
基于HLA的无人机作战仿真系统设计与实现*
2014-12-02 06:07
舰船电子工程 2014年9期
(海装武汉局驻景德镇军事代表室 景德镇 333002)
1 引言
现代无人机主要执行战场侦察与监视、目标截获、火力校正、摧毁评估以及电子诱骗与电子干扰等任务,发挥着日益重要的作用。而无人机系统的建模与仿真演练,可以达到使指挥人员和操作人员熟悉无人机系统的组织指挥、实际操作,进行战术推演的目的,提高所需岗位的能力,如决策、指挥、操作等,以便于从“失败”过程中多次实验、形成体验、摸索经验,从而节省大量训练经费,提高训练质量。
分布交互仿真[1](Distributed Interactive Simulation,DIS)是指采用协调一致的结构、标准、协议和数据库,通过局域网或广域网,将分散在各地的仿真设备互联,形成可参与的综合性仿真环境。为满足越来越复杂的作战仿真需求,美国国防部于1995年起开始建立一个通用的仿真技术框架,核心是高层体系结构(High Level Architecture,HLA),到现在已经发展为成熟的体系结构。其中常用的模拟软件STAGE[2](Scenario Toolkit And Generation Environment)是加拿大Virtual Prototypes(VPI)公司推出的用于国防和航空航天领域的灵活且实时的仿真与训练环境,用于建立人工环境并使之富于生机的软件工具。
本文旨在利用HLA 技术完成无人机作战仿真系统的设计研究。
2 模型中的假设
运动中的无人机是一个极其复杂的系统[3],无人机本身是一个弹性体,消耗性载荷的使用又使得无人机是一个变质量体,同时质心的位置又随时变化,无人机内部的动力系统,操纵系统等因素的影响使得其运动方程中的惯性项变得很复杂,而外力项(包括重力、空气动力、发动机推力)则是气动外形、飞机姿态和飞行参数的复杂函数。由于具体无人机的参数各不相同,且模型过于复杂,通常在适当的范围和程度上作必要的假设:
1)将地面坐标系视为惯性坐标系,忽略地球的曲率。将大地视为平面,无人机的飞行高度一般远小于地球半径,故忽略飞行高度的变化所引起的重力加速度的变化。
2)将无人机视作刚体,按质点处理,不考虑攻角和横滚角的作用,且质量不发生变化。
3)大气条件按照国际标准,认为大气是平静的,无扰动的,因此无人机相对气流的速度和对地速度相同。
4)在仿真步长时间内,飞机的各个参数保持不变,飞机飞行中无侧滑现象。
由于本文主要探讨仿真系统的设计与实现,以及受篇幅的影响,仿真所需的无人机运动学模型、雷达反射特性仿真模型、目标的运动学模型、目标探测设备模型、目标行为模型、雷达威胁模型在这里不具体给出。
3 系统的FOM 设计与实现
完整的无人机作战仿真系统总体结构包括以下几部分:无人机地面控制系统的仿真接口、平台飞行作战仿真系统以及数据库支持系统。在进行无人机的作战仿真时,地面控制系统通过RTI仿真接口将无人机的任务计划和相应的控制指令发送给飞行作战仿真系统,无人机平台仿真模块在收到相应的任务计划和指令后,平台任务管理针对任务计划和指令的内容在动态的仿真战场环境中实现无人机的任务控制和管理,控制无人机的任务执行,具体结构如图1所示。
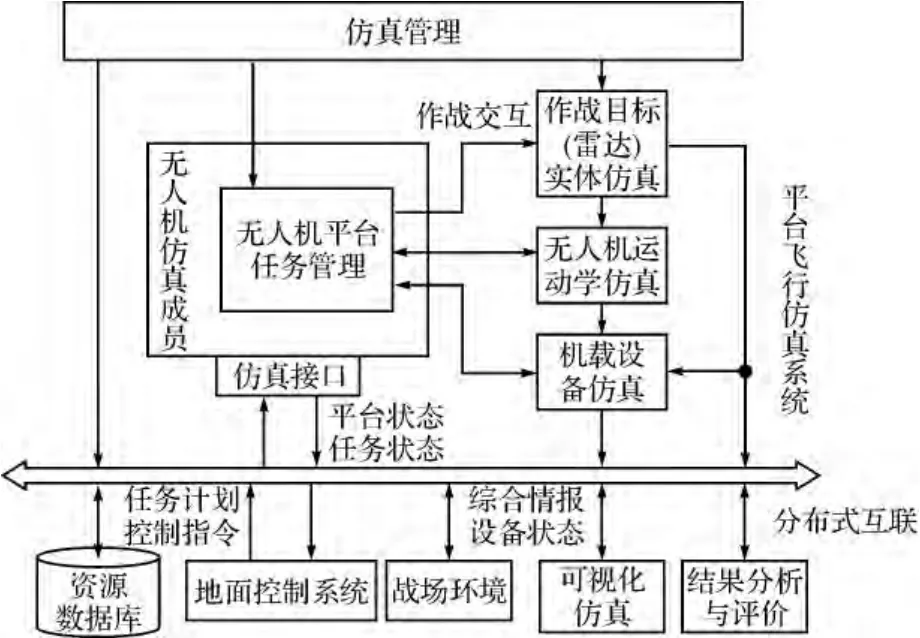
图1 作战仿真系统结构
1)联邦设计
根据无人机作战仿真系统的总体结构,同时考虑到RTI的实时仿真能力,无人机作战仿真联邦的成员划分如表1所示。
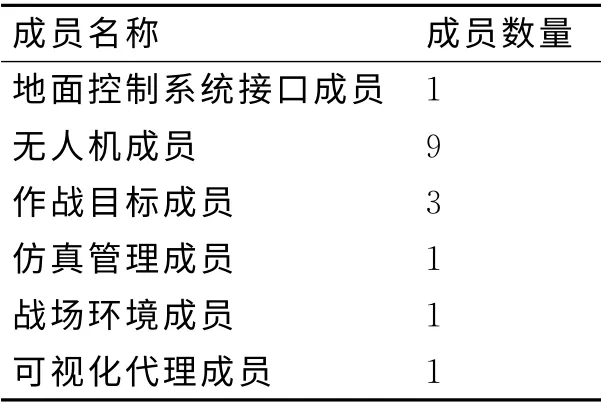
表1 联邦成员划分表
设定作战仿真系统主要仿真九架无人机,因此无人机成员有九个;地面控制系统以一个成员接口代理的方式接入RTI联邦,整体以一个RTI成员的方式对外。作战目标仿真成员按照地面目标,空中目标和海上目标划分为三个仿真成员。按照上述划分方式,整个无人机作战仿真系统联邦包含16个仿真成员。
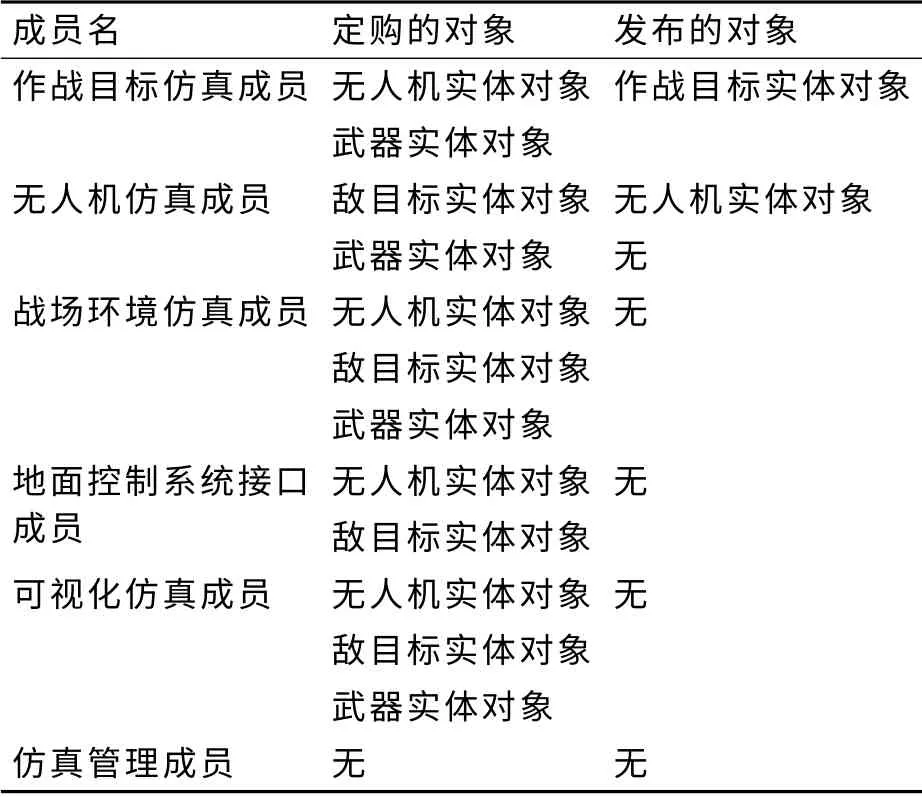
表2 联邦成员与对象类之间的公布订购关系表
在HLA 联邦中,联邦成员是由具体的对象类组成,成员通过公布和订购对象类的属性来实现与外部成员的数据交互,完成自己的逻辑功能。在无人机的作战仿真的过程中,实际参与仿真的实体有武器实体、无人机实体以及敌方雷达等作战目标实体(包括空中目标、地面目标、海上目标),按照面向对象的原则构建系统,同时为了尽量简化系统的代码实现,整个系统主要由三个对象类组成:无人机实体对象、敌方目标实体对象、武器实体对象。
根据联邦成员划分和对象类组成,在我们系统中,联邦成员与对象类之间的订购和发布关系如表2。
2)对象类设计
根据对象类划分和实体仿真模型,按照面向对象的原则,仿真系统FOM 模型的对象类设计如下。
整个FOM 模型中有一个基类对象类Entity,属性由一般实体所具有的通用属性组成,包括实体编号、实体类型、实体角色、实体重要度、实体位置、速度、加速度、姿态角、航向、活动半径和当前时间。其他实体类型都是Entity类的子类,上述通用属性可以从Entity类继承获得,而各自实体对象的专有特性可以根据其自身物理模型的定义自己属性来实现。同时,为了仿真的方便,将无人机的状态单独定义了一个复合数据结构。对象类的结构和继承关系如表3所示。
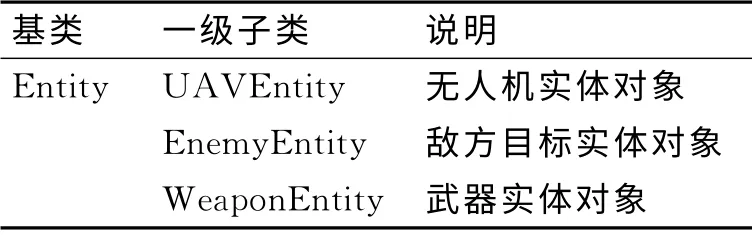
表3 对象类结构表
限于篇幅,这里只列出了Entity对象的属性描述。Entity对象类包含的属性如表4所示。
其中,Position类型等复合类型,在HLA 中由专门的复合数据类型表描述。
3)交互类设计
在HLA 中,交互类描述了成员之间的短暂的数据交互行为,如武器开火。作战仿真系统在运行过程中包括交互类型主要有以下几种:
(1)仿真运行控制类交互。包括系统初始化(初始化仿真想定)、初始化完毕、启动,暂停,停止,子系统请求、子系统状态查询,子系统状态报告等交互类型。
近50年来,肺癌的发病率明显增高,成为危害生命健康的一种主要疾病,由于早期症状不明显,几乎 70%的肺癌患者在就诊时已失去手术机会(Ⅲ期或者Ⅳ期),这部分患者往往伴有淋巴转移以及血行转移,因此肺癌患者总体预后情况不理想[5-6]。疾病本身使得患者机体免疫功能下降,临床上各种抗肿瘤治疗方案可能会进一步破坏机体的免疫防御功能,更易发生院内感染,发生率明显高于非肿瘤患者[7],且一旦感染,预后较差。
(2)指挥通信类交互。分为上行数据指令和下行数据指令类:上行数据指令类主要包括作战计划(初始配置)、任务计划、机载设备配置计划、平台控制指令、传感器控制指令交互等等。下行的数据和指令类主要包括无人机任务请求、无人机任务执行情况、目标确认/引导情况、无人机状态信息(包括毁伤信息)、敌方状态信息、威胁信息交互等。
(3)实体战场类交互。主要包括武器发射交互,目标命中。
(4)战场环境信息交互:主要包括自然条件数据。
(5)效能评估信息交互:效能评估主要用于仿真结束后的结果分析,因此相关数据信息需要在仿真过程中由相应的成员通过交互发送给仿真管理成员保存、分析和评估。
在交互类的设计中,设计了一个基本交互类BasicInteraction,它包含基本的参数发送者标识、接受者标识和交互数据内容,其中的交互内容采用XML格式描述字符串,方便分析和解读。
4 STAGE在HLA 中的应用
基于HLA 的仿真系统如图2所示,使用Stage的目的除了要利用其模型数据库中的模型,还要达到以下两个目的:一是可在Stage真实场景中布置各联邦成员,并把场景中联邦成员的参数通过网络传到各仿真节点,作为各联邦成员运行的初始化参数。二是各联邦成员模型运行过程中产生的参数变化必须及时通过网络回送到Stage,从而使Stage能及时更新场景中的模型参数来演示整个仿真过程。
要实现以上两个目的,需要处理好Stage的本身时钟和RTI逻辑时钟之间的关系。Stage时钟是一个固定的时钟,其刷新频率为30.3帧/秒,且无法通过编程去控制。而RTI的逻辑时钟由RTI来统一调度管理,它和各个“时间调节”联邦成员的“时戳下限值LBTS(Lower Bound Time Stamp)”有关。由于很难保证这两个时钟的同步,因此就不能在Stage刷新时执行有关RTI的操作。基于以上因素并考虑到Stage主要用来演示和回放整个仿真过程,其演示过程和联邦的整体推进过程在时间上有所不同步并无太大影响,所以可以在实现时剥离Stage和联邦,在控制台节点上另设一个控制联邦成员,使该联邦成员和Stage同时运行。在联邦的执行过程中由控制联邦成员在后台负责联邦仿真数据的订购,而Stage在联邦初始化时参与联邦的执行,以后则仅仅从控制联邦成员取来订购的数据,在前台更新显示模型。

图3 仿真总体结构图
1)系统仿真的设计原则
整个系统的仿真总体框架如图3所示,大体可分解为三部分:仿真前、仿真中和仿真后。
各模块主要功能:
DI及扩展DI模块。建立仿真系统各主要组成部分的仿真原型,即设计各仿真原型的数据结构及属性设置项。
DE及扩展DE 模块。对DI所建立的原型进行实例化,提供系统仿真场景及显示界面。
SIM 及扩展SIM 模块。是整个系统仿真的调度管理器,负责处理实体链表;当加入用户模块后可控制DE中实体的仿真动作。
STAGE脚本模块。利用STAGE内置脚本语言及其扩展语言,设计符合仿真系统各平台工作流程的算法,来控制各平台的仿真动作。
对外通信模块。由于STAGE 自带的仿真结果显示界面不能满足本系统的显示要求,该模块的功能是扩展STAGE与外部进程的通信功能,利用VC界面显示应用程序来实时接收、显示仿真结果,并对结果进行概率统计。
2)系统仿真设计流程
根据计算机仿真学的方法以及仿真系统需求,设计了系统仿真的流程。
首先,分析仿真系统的组成及其工作原理,了解STAGE仿真软件的仿真机制。再根据功能需求,对SATGE 进行二次性开发,扩展其DI、DE、SIM、脚本语言、与外部进程通信等功能接口。
然后,根据仿真系统的组成,建立各平台的仿真原型,并在DE 中实例化。实例化以后,就得为各平台的仿真动作选择合适的仿真算法,并通过编程实现仿真动作。
最后,选取几种典型的作战方式进行仿真,分析仿真结果,提出系统实际使用的合理建议。
3)仿真案例
战术背景:红方某机群将要执行轰炸蓝方某重要目标的任务,在蓝方该目标周边设有防空系统对空警戒,防空系统由防空雷达和防空导弹部队等组成,为配合红方机群成功突破蓝方防空系统,现派出9架无人机与战斗机编队飞行(或在轰炸机群之前),运用无人机群来干扰压制蓝方雷达,使其在探测距离和/或探测精度上下降,必要时摧毁敌方雷达,最终降低敌方雷达的发现概率,达到掩护红方机群成功突防、顺利完成轰炸任务的目的。
根据任务,九架无人机在红方基地按顺序发射,根据轰炸机群的任务航线和事先已获得蓝方地面雷达站的大概方位,无人机机群初始飞行方向就是航线附近的蓝方雷达站的方位。进攻开始前敌方只有值班雷达开机,如图4所示。
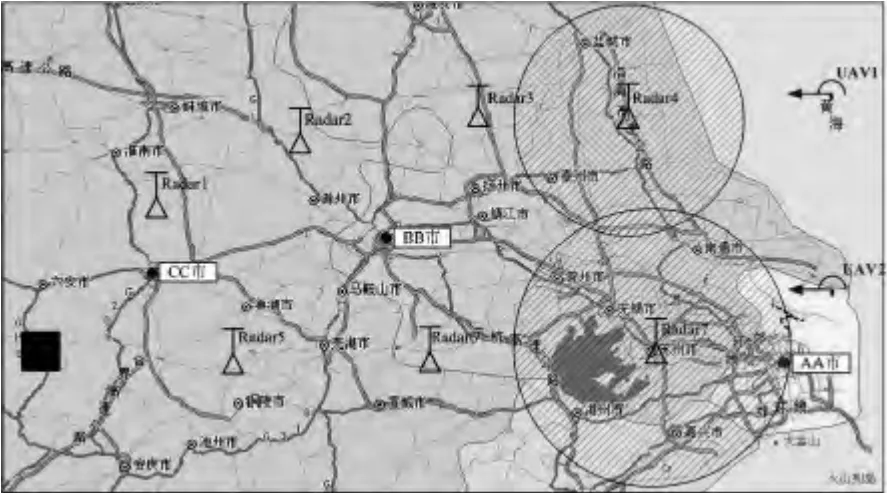
图4 蓝方只有值班雷达开机(进攻前)
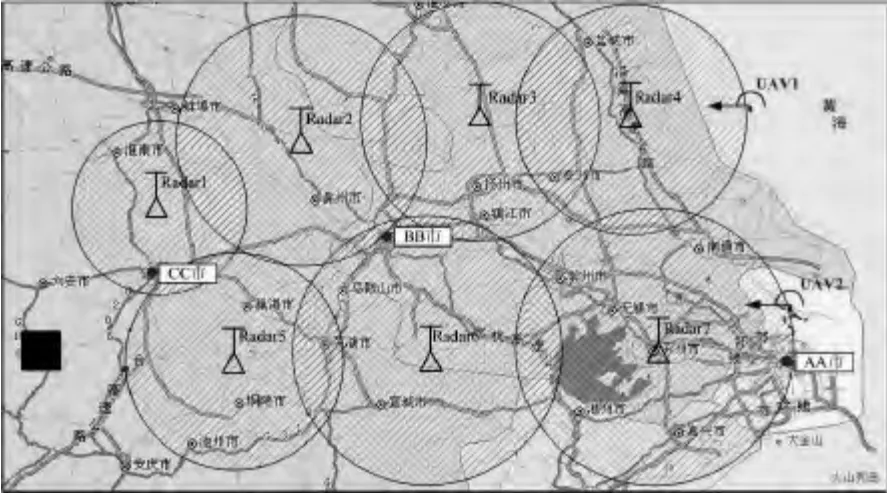
图5 蓝方雷达全部开机探测范围(无人机未受干扰)
在向目标飞行过程中,敌方值班雷达发现无人机后,通知防空雷达网中的所有雷达开机,对空搜索(如图5所示)。
无人机根据事先侦察的敌情分配任务,结合当时搜索到的具体雷达位置信息,进行任务分配的修正,有重点地实施干扰,从雷达分布与当前任务航线的关系,确定威胁最大的雷达,将关键位置的雷达摧毁。各飞机通过机载自导导引头搜索雷达目标(搜索雷达的发射波的频率),然后搜索发射波的波源(雷达),攻击雷达目标。当然,在无人机的飞行和搜索过程中,雷达也可能会发现无人机,发现无人机后,雷达将无人机的方位信息传输给数据库记录下来,并实时更新这个数据,用来模拟锁定了无人机,如果锁定超过10s,则表示无人机被蓝方防御系统摧毁。无人机发现雷达,开始向雷达俯冲,若目标雷达关机则拉起,直至再次发现雷达,再发起俯冲攻击,最后根据撞击点的坐标(即最后时刻的无人机位置信息)计算与雷达坐标的位置距离,若在距离雷达10m 之外,则无人机退出显示,雷达继续工作,若在10m 范围内,即按雷达被摧毁,雷达退出显示。
注意:在无人机搜索过程中,如果同时搜索到几个目标,无人机根据最近原则攻击最近的雷达目标。多个雷达锁定一个无人机,只要一个锁定时间超过界限,则表示无人机被摧毁。
5 结语
本文采用无人机通用模型,根据HLA 的仿真系统联邦和成员的开发过程,针对无人机作战仿真系统的特点和内部仿真结构,设计了系统的联邦FOM 模型,并按照HLA 成员程序的设计流程,开发了相关成员模块。针对具体的仿真想定,通过仿真实验,验证了将STAGE 用于基于HLA 的仿真态势显示的可行性。
[1]黄柯棣.系统仿真技术[M].长沙:国防科技大学出版社,2004:23-27.
[2]STAGE User's Guide Version 4.0[M].Virtual Prototypes Inc.,2001:10-20.
[3]沈林成,高国华,等.开放式飞行任务规划方法[J].宇航学报,1998,28(2):13-18.
[4]梁永恩.基于HLA 的分布式虚拟海洋战场环境研究[D].长沙:国防科技大学机电工程与自动化学院,2002.
[5]IEEEP1516.2Standard for Modeling and Simulation(M&S)High Level Architecture(HLA)-HLA Object Model Template(OMT),HLA-Frame and Rules,IEEE P1516 Standard Modeling and Simulation[S].2000.
[6]STAGE Installation Guide Version4.0[M].Virtual Prototypes Inc.,2001:20-30.
[7]STAGE Developer's Guide Version4.0[M].Virtual Prototypes Inc.,2001:30-40.
[8]万立德,陈家庆.STAGE 战术仿真软件的研究与扩展[J].电子对抗技术,2005(6):37-40.
[9]张家祥.HLA 仿真技术应用教程[M].北京:国防工业出版社,2007:60-68.
[10]金伟新,肖田元,马亚平,等.联合作战仿真模型体系的设计[J].计算机仿真,2003,8:4-6.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
家庭影院技术(2020年10期)2020-12-14
中国外汇(2019年18期)2019-11-25
家庭影院技术(2019年7期)2019-08-27
当代陕西(2019年5期)2019-03-21
民间故事选刊·上(2017年5期)2017-05-17
领导决策信息(2017年9期)2017-05-04
领导决策信息(2017年9期)2017-05-04
小小说月刊(2015年5期)2016-01-22
微型小说选刊(2015年3期)2015-11-18
