
虚拟卡口系统的设计
2014-11-15 02:08贺波涛
电子测试 2014年4期
徐 钲,贺波涛
(武汉邮电科学研究院 通信与信息系统,湖北武汉,430074)
0 概述
随着城市建设的快速发展和人们物质生活水平的不断提高,国内各大城市的机动车保有量呈爆炸式增长,交通管理和城市治安日渐成为现代城市管理急需解决的重大难题。在城市的重要出入口、重要区域以及车流量大的道路上安装治安高清卡口系统,成为解决上述两大难题的主要手段之一。然而现阶段的治安高清卡口系统,无论是采用线圈触发式、全视频触发式或者线圈加视频触发式作为触发技术,都需要单独安装具有前端智能分析的高清摄像机和车辆检测器。当使用线圈触发式时,还需要破坏路面敷设线圈,不仅增加了人力和物力的投入,也无法有效利用现有道路上安装的摄像机资源。
本文设计的虚拟卡口系统采用多帧差分、图像边缘特征分析、模式识别技术,是集智能视频分析、图像处理、机动车辆信息提取于一身的智能监控系统。其主要利用道路、车辆出入口已经安装的摄像机,通过视频触发式,对视频中的每一帧图像进行分析与处理,自动识别机动车辆、非机动车辆和行人,提取视频中机动车辆的详细信息,如车牌号码、车牌颜色、车身颜色、车辆徽标等。该系统可嵌入于现有公安系统的智能交通监控系统使用,也可将车辆信息上传至治安高清卡口系统,进行违法判断分析、关联车分析、黑/白名单比对、假/套牌车分析等,对嫌疑车辆进行告警处理。本系统的普及可有效解决高清卡口系统建设成本高、工程施工复杂、与现有资源结合不紧密的弊端。
1 虚拟卡口系统组成
虚拟卡口系统主要包含三个部分:前端视频源采集部分、网络传输部分和虚拟卡口平台部分。系统总体组成如图1所示。
1.1 前端视频源采集部分
该部分包括目前主流的视频采集设备:模拟枪机、模拟球机、高清网络枪机和高清网络球机。前端设备采集的视频信息传输至虚拟卡口平台的视频解码模块,统一转换成原始数据格式(YUV、BGR)后,再上传至视频分析模块进行处理。
1.2 网络传输部分
网络传输部分是各类业务开展的基础,负责将前端设备采集的视频信息传输至虚拟卡口平台相应的模块。该部分以IP网络为核心,主要由光网络、光纤收发器、网络交换机等设备组成,满足传送语音、文字、数据、图像等各类应用。
1.3 虚拟卡口平台部分
虚拟卡口平台部分主要包括以下几个单元:中心管理单元、统一网管单元、数据库、视频存储及回放单元、图片存储及调阅单元、媒体分发/转发单元、联网服务单元和业务服务单元。
中心管理单元实现各类传感器的接入、用户接入以及信令控制。支持接入的协议包括基于电信全球眼规范的SIP协议、ONVIF协议、GB/T28181协议、湖北省卡口接入规范等。支持接入的设备包括IP摄像机、DVR(数字硬盘录像机)、DVS(数字视频服务器)、NVR(网络硬盘录像机)、IPSAN(IP存储局域网)、搭载iOS/Android的移动终端等。
统一网管单元实现对平台的用户、监控设备、服务模块的配置管理,主要管理功能包括设备信息的录入和配置、用户角色权限的配置、用户信息管理、服务模块信息录入和配置、运维服务、拓扑管理、日志管理、报表管理等。
数据库分为基础数据配置库和用户数据库。基础数据配置库和用户数据库均支持MYSQL和ORACLE,既能在不同的机器上分开部署,也能够在同一台机器上基于用户名或者表空间部署。
视频存储及回放单元实现视频数据的存储、回放及播放控制功能,同时可对磁盘容量的空间进行管理,包括盘满策略和磁盘故障报警。
图片存储及调阅单元实现对图片数据的存储及调阅功能,同时可对磁盘容量的空间进行管理,包括盘满策略和磁盘故障报警。
媒体分发/转发单元是平台的核心媒体传送网元,在中心管理单元的媒体调度模块控制下完成视频流的分发和转发功能,支持多级级联和分布式部署。该单元既能向本平台的客户端、视频存储单元转发和分发视频,也能向外部联网平台转发和分发视频。
联网服务单元实现多个平台之间的联网,向上联平台提供音视频、图片、数据等服务,并获取下联平台的音视频、图片、数据等。
业务服务单元实现设备的业务处理过程,包括视频解码、视频分析、车辆记录的处理、视频通道的管理、车辆记录的传输、图片加密、断点续传等功能。
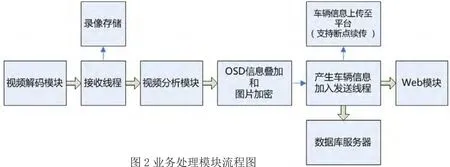
2 平台业务处理模块的设计
对于单路视频,其业务处理模块流程如图2所示。对于多路视频,其业务处理模块将前端ID和通道数与对应的接收线程和发送线程进行绑定,具体流程和单路视频类似,比如对于4路视频,则创建4个接收线程和4个发送线程进行并行处理,互不干扰。
视频解码模块实现不同格式码流统一转换为原始数据格式(YUV、BGR),然后上传给视频分析模块进行处理,其输入的视频源可能包括模拟、数字、高清等成像设备的视频通道。视频解码模块需要处理来自平台的指令,根据指令进行相应处理,并与其他业务处理模块进行交互。
视频分析模块负责对压入的原始数据码流进行分析,然后输出分析结果。其采用多帧差分方法实现目标的检测与跟踪;图像边缘特征分析实现车牌定位;神经网络算法进行车牌识别、车牌颜色识别、车身颜色识别、车辆徽标识别。
视频分析模块输出的结果会进入OSD(屏幕显示)信息叠加和图片加密模块。叠加信息包括:通行地点、时间、方向、车道、车牌号码、车牌颜色、车辆类型、行驶速度、车辆长度、违法类型、执法速度、超速比例等的车辆图片。为防止图像在传输和保存过程中被恶意篡改而失去法律效应,需要对图像进行加密操作,即在车辆图片被第三方工具篡改、或图形处理软件修改的情况下,系统自带的工具能检测出图片被篡改。
数据库服务器用于存储算法分析产生的车辆信息。
WEB模块实现WEB服务功能,供用户远程访问设备,用于实时视频显示、实时过车显示、车辆记录查询、车流量信息统计、记录和图片导出、设备状态管理、视频通道管理、用户权限管理和日志管理等。
3 视频检测算法
3.1 视频检测流程
(1) 差分运算、前景提取。
(2) 统计灰度信息判断视频白天/黑夜模式。
(3) 连通域搜索提取前景的矩形区域位置信息。
(4) 应用跟踪匹配算法对前景信息进行跟踪。
(5) 车道管理类根据算法准则对车辆进行捕获。
(6) 系统循环运算检测。
3.2 帧间差分法
帧间差分算法过程如下:
(1) 第一步:获取帧图片的灰度值数据
(2) 第二步:获取当前帧边缘特征
(3) 第三步:获取两帧之间灰度值差
(4) 第四步:获取灰度值差数据的边缘特征
(5) 第五步:二值化处理,将第二步和第四步所得的边缘特征进行二值化处理
(6) 第六步:获得运动物体。将第五步获得的两个图像做‘与’运算,即可得到运动物体的边缘特征。
3.3 八邻域检测算法
表1 某像素(i,j)的八邻域示意图
在对图像进行八邻域搜索时先要对图像进行腐蚀和膨胀操作填充前景目标中出现的空洞并去除噪声干扰。八邻域搜索算法主要是通过中心点,依次遍历中心点周围的八邻域是否为前景点,反复循环以上步骤,从而搜索到一个连通区域。
八邻域搜索算法的伪语言描述为(以黑色象素点):
输入:二值化图像序列
输出:分割出图像序列中的各个目标
void func_search8()
{
for(I=(0,nWidth-1) )
{
for(J=(0,nHeight-1) )
{
if( pixel(I,J) == 0 )
{
RecordArea(); // 记录区域的位置信息
PushStach(); // 将黑色象素点压入堆栈
While( StackIsNotNull () ) // 如果堆栈内有没有处理的象素点
{
(M,N) = OutStack(); // 弹出最上面的象素点
ProcessPixel(M-1,N-1); // 处理(M-1,N-1)ProcessPixel(M,N-1);
ProcessPixel(M+1,N-1);
ProcessPixel(M-1,N);
ProcessPixel(M+1,N);
ProcessPixel(M-1,N+1);
ProcessPixel(M,N+1);
ProcessPixel(M+1,N+1);
} end while
RecordArea();
} end if
} end for J
} end for I
} end func_Search8
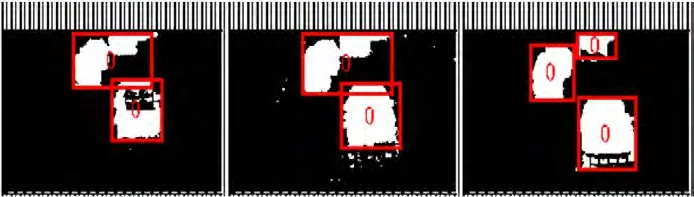
图3 图像序列的八邻域搜索算法示意图
3.4 目标车辆跟踪匹配算法
跟踪匹配算法主要是对八邻域搜索算法提取到的目标车辆进行跟踪,算法详细实现思想如下:
(1)建立一个全局链表用于保存跟踪到的目标车辆信息,主要是包括车辆矩形框位置,目标中心点,掩码等。
(2)根据当前帧提取到的目标区域更新全局信息链表。
(3)当全局链表为空时,直接将当前帧提取到的目标赋值到全局链表。
(4)当全局链表有信息时进行匹配操作,将当前帧获取到的目标区域,依次与全局链表中保存的目标区域的掩码进行求与操作,求出相与后为前景点的个数,当相与的前景点/全局链表中保存的目标区域前景点数大于一定阈值,则认为匹配成功。
(5)当匹配不成功时候,将当前帧目标区域作为新目标添加到全局链表中进行保存。
(6)当全局链表中目标连续5帧匹配不上,则任务该目标丢失,将该目标从全局链表中删除。
(7)依次循环上面步骤,不断对目标进行跟踪。
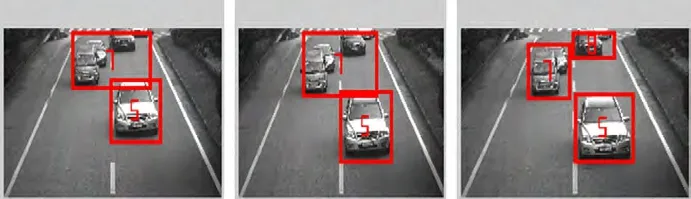
图4 跟踪匹配算法序列示意图
4 结论
本论文设计的虚拟卡口系统,利用道路上已安装的现有摄像机资源,对视频中每一帧图像的机动车辆、非机动车辆和行人等运动目标进行特征分割、视频信息提取和分析,将视频中的机动车辆详细信息上传至公安智能交通监控系统,对嫌疑车辆进行告警处理。本系统可以有效节约社会资源和财力成本,利用现有摄像机来实现治安高清卡口类似功能,对所有通过监控站点的运动目标进行动态监控。系统所采集的信息为公安部门有效打击盗抢和黑名单机动车犯罪、查缉交通肇事逃逸案件、分析交通状况、加强治安管理等提供有效的技术支持。
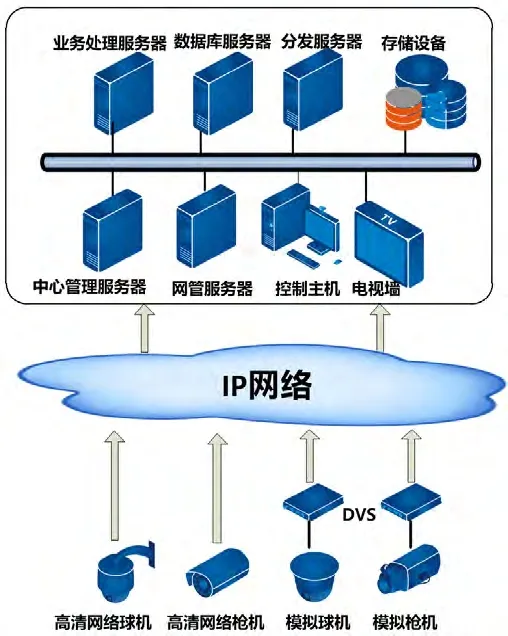
图1 系统总体组成
[1]唐震,黄烨亮,杨华.高清治安卡口智能信息识别系统及应用[J].电视技术,2012,36(14).
[2]王涛,李志蜀.基于精确传感网络的智能交通系统交通流模型[J].计算机应用,2012,32(4):905-909.
[3]Dalal N,Triggs B.Histograms of oriented gradients for human detection[C].Computer Vision and Pattern Recognition,2005.CVPR 2005.IEEE Computer Society Conference on.IEEE,2005,1: 886-893.
[4]Kalal Z,Mikolajczyk K,Matas J.Tracking-learningdetection[J].Pattern Analysis and Machine Intelligence,IEEE Transactions on,2012,34(7):1409-1422.
[5]KASTRINAKI V,ZERVAKIS M,KALAITZAKIS K.A survey of video processing techniques for traffic applications[J].Image and Vision Computing,2003,21(4):359 -381.
[6]Mi A K,Young M K.Improvements in real -time feature-based license plate character recognition[J].Key Engineering Materia ls,2005,277-279(1):355-360.
猜你喜欢
军事文摘(2022年24期)2022-12-30
成都信息工程大学学报(2019年2期)2019-08-28
家庭影院技术(2019年4期)2019-04-17
第二课堂(课外活动版)(2019年12期)2019-02-10
摄影之友(2018年12期)2018-12-26
成都信息工程大学学报(2018年1期)2018-05-31
新媒体研究(2015年7期)2015-12-19
武汉科技大学学报(2015年4期)2015-11-05
中国交通信息化(2015年6期)2015-06-06
中国交通信息化(2015年5期)2015-06-05
