚/h,能够适应4 级海况。同时建立了舰艇并靠导弹补给及波浪补偿受控系统动力学模型,利用多体动力学离散时间传递矩阵法,对舰艇并靠导弹补给及波浪补偿系统进行了动力学求解,并且搭建了模拟实验平台工程上的实现。
图8 舰船导弹并靠系统Fig.8 Missile sealifts with wave compensation
徐小军等[6]基于差动行星齿轮传动机构,提出了一种新型主动式波浪补偿系统。介绍了波浪补偿的系统组成,在分析差动行星轮系调速特性的基础上 阐述了波浪补偿系统的工作原理和补偿机制。该项目的定载荷为2 500 kg,垂直补偿能够达到±6 m,响应时间小于0.5 s,最大补偿速度为1.2 m/s。根据波浪补偿的2 个主要目的,按照从补给船吊装载荷到被补给船的整个工作过程,建立了波浪补偿系统的数学模型,为实现系统的计算机控制提供依据。
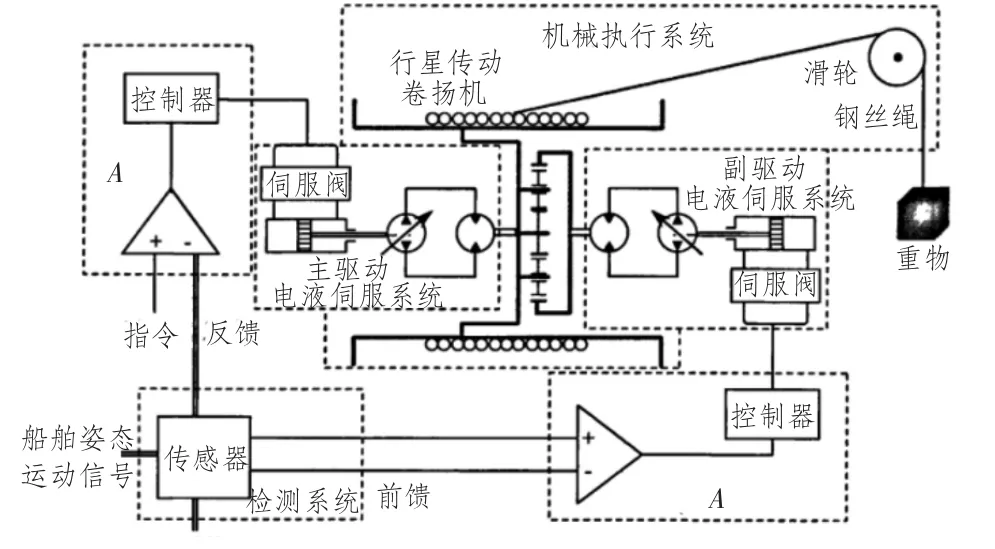
图9 新型主动式波浪补偿系统结构Fig.9 The new type AHC system
刘贺等[7]采用绞车主动补偿形式进行波浪补偿起艇系统研究。补偿绞车主要由绞车本体、液压系统、张力检测装置和电控系统组成。其中电控系统采用PLC 控制器,由CPU、输入和输出模块等组成。液压系统由主提升系统和副随动系统2套子系统及其他辅助部件构成。补偿的海况最高可以适应4 级海况,额定负载为30 kN,起艇速度为25 m/min,最大补偿速度为100 m/min,恒张力值可调节范围为0 ~150 kg。

图10 起艇绞车原理图Fig.10 Wave compensation boat-lifting winch
3)大洋采矿作业中的波浪补偿技术
郑相周、罗友高等[8]按照大洋采矿补偿系统的要求提出了一种新型的基于并联机构的补偿平台。根据并联机构高强度 响应快和高精度等特点 将其运用在广义升沉补偿系统上能够满足要求。在实例计算中考虑4 级海况能够满足补偿要求。

图11 3-UPU 串并联混合补偿机构Fig.11 3-UPU series parallel compensation mechanism
黄锴、刘少军等[9]在分析已有海洋钻井平台及钻探船升沉补偿系统特性的基础上,依据大洋多金属结核中试采矿系统及1 km 深水范围海试状况,联合虚拟样机技术和控制系统仿真技术对深海采矿升沉补偿系统进行了设计研究。建立了基于液压动力源的升沉补偿系统采矿船多刚体机械动力学模型,提出了双油缸主动控制升沉补偿方案,设计了模糊自整定PID 控制器,创建了该系统的虚拟样机。根据该项目技术要求可知,其最大承载能力为3 000 kN,补偿系数为70% ~80%,升沉补偿行程为2.0 ~3.0 m,适应4 级海况。
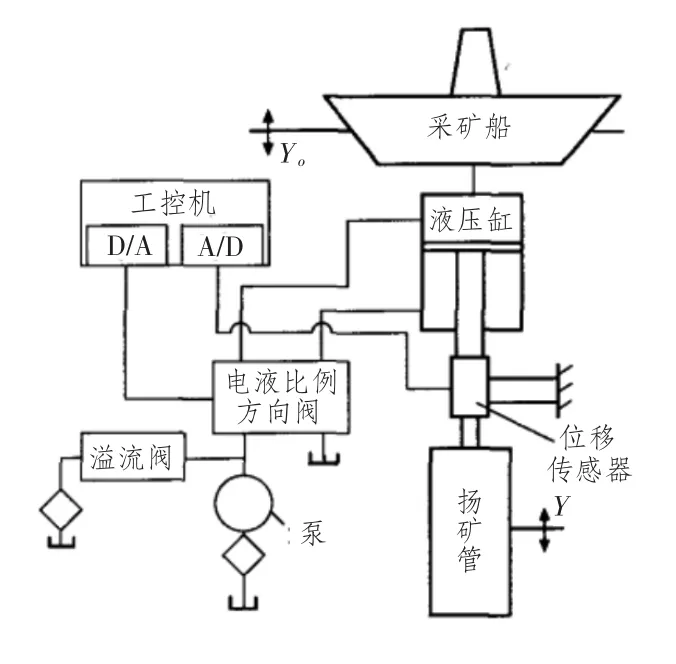
图12 深海采矿补偿系统Fig.12 Deep sea mining compensation system
肖体兵[10]对深海采矿装置智能升沉补偿系统进行了研究,提出了适用于轻载,中载和重载3 种深海采矿装置的升沉补偿系统,主要研究对象是水力流体提升式采矿系统中的扬矿管。3 种补偿系统的突出特点是采用电液比例技术 并且设计了模糊PID 控制器和前馈控制器,对电液系统的阀芯死区同时进行了补偿。
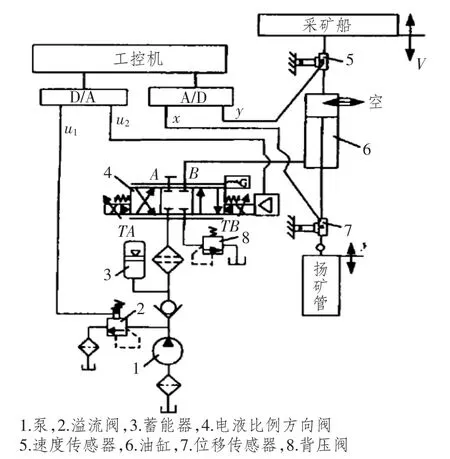
图13 重型扬矿管主动升沉补偿系统Fig.13 AHC system of heavy lifting mine pipeline
2.2 国外波浪补偿系统技术及应用
由于海洋装备波浪补偿技术难度较大,我国由于自身工业基础条件比较薄弱,加之起步较晚,国内鲜有成熟的设备面世。在欧美等发达国家,海洋平台配套的波浪补偿设备中已发展的相当成熟,不少公司都有比较成熟的产品推向市场,在这方面的研究也比较深入。
荷兰Huisman 公司在海上起重机设计制造方面有着悠久的历史,其海上桅杆式起重机配备了主动式风浪补偿系统,设计结构紧密,采用高精尖技术,主要用于海洋工程船舶与半潜式平台。许多海上桅杆式起重机的工作水深可达5 000 m,采用深海起升系统,每个系统起升能力达300 t。深海起升系统是由1 部牵引绞车和1 部储绳绞车构成。
图14 Huisman 补偿系统Fig.14 Huisman′s AHC
挪威海事液压(MH)公司自1968年以来专门设计和生产船用起重设备 是世界上最先进的装有升沉补偿系统的船用起重机的生产厂[11]。挪威海事液压工程公司生产的钻柱升沉补偿系统(见图15),当船体上升时,靠井内钻柱质量压缩主液压缸,驱动与主液压缸相连的高压液气罐内气体压缩,天车滑轮组向下运动;当船下沉时,与主液压缸相连的高压液气罐内气体膨胀,驱动主液压缸滑轮组向上运动。该升沉补偿器最大补偿行程为7.62 m;适应平台升沉±2.0 m,周期为12 s;最大补偿能力为2 670 kN。

图15 MH 钻柱升沉补偿系统Fig.15 Drill string heave compensation
博士力士乐公司研发的旋转式主动波浪补偿系统(RAHCS)(见图16)是一种基于二次控制技术的波浪升沉补偿系统,广泛应用于潜器布放回收和海上起重等领域。旋转式主动波浪补偿系统通过实时调节二次元件的斜盘角度,来获得预定的输出转速,从而实现对船体升沉运动的补偿。由于采用了先进的二次调节技术,RAHCS 具有补偿率高,响应速度快和装机功率低等优点。除此以外,该系统根据实际的作业需要设置有恒定张紧模式,空钩模式,减震器模式等多种作业模式,供操作时选择。

图16 博士力士乐二次调节补偿系统Fig.16 Rexroth′ RAHCS
除了常用的海洋平台和吊运上使用的补偿以外,力士乐公司还能针对于两船之间干货及液货的补给进行补偿 见图 在两船补给过程中由于波浪的作用船与船之间往往存在着相对运动,当跨索连接两船的时候如果不进行波浪补偿很有可能会由于两船之间的相对运动使得跨索被扯断造成严重的后果,使用补偿以后就能使补给工作正常平稳的进行。

图17 海上干货及液货补给Fig.17 Replenishment at sea & fuelling at sea
由于发达国家对波浪补偿的研究起步较早发展至今研究也较为成熟,所以在机构设计及控制策略方面有不少研究成果。
JorgNeupert,TobiasMahl 等[12]主要从控制角度对升沉补偿进行了分析,提出2 种常用的补偿控制策略:一种是力的补偿,使绳子的拉力恰好等同于负载的重力以及波浪升沉运动加速度所产生的附加力;另一种是速度补偿,减少负载与波浪之间的相对运动,以减轻缆绳的拉力。除此以外,还对波浪的起伏使用了预测算法,能够加快系统的响应性并且提高补偿效率。
Shinichi Takagawa[13]在补偿机构方面提出了新的看法,主要切入的角度是补偿用的缆绳以及滑轮组系统,文中提到在海水深度较浅的时候补偿效果能够得到很好的体现,而随着海水深度的增加补偿效果会随之降低,主要原因是由于缆绳的弹性所致。文章中提出了一种新的补偿机构设计,能够大大提高滑轮组的效率以及缆绳的使用寿命。
Andreas Huster和Hans Bergstron 等[14]则从机械的角度,详细考虑了系统摩擦力、阻尼、滑轮惯性、气瓶容积等因素对补偿效率的影响,并且提出滑轮应使用高效率的轴承,并且滑轮转动惯量应尽量小以减小力的损失。
Thor I.Fossen 与TorArne Johansen[15]建立了起重装置数学模型并研究了模型的系统辨识,通过水池实验确定了系统固有频率和阻尼系数。设计出实验系统的控制与测量系统,通过引入波浪同步控制方法,在主动式波浪补偿系统中加入前馈补偿器,实现了波浪同步起重机控制,并在水池中进行了缩比系统实验,实验表明带波浪同步的波浪运动补偿系统在性能上大大提高。

图18 新型滑轮组系统Fig.18 New type pulley blocks
3 发展趋势
升沉补偿对于海上作业的来说在安全,快速性,高效以及经济性等方面具有极大的优势,不论是商业上还是军事上都有着很大的实用价值。所以补偿系统的快速发展是各种海上作业的必然需求。升沉补偿系统的发展趋势主要有以下几个方面:
1)快速响应
随着升沉补偿技术的发展和市场的需求,补偿系统的快速性变得十分重要,尤其是在舰船之间吊运补给品或者武器的时候,提高快速响应性能够增加海上军舰的战力,对与一般的吊装则可以大大提高整体作业的效率以及经济性。在提高快速响应性的同时仍然要保持系统具有合格的准确性是以后研究中的关键问题。
2)适应更大的载荷
随着人类对海洋探索的深度记录不断被刷新,在诸如采矿领域随着开采深度的提高以及海洋科考方面的要求,扬矿管和潜器等附加设备的重量也会越来越大,这对于升沉补偿来说就提出了更高的载荷要求,应能够适应更大的载荷。
3)高补偿精度
由于海洋复杂的环境和严苛的作业要求,补偿的目的已经逐渐从早期的安全性向高精度发展,在满足吊放作业安全平稳的要求以外,对于吊放的精度要求也越来越高。这就对于补偿系统的机构设计以及控制系统中的波浪预测算法和实时的反馈提出了更高的要求。
4 结 语
升沉补偿系统具有军民通用的特性,在各种海上或者海下作业中的应用已经日趋广泛,国外的这类技术在向越来越成熟发展,而国内还处于刚刚起步的阶段,大多数时候还是需要进口产品。近年来国内各个厂家和机构开始重视升沉补偿系统的发展和研究,升沉补偿系统在军事以及海洋开发等各个领域都会有更好的发展应用前景。
[1]刘淮.国外深海技术发展研究[J].船艇,2006(10):6-18.
LIU Huai.The development of deep sea technology abroad[J].Ship and Yatchs,2006(10):6-18.
[2]HASHIMOTO K,WATANABE M,et al.Missing of the ROV kaiko vehicle-problem on the secondary cable[J].Oceans 2004(2):804-811.
[3]杨文林,张竺英,张艾群.水下机器人主动升沉补偿系统研究[J].海洋工程,2007,25(3):69-72.
YANG Wen-lin,ZHANG Lan-ying,ZHANG Ai-qun.Study of active heave compensation system for vehicle[J].The Ocean Engineering,2007,25(3):69-72.
[4]吴开塔.ROV 被动式升沉补偿系统理论及试验研究[D].上海:上海交通大学,2011.WU Kai-ta.Theretical and experimental research on passive heave compensator for remotely operated vehicle system[D].Shanghai:Shanghai Jiaotong University,2011.
[5]陆卫杰.舰艇并靠导弹补给及波浪补偿系统研究[D].南京:南京理工大学,2006.
LU Wei-jie.Study on system of missile sealifts with wave compensation for navy ships connected parallel[D].Nan Jing:Nanjing University of Science and Technology,2006.
[6]徐小军,何平,徐循,等.基于DSP 的主动式波浪补偿起重机控制系统设计[J].国防科技大学学报,2008,30(1):110-114.
XU Xiao-jun,HE Ping,XU Xun,et al.Design of control system for an active heave compensation crane with DSP[J].Journal of National University of Defense Technology,2008,30(1):110-114.
[7]刘贺,李彬,胡晓东.波浪补偿起艇绞车的研究[J].上海造船,2008(2):30-31.
LIU He,LI Bin,HU Xiao-dong.The study of heave compensation boat-lifting winch[J].Shanghai Shipbuilding,2008(2):30-31.
[8]郑相周,罗友高.基于并列机构的大洋采矿补偿平台构型设计分析[J].中国机械工程,2003,14(18):1565-1567.
ZHENG Xiang-zhou,LUO You-gao.Design analysis of ocean mining compensation based on parallel mechanism[J].China Mechanical Engineering,2003,14(18):1565-1567.
[9]黄锴.1000m 海试采矿系统升沉补偿系统控制方法探讨及虚拟样机研究[D].长沙:中南大学,2003.
HUANG Kai.Control ways and virtual prototype study of the 1000m sea bed mining trial′ s heave compensated system[D].Changsha:Central South University,2003.
[10]肖体兵.深海采矿装置智能升沉补偿系统的研究[D].广州:广东工业大学,2004.
XIAO Ti-bing.Research on intelligent heave compensation system for deep-sea mining device[D].Guangzhou:Guangdong University of Technology,2004.
[11]廖谟圣.海洋石油钻采工程技术与装备[M].北京:中国石化出版社,2010.
LIAO Mo-sheng.The technology and equipment of ocean oil drilling engineering[M].Beijing:China Petrochemical Press,2010.
[12]JORG N,TOBIAS M,BERTRAND H,et al.A heave compensation approach for offshore cranes[C]//2008 American Control Conference,2008.
[13]TAKAGAWA S.A new concept design of heave compensation system for longer life of cables[D].Tokyo:The University of Tokyo,2010.
[14]HUSTER A,BERGSTROM H,et al.Design and operational performance of a standalone passive heave compensation system for a work class ROV[J].Oceans 2009:1-8.
[15]FOSSEN T I,JOHANSEN T A.Modeling and identification of offshore crane-rigsystem[EB/OL].Available:http//www.itk.ntnu.no/research/HydroLab/report/hydrolaunch_madel.pdf.
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
中国港湾建设(2022年1期)2022-02-24
船舶与海洋工程(2021年5期)2021-11-18
上海理工大学学报(2021年3期)2021-07-20
船舶标准化工程师(2020年1期)2020-06-12
当代陕西(2020年24期)2020-02-01
人生十六七(2016年14期)2016-12-01
电子制作(2016年21期)2016-05-17
科技与企业(2015年18期)2015-10-21
中国航海(2014年1期)2014-05-09